Φ0.5米高超声速风洞连续变攻角测力试验数据处理方法研究
2019-08-29
(中国空气动力研究与发展中心 高速空气动力研究所,四川 绵阳 621000)
0 引言
风洞是一种产生可控均匀气流的管状试验装置,用于模拟飞行器在不同飞行高度和速度条件下的气动力现象。风洞测力试验是指通过应变天平测量气流作用在模型上的气动力试验。风洞常规测力试验技术采用模型阶梯运行的方式,模型运行到指定攻角后,通知数采系统完成采集,然后模型运行至下一攻角,依次循环完成所有攻角的采集。连续变攻角测力试验中模型攻角连续运行,期间对模型攻角、模型所受气动载荷、流场参数等动态变化信号进行高速连续采集,数据处理前先对动态信号进行滤波及同步处理,然后对各种非气动载荷进行修正,最后计算得到气动载荷和气动系数。常规测力试验结果为离散点数据,而连续变攻角测力试验数据攻角间隔小,数据内外插值精度更高,更能准确反应飞行器气动力特性[1],同时模型连续运行减少了模型攻角控制系统走停加减速及通讯占时,可以极大地缩短风洞试验的时间,提高试验效率,降低风洞运行成本,因此该试验技术在低速及高速风洞得到了较为广泛的应用[2-4]。
连续变攻角试验技术数据处理主要存在以下两个问题:天平、压力传感器、温度传感器与攻角传感器自身响应特性及对信号调理设备的响应不一致,造成攻角与模型气动系数不匹配;模型自重,模型加减速及匀速运行过程中存在的惯性力及离心力,气动滞后,均会对试验结果产生影响。因此无法直接使用连续变攻角测力试验数据进行计算,需要对试验数据进行修正。
近年来Φ0.5米高超声速风洞成功建立了连续变攻角测力试验技术[5],针对连续变攻角试验中天平信号延时、天平支杆弹性角、模型自重、模型惯性力和离心力等影响因素,提出了系统的数据修正与处理方法,取得了良好的应用效果。
1 总体方案
Φ0.5米高超声速风洞连续变攻角试验及数据处理流程如图1所示。首先采集自重数据和试验数据,流程与常规测力试验类似[6],即静态无风条件下模拟动态试验过程中模型运行轨迹,保持模型攻角控制系统加减速度及运行速度一致,采集得到自重数据,之后进行风洞试验,获取试验数据。然后计算天平各分量数据与攻角数据的互相关函数[4],计算延时修正量,互相关函数计算使用静态条件下模型周期运行过程中采集到的数据。最后进行数据修正与处理,主要包括数字滤波、延时修正、支杆弹性角修正、攻角插值、模型自重修正、模型离心力与惯性力修正、气动力及气动系数计算等步骤。
