基于APT控制技术的Ku/Ka双频机载动中通系统设计
2019-08-29郗小鹏张
郗小鹏张 勇
(1.天津航天中为数据系统科技有限公司,天津 300301; 2.航天恒星科技有限公司(503所),北京 100086)
0 引言
随着航空用户对上网需求的不断提高以及全球智能手机保有量的持续增加,欧、美和亚洲卫星通信公司均研发出能安装到航空飞机的机载动中通设备,解决飞行中信息孤岛问题,为航空成员提供良好带宽通信服务。航空接入互联网将成为航空公司未来品牌和服务竞争重点[1]。
国际航线遍布全球,为适应不同地理位置、不同卫星的有效全向辐射功率(Effective Isotropic Radiated Power,EIRP)值的变化,根据用户需求开展了Ku/Ka双频、双天线机载动中通样机研制工作。系统采用捕获、瞄准、跟踪(Acquisition Pointing and Tracking,APT)控制技术[2-5],APT控制技术是卫星通信核心技术之一,其融合了惯性导航及精准伺服控制技术,对伺服控制精度、控制带宽有着决定性的影响。其直接决定了通信链路能否建立以及通信系统性能。系统本着最佳带宽服务理念,采用先进的APT控制技术,实现Ku/Ka双频、双天线在不同扰动下快速对星与切换,保证通信正常可靠,为航空用户提供高速上网体验。
1 系统功能及组成
APT控制系统能够根据自身和目标卫星信息,并结合载体姿态信息完成天线初始对准卫星,然后通过陀螺稳定和信标极值跟踪等方式相结合,保证机载终端与卫星连续不间断通信。系统具有三种工作模式:手动指向、程序指向、动态跟踪;可根据机载计算机控制指令进行模式切换。
本文结合项目研制需求开展了机载动中通研发设计,伺服机构采用方位-俯仰型结构形式,方位、俯仰电机采用齿轮传动完成卫通天线两个自由度的转动,并通过各自的传动轴带动方位、俯仰编码器转动,采集方位和俯仰轴位置信息并发送至APT控制系统,采用APT控制技术提高系统的快速响应能力。
通过理论计算、有限元仿真、结构设计保证结构配比均衡,整体结构刚度和精度的同时实现双天线机载卫通高转矩、低回差、轻量化和高定位精度。基于APT控制技术的Ku/Ka双频机载动中通系统组成如图1所示。

图1 基于APT控制技术的ku/ka双频机载动中通系统组成框图
从图中可以看出,ku、ka双频、双天线机载动中通主要由模块管理器(Module Manager,ModMan)和天线子系统组成。天线子系统包含Ku/Ka射频单元(Ku/Ka-band Radio Frequency Unit,KRFU)、外部天线单元(Outside Antenna Equipment,OAE)、Ku/Ka天线控制单元(Ku/Ka-band Aircraft Networking Data Unit,KANDU)三大核心部件;KANDU由方位电机、方位编码器,俯仰电机、俯仰编码器,APT控制系统,姿态参考模块等组成;姿态参考模块主要对其内部高精度陀螺仪、加速度计、磁力计等传感器数据进行互补滤波、漂移补偿及数据融合。
基于APT控制技术的控制系统的主要功能为通过机载惯性和姿态参考模块构建姿态测量单元,将惯性技术及伺服控制技术有机结合,采用电机、驱动器、陀螺、编码器、传动机构等构成伺服稳定控制回路实现天线在惯性空间稳定。同时融合机载GPS位置信息、姿态参考模块输出的姿态信息、信标接收机的信标值,先分别将各种数据进行卡尔曼滤波算法,然后对数据进行融合、解算,保证天线稳定,正常通信[6-9]。控制天线始终指向目标卫星,以最佳带宽服务理念,保证通信链路快速建立及稳定。
方位、俯仰思路基本相同,基于APT控制技术的控制系统采用PID控制算法实现系统闭环控制,系统有方位、俯仰2个稳定控制回路,每个回路包括速度和位置稳定环路,图2为俯仰框稳定控制环路图。用陀螺隔离载体扰动,提高系统稳定性。对角速率进行积分后输入位置环进一步提高系统稳定精度,电流环可提高系统抗负载能力,位置环可提高伺服控制精度,可保证动中通完成响应输入指令和抑制扰动的任务,具备较高的稳定精度。
