基于ADAMS六足高层建筑清洁机器人的建模与仿真
2019-08-30王再英杨宇婷尚东森
王再英,杨宇婷,尚东森
(1.西安科技大学 电气与控制工程学院,西安 710054;2.西安科技大学 机械工程学院,西安 710054)
0 引言
随着经济的快速发展,城市高层建筑开始大量涌现。常年裸露造成的风化和复杂污染物的污染、酸碱侵蚀、灰尘堆积,都成为其清洁过程中需克服的困难[1~3]。我国高层建筑的清洁大多依赖人力,劳动强度大、施工效率低、危险性高,易出现高空坠落伤亡等各类安全事故,因此,用机器代替人工在高空进行清洁作业的智能清洁机器人具有非常广阔的市场[4]。对上述问题,本文在原有智能化机器人系统的基础上,提出了一种适合高空清洁作业的机器人,其目的主要是研发出适合在高空环境下的高层建筑清洁作业机器人。
由于机器人的研发需频繁地改变设计与大量实验,耗去大量的时间和精力。为此,选用SolidWorks三维建模软件构建机器人的三维实体模型,并将并将模型导入ADAMS仿真软件中。ADAMS系统输出运动学仿真结果[5~7],以实现对六足高层建筑清洁机器人的运动学研究[8,9]。
1 机器人结构设计
1.1 基本结构
本文设计了一种六爪高层建筑清洁机器人,结构设计如图1所示。机器人本体是一个上下两层的等边三角形吸附结构,两个三角形重叠部分构成六边形,六边形的内切圆放置六自由度运动平台。为了保护机器人的核心部件,在设计安装时,将清洁刷等硬件装置安装在下层底板,控制装置安装在上层底板,达到保护目的。
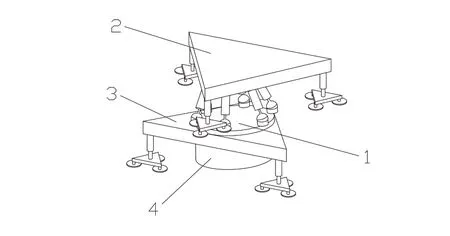
图1 机器人结构设计图
机器人在垂直立面上移动比在地面上移动更加困难。为了增大吸附力,提高吸附结构的可靠性,设计一个触脚上安装多个吸盘的结构,这也避免了当立面不平时因为单个吸盘漏气而出现吸附力下降[10,11]。机器人的6条腿均匀安装在三角形的顶角处,移动时依靠上下两层的三角形中的3条腿分别构成稳定的三角形支撑,每条腿部触脚部分别安装三个硬质吸盘构成三角形以实现再次稳定。
1.2 工作原理
躯干部分安装六自由度微动平台,通过控制六个气缸的伸缩运动,完成六自由度运动机构在空间六个自由度,即三维空间上的运动[12],为移动提供条件。将机器上层3条腿标记为1、3、5,下层3条腿标记为2、4、6。每只腿顶端的半球形铰链接头与底板相接,腿部结构为电动推杆,实现可伸缩。
机器人沿壁面上移的过程可通过其爬升一个步程为例来说明。初始状态如图2(a)所示,6条腿全部吸附。启动后,控制机器人中的气缸使上层组中的1、3、5腿吸盘释放空气并使腿部缩回。六自由度运动平台作用使上层底板上移带动上层组中1、3、5腿向上移,腿部伸出,触脚部真空吸盘吸附在壁面上。当1、3、5腿吸附稳定后,上层组上移并吸附完成,达到如图2(b)所示的状态。下层组同理进行上移与吸附,循环图2左和右的运动状态,以此达到前进目的。每完成一次完整的上移吸附后,控制系统控制下底盘中清洁装置进行清洁,从而机器人完成攀爬与清洁。