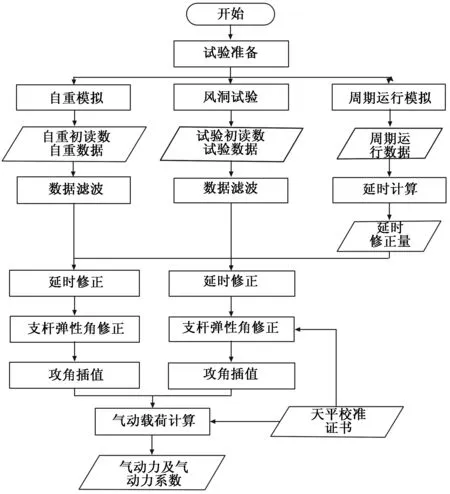
图1 连续变攻角试验及数据处理流程图
2 硬件系统
Φ0.5米高超声速风洞连续变攻角测量系统组成如图2所示,包括天平、热电偶、压力传感器、倾角传感器、攻角编码器等一次仪表,Preston 8300XWB前置信号调理器,数采系统和工控机等组成[7]。PXI数采系统选用泛华测控PS PXI-9108机箱,嵌入式控制器为PS PXI-3050;数据采集卡为NI PXI-6289,18位,采样率多通道共享625 KS/s,32路单端或者16路差分输入,2路计数器输入;DIO卡为PS PXI-3305卡,DI与DO各32路。各类传感器的模拟信号输出经信号调理后以差分接线方式输入数采系统,攻角信号采用攻角控制系统的光电编码器反馈信号,由数采系统的计数器采集,倾角传感器安装于模型支撑机构侧面,采用间接测量攻角的方式,误差较大,主要用于攻角监测。
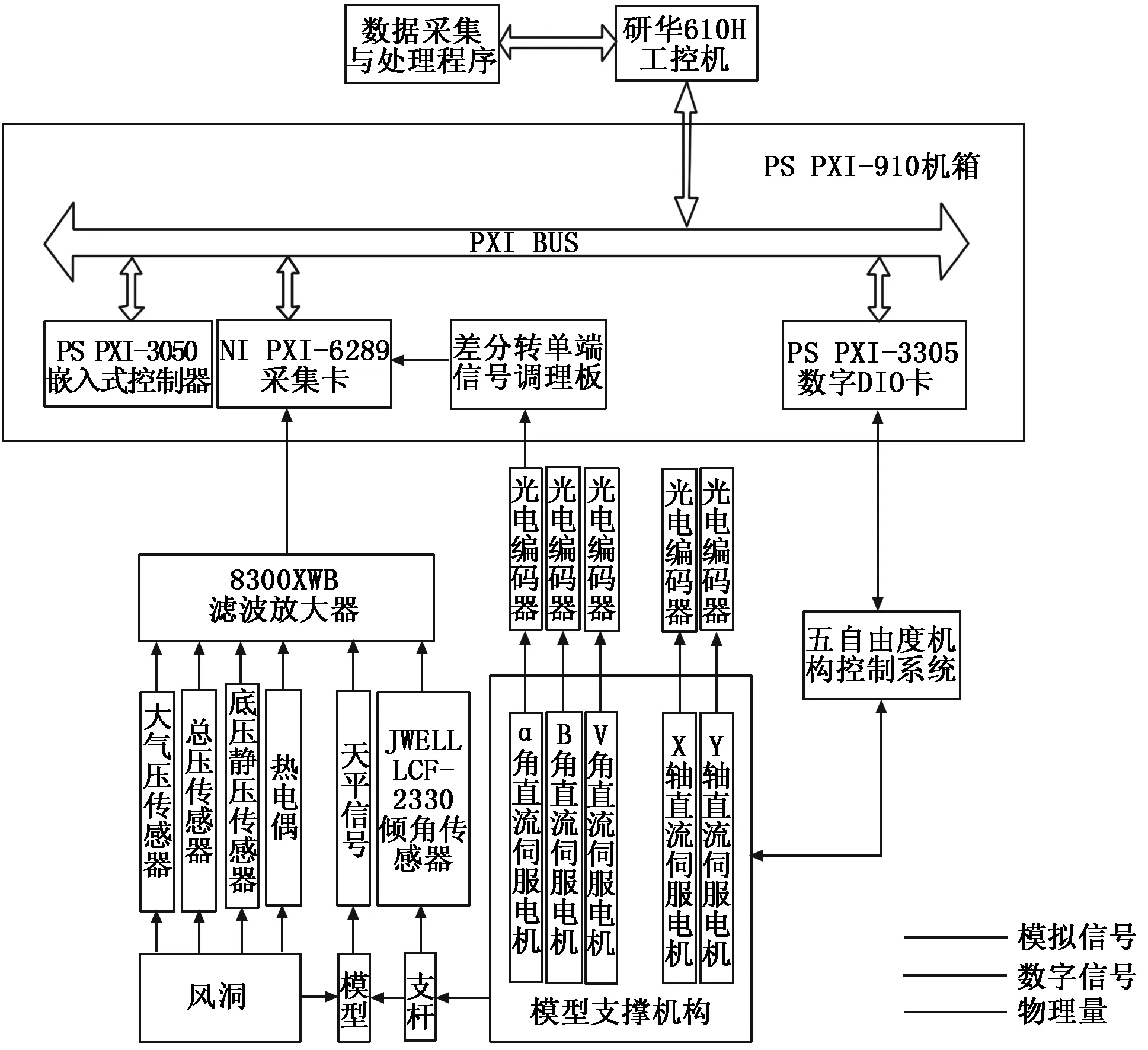
图2 连续变攻角测量系统结构图
3 连续变攻角试验数据修正方法
3.1 数字滤波
由于风洞现场信号传输距离较长,且天平应变片输出为毫伏级电压信号,易受空间电磁干扰和共模干扰的影响。虽然各信号使用双绞屏蔽线缆传输并经过了信号调理设备的低通滤波,为抑制干扰提高测量精度,确保试验数据质量,仍需对采集数据进行数字滤波处理。为消除数字滤波后的延时,使用一种无延时滤波器[8],对模拟信号数据进行低通滤波处理,滤波公式为:
Y(z)=X(z)H(z)H(z-1)
(1)
H(z)为三阶Butterworth低通滤波器,截止频率为2Hz。首先用设计的滤波器H(z)对原始信号X(z)进行滤波,得到的结果X(z)H(z)在时域上翻转,变为X(z-1)H(z-1)后,再用同样的滤波器H(z)进行滤波,将得到新的处理结果X(z-1)H(z-1)H(z),在时域上翻转回来,由此得到X(z)H(z)H(z-1)。使|z|=1,即z=ejω,则输出结果为X(ejω)|H(ejω)|2,经过该滤波器的信号相位无变化,滤波器阶数为六阶。信号滤波前后对比结果如图3所示,可以看到噪声得到了有效抑制,数据更为平坦。
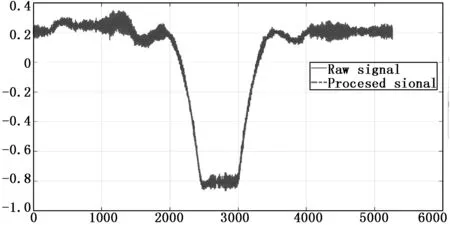
图3 滤波前后数据对比
3.2 天平数据同步修正
无量纲的气动系数为测力试验的最终结果,计算公式如式(2)所示。式中C为气动系数,包括轴向力系数、法向力系数、横向力系数、滚转力矩系数、偏航力矩系数、俯仰力矩系数,F为气动载荷;q为动压,与流场参数中的马赫数、总压与总温有关;S为气动系数,Li为气动参考长度,均为模型参数。
(2)
由式(2)可知,对于同一模型,气动系数由气动载荷及动压决定,而动压由流场参数计算得到。对高超声速风洞试验来说,动压由马赫数、总压及总温计算得到,马赫数由喷管形面确定,试验中为固定的参数,因此主要考虑总压及总温对动压的影响。在规定的模型阻塞度及运行攻角范围内,模型攻角变化对风洞总压及总温控制精度产生影响较小,模型攻角与总压及总温的相关性较弱。且在控制精度范围内的总压及总温波动对动压的影响可以忽略[9],因此可不对压力传感器及温度传感器数据进行同步修正,主要修正对象为测量气动载荷的天平数据。风洞测力试验结果是模型在不同攻角下的气动力系数,因此以模型攻角数据为基准,将天平数据修正到与攻角数据相同的时间序列,同步修正包括延时计算和修正两个步骤。
延时计算基于互相关函数原理,假设两个平稳随机信号x(t)和y(t),两信号的互相关函数Rxy(τ)由式(3)计算得到,用于描述信号x(t)和y(t)在任意两个不同时刻的相关程度。基于互相关函数的性质原理,假设x(t)是系统的输入信号,y(t)是系统输出,互相关函数Rxy(τ)最高峰值处的τ就是该系统的滞后时间,即信号x(t)相对y(t)的时间延时。
(3)