图2 机器人6条腿分布图
2 机器人三维模型建立
2.1 模型假设
六足高层建筑机器人的运动形式及其过程比较复杂,并且拥有多个自由度。机器人内部各关节之间的相互作用关系很难准确定义,因此,很难建立机器人柔性系统模型[5]。为了简化问题,研究中进行以下假设:
1)假设机器人只需要计算足部与壁面的接触摩擦力,并且假定机器人所有部件都是质量均匀分布的 刚体。
2)每一层上的吸盘计算时等效为一个吸盘。
3)机器人所受合力等效于其中心点,其驱动函 数[13,14]如下式所示:

2.2 SolidWorks三维实体模型建立
SolidWorks是一款功能强大的三维建模软件,操作使用便利,并且可以很好的和仿真软件进行联合建模仿真。利用SolidWorks进行实体建模的时,首先要明确机器人各部分零件,根据机器人各部分的尺寸创建零件图。零件图生成后,按设计要求逐个组装各部件,并根据不同的连接方式进行相应的约束添加。在上述假设的基础上,利用三维建模软件SolidWorks建立六足高层建筑机器人的模型。
2.3 ADAMS虚拟样机建立
在建立ADAMS虚拟样机时,将装配好的三维实体模型保存成Para solid格式后导入ADAMS中[15],合并构件,赋予几何材质定义各部件的材料属性。根据六足机器人的结构、运动特征,对六足机器人的模型进行约束的添加,通过ADAMS中Tool/Model Verify功能,验证模型能按照设计的六足高层建筑机器人的运动方式 运动。
在机器人的运动仿真中,首先要确定基础运动面。为方便绘制,选用地面假设为壁面,则机器人中心点的运动激励为y轴上的激励,在壁面上的运动等效为在y轴上的运动。机器人上下底板与六自由度运动平台固定,添加固定副(Fixed joint),六自由度平台移动带动机器人运动。躯干部分为六自由度运动平台,六自由度平台里每一个伸缩杆均为移动关节,每条腿的电动推杆亦为移动关节,添加12个移动副(Mobile joint) 。建立好的六足高层建筑机器人的ADAMS虚拟样机模型如图3所示。
3 机器人仿真分析
虚拟样机建模完成后,可对模型在设计之初所预想达到的各种工况进行仿真分析, 查看模型的运动状况,判断各构件之间是否存在干涉,机构运行是否满足设计要求,考察和评价机构的速度和加速度等特性,检验结构设计的合理性,最终使结构达到最优化,提高整机 性能[16]。

图3 六足高层建筑机器人的ADAMS虚拟样机模型
3.1 仿真设计
该机器人设计的关键是如何通过六自由度微动平台和机器人腿部电动缸的伸缩,实现其稳定吸附与移动功能,使其能快速准确地到达指定位置进行清洁。利用ADAMS软件对所设计的构件进行仿真分析,研究其能否满足实际要求,为进一步优化设计奠定基础。