为提高修正量计算精度,使用模型多周期运行数据提高互相关函数的峰值。模型运行攻角设置原则是在试验最大攻角和最小攻角两端保留一定余量,便于延时修正及数据插值,避免数据截断,如试验需求模型运行-4°~14°,则运行攻角设置为-4.5°~14.5°。考虑到气动滞后的影响,模型运行速度不宜过快[2],经调试确定加减速速率设置为5°/s2,攻角运行速度为3°/s。风洞无风状态下,模型按设定攻角范围连续运行若干个周期,其中1个周期为:最小攻角—>最大攻角—>最小攻角,运行过程中采集攻角及天平各分量数据。离散数据间互相关函数计算公式如下:
Rαbi(n)=α(n)*bi(n)
(4)
α(n)为攻角数据,bi(n)为天平各分量数据,i=1、2…6,N为α(n)与bi(n)的序列长度,Rαbi(n)长度为2N-1。找出Rαbi(n)中的最大峰值所处坐标di,延时修正量即为di-N。延时修正量如小于0,则bi(n)相对α(n)滞后,如大于0,则bi(n)相对α(n)超前。
在空中盘旋的二十分钟里,我听到了一个悲伤的故事。教练告诉我,迟羽和七哥结婚后的第二年,在一次常规飞行中出了事故。
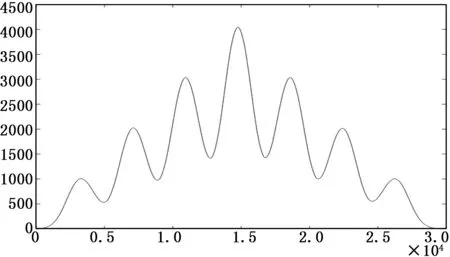
图4 攻角与天平信号互相关函数
图4为攻角信号与天平俯仰力矩输出信号的互相关函数,得到修正量为-3,即天平信号滞后于攻角信号3个数据点。测试发现,天平在不同信号调理设备低通滤波频率下的修正量存在差异,不同天平的修正量也不相同,这是由于滤波器相位延时及天平响应时间差异造成的,因此更换天平或信号调理设备的滤波频率后需要重新计算修正量。
3.3 支杆弹性角修正
受模型气动载荷及自身重量影响,天平支杆会产生变形,模型实际攻角与运行攻角存在差异,因此需要对支杆弹性角进行修正。使用自重数据、试验数据和天平校准文件分别计算得到模型在自重及试验状态的支杆弹性角,结合模型运行攻角、支杆弹性角、天平轴系与模型体轴系的关系可以计算得到模型的实际攻角[6]。
3.4 模型自重、离心力及惯性力修正
不同模型攻角状态下,天平均会受到模型自身重量的影响,需要对自重产生的力和力矩进行修正。同时模型攻角控制系统在运动过程中,天平测量会受到离心力及惯性力的影响,当模型以固定角速度ω运行时,会产生作用于天平纵轴的离心力,影响轴向力的测量。由于攻角系统启动及停止时的加速和减速运动,以及运动过程中的不平稳,还会存在角加速度dω/dt,由此引起的惯性力会影响法向力和俯仰力矩的测量结果。
自重状态下,天平所受的力和力矩为:
F1=Fg+FI1
M1=Mg+MI1
(5)
模型在风洞流场中运行时,天平所受的力和力矩为:
F2=Fg+FI2+FA
M2=Mg+MI2+MA
(6)
式中,Fg、Mg为模型自身重量引起的力或力矩;FI1、MI1为自重模拟时,模型运动的惯性力或惯性力矩;FI2、MI2为试验过程中,模型运动的惯性力或惯性力矩;FA、MA为试验中模型所受的气动力或气动力矩。
因模型攻角控制系统的运行重复性能良好[10],自重及吹风状态在相同攻角时,可认为模型所受离心力及惯性力是一致的,即:
FI1=FI2
MI1=MI2
(7)
通过扣模型自重的方式即可同时对离心力及惯性力进行修正,由式(5)与式(6)相减得到气动力和气动力矩:
FA=F2-F1
MA=M2-M1
(8)
天平输出信号的增量与所测力与力矩成正比,因此可根据式(8)对天平输出信号进行修正。需要注意的是自重及吹风状态的攻角数据为两次模型运行的结果,往往不一致,扣模型自重前需对天平数据进行等攻角间隔插值,插值后自重数据与试验数据按攻角一一对应。上述修正方法对模型攻角控制系统的重复定位精度及运行稳定性要求较高,为保障数据修正精度,试验前需要对攻角运行曲线进行对比分析。
4 试验与分析
4.1 数据处理流程
保持模型攻角系统和采集系统参数一致,在风洞无风条件下采集自重初读数B0和自重数据B和αB,在风洞有风条件下采集试验初读数A0和试验数据A和αA。A0和B0为无气流条件下模型攻角零度时天平的输出,分两次采集初读的目的是消除天平输出漂移的影响,A和B为模型运行过程中的天平信号,αA和αB为攻角数据。
通过静态模拟得到天平数据的延时修正量,A和B经过滤波与延时修正后为Afc与Bfc,经过数字滤波与弹性角修正后的攻角数据为αAfm、αBfm。按αAfm、αBfm分别对Afc与Bfc进行插值,插值区间与间隔一致,插值结果为Afci和Bfci。根据式(9)计算得到天平各分量的信号增量D。