对6个气缸的伸缩量、速度、加速度进行分析,验证机器人能否满足在清洁过程中稳定要求。对机器人在3个方向的位移、速度、加速度变化进行分析,观察机器人在三维空间的运动状态是否满足设计的清洁过程中在可上下移动以及稳定吸附功能。是否能做到在y轴上有上下移动和移动后稳定在该位移的状态;是否在z轴上一直处于一定位移(机器人自身高度在运动中不发生变化);是否在x轴上无位移(上下移动,无左右偏移)。
设置参数,对模型行运动仿真,中心点实现函数(1)、(2)、(3)所定义的运动激励。利用ADAMS/View 提供的对象测量功能,得到机器人6个电动缸的伸缩量、速度、加速度变化曲线如图4以及机器人在 x,y,z方向上的位移、速度、加速度变化曲线如图5所示。

图4 6个气缸的伸缩量、速度、加速度随时间变化图
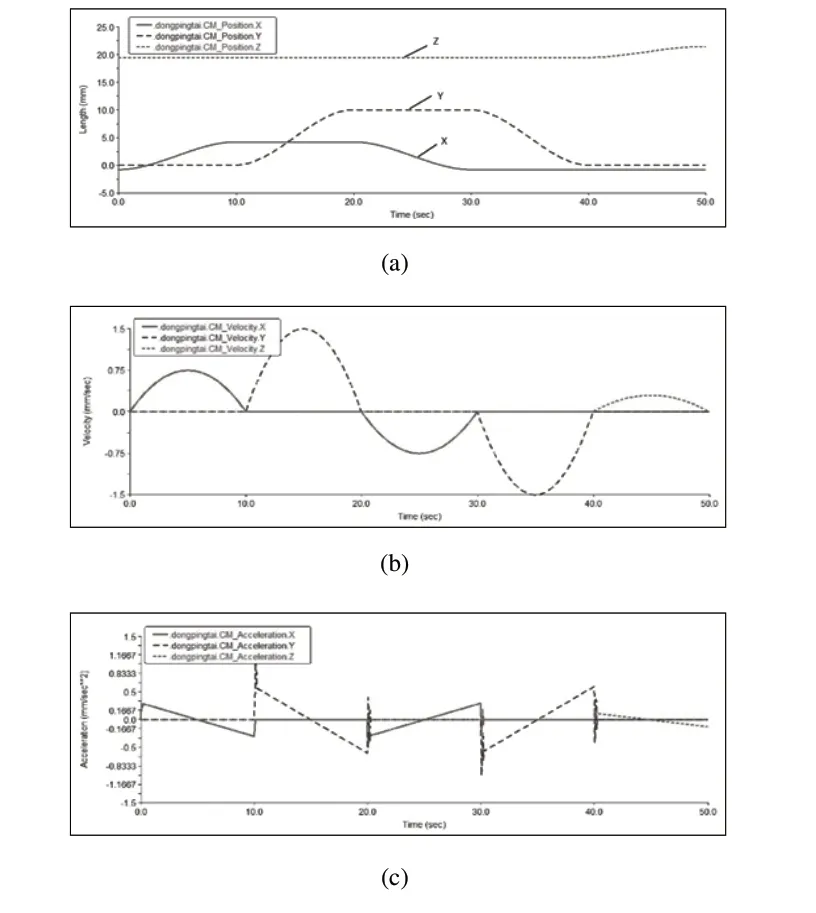
图5 机器人在三个方向的位移、速度、加速度随时间变化图
3.2 仿真结果分析
从气缸伸缩量随时间变化图(图4(a)可以看出,机器人在上移过程中,气缸2、4、5作为主支撑上移缸伸缩量数值变化明显,气缸1、3、6作为辅助上移缸伸缩量数值变化相对较弱,与实际情况相符合,说明整机设计比较合理。与此同时,根据图中气缸位移的最高与最低点,可以计算得到气缸的伸缩量,为气缸的选取提供理论参考。在图4(b),图4(c)气缸速度与加速度图中,6个气缸速度与加速度数值保持同步,说明能较好地满足清洁机器人在清洁过程中稳定要求,图中的数值变化可为气缸的伺服电机的选取提供数据。
机器人在3个方向的位移随时间变化图(图5(a))可以看出:z轴位移保持不变,说明机器人吸附稳定,没有出现由吸附不稳而坠落的可能;y轴有明显的上升,下降和平稳的状态,说明机器人可以实现在壁面上上下移动,以及机器人平稳时进行清洁过程,可实现清洁机器人的吸附移动与稳定清洁的功能;x轴有稍许波动,应是在机器人移动过程中有左右摇摆的可能,但并不影响整体效果。从整体看来,设计符合实际的高层建筑清洁的过程与要求。机器人在三个方向速度与加速度随时间变化图(图5(b),图5(c),图中可以得到机器人在x,y,z三个方向上的运动规律与位移规律是一致的,再次验证机器人工作过程中符合理论规划,满足设计要求。
4 结论
通过对六足高层建筑清洁机器人进行运动仿真,仿真结果表明:该清洁机器人结构合理、控制容易,能够达到预先设计的运动要求。在清洁机器人3个方向的位移随时间变化图中可以观察到机器人运动仿真过程中还存在一定的问题,如,在上移过程中有x轴有稍许波动,这表示机器人在上移过程中有左右摇摆的可能,需要进一步的优化运动学仿真中的驱动函数。通过 ADAMS强大的后处理模块,得到了机器人的运动学特性与数据,为其样机的研制提供参考依据。