D=(Afci-A0)-(Bfci-B0)
(9)
根据D及天平校准文件计算得到气动力和力矩,该结果已修正模型自重、离心力及惯性力的影响,最后结合风洞流场参数即可计算得到模型气动力系数。
Φ0.5米高超声速风洞连续变攻角数据处理软件基于Matlab2010b开发,GUI界面如图5所示,主要功能包括:参数设置、时频域分析、数据预处理、流场参数及气动系数计算、曲线显示等功能模块。包含连续变攻角测力试验数据修正功能,同时具备常规阶梯及连续变攻角测力数据处理功能。
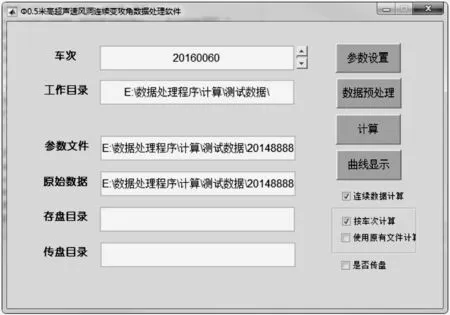
图5 Φ 0.5米高超声速风洞连续变攻角数据处理软件
4.2 试验结果分析
为验证修正方法的有效性,开展了连续变攻角与常规阶梯的对比试验,试验使用HB-2(Φ70)标模,试验运行攻角范围-4~14°,常规阶梯试验攻角数为12个。数采系统采样率为200,信号调理设备低通滤波截止频率为1 Hz,攻角插值间隔为0.01°,试验马赫数为5、7、9。经过延时计算,连续变攻角试验的天平数据延时修正量见表1,滤波截止频率为1 Hz时延时修正量大于10 Hz,表明天平信号在10 Hz滤波频率下的攻角跟随能力优于1 Hz,但10 Hz滤波时存在信号噪声显著增大的情况。假设不对延时进行修正,根据采样率及攻角运行速度,可知天平各分量对应的攻角偏差为0.6°(1 Hz)和0.045°(10 Hz),结果曲线会出现不同程度的水平平移。

表1 天平延时修正量
根据气动力及流场参数,可得到无量纲化的气动力系数,其中法向力系数(CN)、轴向力系数(CA)、俯仰力矩系数(Cm)为随攻角变化的主要气动力系数,结果对比如图6所示。由图可知连续变攻角试验结果与常规阶梯试验结果重合较好,其中马赫数5时基本重合,CN、CA、Cm最大差量分别为0.0065,、0.0011、0.0075,满足试验精度要求[9];高马赫数7和9时,小攻角数据差量较小,但大攻角数据的差量有随攻角变大的趋势,马赫数9时最大攻角14°条件下,差量分别为0.0142、0.00412、0.01056。大攻角差量较大的原因是连续变攻角试验模型在风洞高温气流中运行的时间是常规测力试验的1/3,天平温度效应较小,且由于高马赫数总温更高,常规测力试验大攻角时温度效应更为显著,导致差量有放大的趋势。
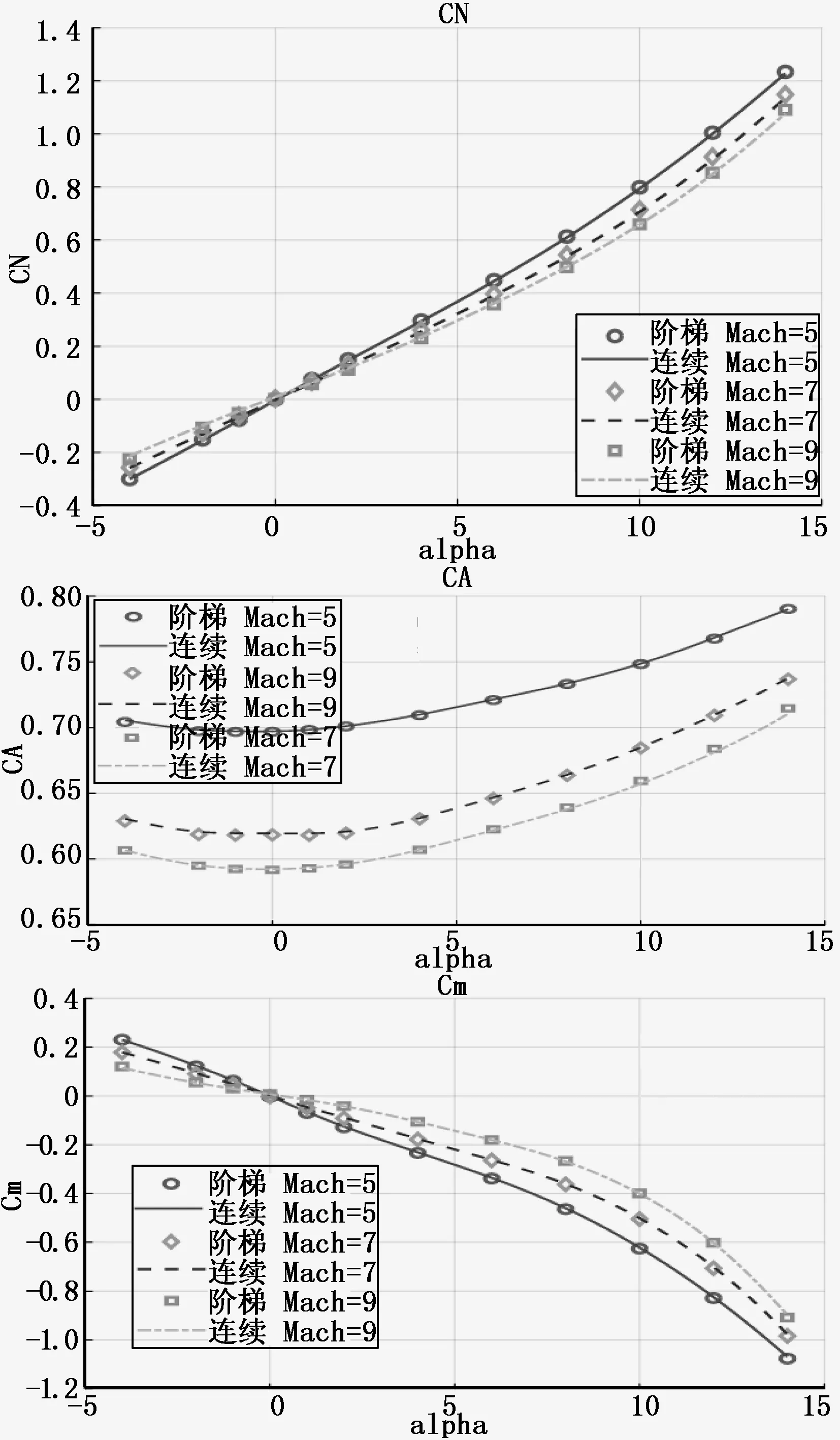
图6 连续变攻角与常规阶梯试验结果对比
为证明上述结论,开展了温度效应试验,具体方法为:仍采用常规阶梯试验方式,但减去小攻角的试验阶梯,使模型运行到最大角度14°时所耗费的时间同连续变攻角方式基本相同,然后在14°时定攻角采集几组数据,直至采集完最后一组数据所耗费的试验时间同常规阶梯试验方式运行到最大攻角耗时基本相同。结果对比如图7所示,温度效应试验第一组结果同连续变攻角结果基本相同,随着时间的推移,天平温度效应增大,量值向常规阶梯试验结果靠近。马赫9时由于气流温度更高,温度效应试验模型大攻角保持时间较长,随着时间的推移,相对常规阶梯试验温度效应更为显著,与常规阶梯结果先接近然后又逐渐产生偏差。通过对比可知,连续变攻角与常规阶梯试验结果在大攻角时的差量主要是由天平温度效应导致的。
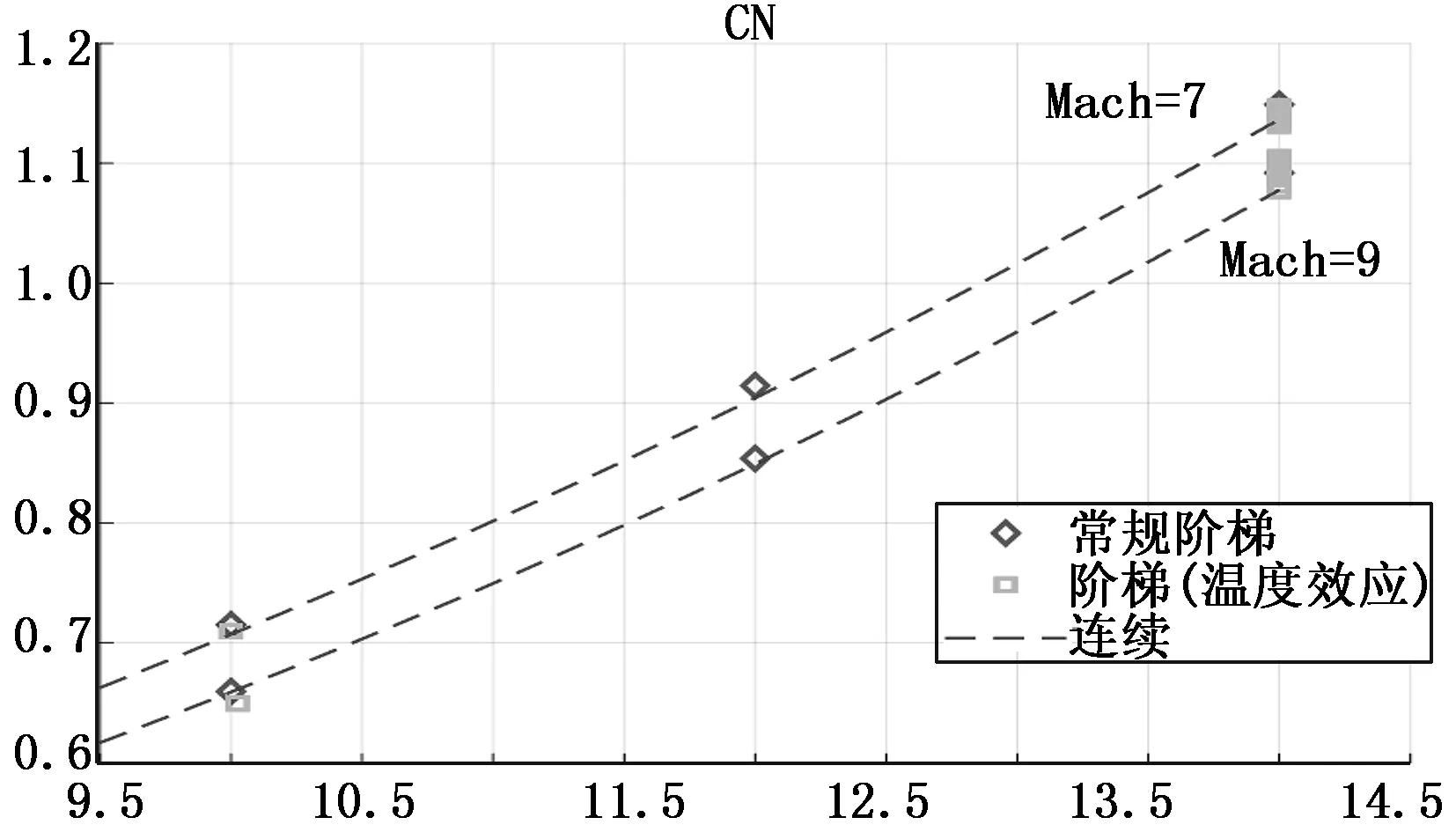
图7 天平温度效应验证试验结果
5 结束语
连续变攻角试验技术相对阶梯试验技术具有试验时间短和数据丰富的优点,针对Φ0.5米高超声速风洞连续变攻角测力试验技术数据处理需求,提出了连续变攻角试验数据采集及处理流程。运用无延时数字滤波器对信号各类噪声进行有效抑制,提出了静态条件下天平信号延时计算及修正方法,针对支杆弹性角、模型自重、加减速运行过程中产生的离心力和惯性力提出了系统的修正方法。
验证试验表明,连续变攻角试验结果与阶梯试验结果吻合较好,由于连续变攻角试验模型在气流中的运行时间缩短为常规风洞试验的1/3,可有效减小高马赫数条件下的天平温度效应。温度效应试验还表明模型在高温气流中的时间越长,暴露的面积越大,天平温度效应越显著。因此温度效应成为影响试验精度的重要因素,为改善测力试验精度,后续需就天平温度补偿展开进一步研究工作。