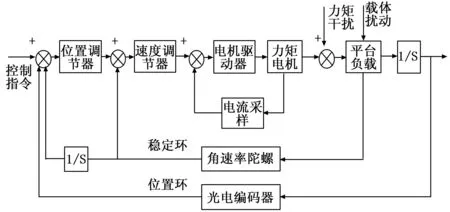
图2 俯仰框稳定控制环路
2 系统硬件设计
2.1 原理设计
APT控制系统以数字信号处理器(Digital Signal Processing,DSP)TMS320F1812为控制核心搭建硬件平台,采用高精度、高动态控制算法,构建高可靠性APT控制系统。选用直流无刷电机作为伺服驱动元件,绝对式编码器作为位置反馈元件,姿态参考模块最为角速度反馈元件。同时利用机载惯导获得飞机航向信息及姿态信息,并融合GPS、信标机和姿态参考模块数据,完成ku/ka双频、双天线机载动中通的稳定卫星跟踪。基于APT控制技术的动中通控制系统硬件原理图如图3所示。

图3 APT控制系统硬件原理图
从图中可以看出,DSP作为APT控制系统的主控核心,接收信标机、姿态参考模块、机载惯导等数据并进行滤波补偿、数据融合,并根据姿态参考模块输出的姿态信息进行姿态解算,以此构建陀螺稳定平台。该系统采用程序指向+动态跟踪控制策略,以最优控制算法完成Ku或Ka天线的精确指向及高动态卫星跟踪。
2.2 系统可靠性设计
机载卫通在研制阶段借鉴成熟车载、船载动中通设计经验,采用成熟技术,系统从可靠性、维修性、保障性、安全性、环境适应性、电磁就爱内性等多方面进行系统设计,通过各项环境试验验证可靠性,剔除早期故障。
在元器件选型、样机软、硬件研制过程中严格把控质量。结合电磁兼容相关标准,系统在方案设计阶段就充分考虑机体复杂环境中电磁干扰(Electro Magnetic Interference,EMI)对机载动中通的影响。方案论证阶段重点在器件选型、单板设计、系统接地、结构及线缆电磁屏蔽、电源及接口电路滤波、瞬态骚扰抑制等不同层次设计阶段仔细考虑,规避后期整改风险。机载电源输入端采取隔离、滤波等措施,避免通信系统对飞机造成故障。
3 系统软件设计
3.1 软件设计思路和编程方法
APT控制技术可分为程序指向及动态跟踪两种控制策略。采用坐标变换、姿态结算、数据融合、步进跟踪等多项关键技术,APT控制系统可根据机载调制解调器信息完成Ku或Ka天线程序指向及动态跟踪,并将状态信息实时回传到地面;现分别对两种控制策略进行详细解释,主要内容如下:
1)程序指向策略:
一键对星指令下发后,APT控制系统根据输入目标卫星的经、纬度信息,融合载体GPS位置信息即可计算得到地理坐标系下卫通天线方位A、俯仰E、极化Apol指向角,如下所示:
(1)
式中,Φ为卫星与地面天线的经度差,θ为地面天线纬度。但上式求出的是以正南方向为基准的方位角,按规定方位角都是按正北方向,因此实际系统应用时需根据地面天线和卫星的所在位置进行准确应用。
从地理坐标系变换到飞机坐标系的变换表达式如下:
[Dj]=Mφ*Mθ*Mψ*[DM]
(2)
式中:
为目标在机体坐标系中的坐标矢量:
(3)
为目标在地理坐标系中的坐标矢量:
(4)
Mθ、Mφ、Mψ为由机载惯导提供的俯仰、横滚和方位姿态信息的3个变换矩阵;Ej、Aj分别为天线轴的俯仰角和方位角[10]。
通过坐标变换可以解算出相对载体坐标系中的动中通天线方位角、俯仰角和极化角,APT控制系统驱动极化电机、俯仰电机和方位电机驱动天线转动到响应角度,实现初始指向。
当飞机相对惯导空间有扰动速度ωb,通过框架传到动中通的三个框架,致使天线不稳定。通过运动学分析天线稳定的机理,得出隔离载体扰动的补偿方程。飞机扰动速度分解到各坐标轴的角速度分量分别为ωbx、ωby、ωbz,按照方位、俯仰坐标变换顺序进行分析如下:
1)当俯仰框不动,方位轴逆时针旋转ψ时,通过坐标转换得沿方位框坐标轴的角速度分量ωax、ωay、ωaz;
(5)
2)当方位框不动,俯仰框逆时针旋转θ角度时,通过坐标转换得沿俯仰框坐标下的角速度分量ωfx、ωfy、ωfz;
(6)
稳定控制系统实际工作时,输出补偿角速度分量ψ′、θ′,他们在俯仰框坐标系的分量为:
(7)
将式(6)与式(7)叠加得:
观察组总有效率(9 2.88%)明显高于对照组(80.87%),差异有统计学意义(P<0.05);观察组止血时间(24.55±5.31)h明显短于对照组(27.18±5.37)h,观察组输血量(1 2.11±3.1 2)μ明显少于对照组(15.47±4.46)μ,观察组48 h内再出血率(3.18%)明显低于对照组(26.17%),差异均有统计学意义(P<0.05);观察组55例中共有2例通过急诊胃镜下止血,1例转到外科治疗,对照组共有5例通过急诊胃镜下止血,11例转到外科治疗,两组均无死亡病例,不良反应均不明显。
(8)
当满足ωx=0、ωy=0、ωz=0时,就实现了天线稳定,此时得到补偿角速度方程为:
(9)
陀螺主要用来感知载体扰动变化,将三轴扰动速度给到APT控制系统,通过姿态解算算出三轴电机补偿速度,然后驱动三个轴电机分别进行动态补偿,减少载体扰动对卫星捕捉信号的影响。为了实现上述功能,需要通过陀螺坐标下下所敏感到的角速度ωbx、ωby、ωbz,得到方位、俯仰电机旋转信息或者需要补偿的信息量。
从式(10)可以看出,当飞机受到扰动时,陀螺会敏感到三个角速率ωbx、ωby、ωbz,稳定回路控制方位、俯仰电机绕分别以ψ′、θ′转动,当满足式(9)时,可隔离飞机的角运动干扰,从而实现天线稳定对星。
天线控制环路采用陀螺稳定控制技术弥补初始指向角度误差,保证惯性空间天线指向稳定。
2)动态跟踪策略:
由于姿态参考模块测量会存在一定误差,因此根据理论计算公式计算得到的卫通天线初始指向角度也会存在一定的角度误差,在外界扰动情况下就很难落在3 dB波束宽度范围内,因此还需采用一些闭环搜索算法。在完成天线的粗对准后,系统开启陀螺稳定模式,融合信标机输出的自动增益控制(Automatic Gain Control,AGC)值,进行双闭环跟踪,系统采用步进跟踪控制策略,完成天线的动态卫星跟踪[11],,从而克服惯导漂移等造成的指向偏差。
步进跟踪步距由天线和方向辐射的衰落获取,根据信标机接收信号的极值来控制天线微调。平板天线3 dB波束宽度方向图如图4所示。

图4 天线3 dB波束宽度方向图
θ3dB=Nλ/D
(10)
其中:N与孔径中场分布有关的参数。
初始对星后信标机接收信号能量可能大于系统门限值,但此时天线所处角度并非信标最大值点,融合姿态、信标值等多种信息进行细微步进角度调整即可保证接收到信号电平最大[12]。步进跟踪的工作原理为每隔一段时间,驱动卫通天线方位或俯仰运动一个很小的角度,通过对比步进前后信号电平大小来判断下一步步进方向和角度。若信号电平增大则继续在该方向上运动,否则,驱动天线反向运动。通过方位、俯仰两个方向上交替运动,使天线逐步调整到最佳角度。步进跟踪流程图如图5所示。

图5 步进跟踪流程图
3.2 软件实现流程
根据程序指向及动态跟踪控制策略分别进行软件流程图分析,卫通天线上电后首先进行主控芯片初始化,初始化结束后进入系统自检,自检流程如下:极化、俯仰、方位分别按照指标以最大速度、最大加速度扫过对应转动范围然后回归系统零位,自检过程中对电机、驱动器、编码器、姿态参考模块等模块及伺服指标进行功能检查,有故障及时上报;当自检顺利完成后通过载体姿态信息及目标卫星数据进行数据解算,得到方位、俯仰、极化指向角,驱动天线到达指定角度。
由于方位、俯仰波束角较小,驱动天线到达理论计算指向角度后,还需要让方位、俯仰在指向角度左右、上下进行小角度扇扫,保证指向在天线主瓣最大值点,此时信号电平达到锁定门限,系统进入动态跟踪模式。
当信号电平大于阈值电平后,系统进入动态跟踪模式,按照步进跟踪控制逻辑驱动天线到达信标极大值点,一旦由于某种原因信号电平小于遮挡电平,系统默认进入遮挡模式,则方位、俯仰立刻开稳保持当前角度不变,1min以内时刻判断信号电平大小。当持续时间大于1 min以后信号电平仍小于遮挡电平则进入程序指向模式重新指向。若1min以内信号电平大于遮挡电平则重新获取载体姿态信息,进入步进跟踪模式。
程序指向、动态跟踪软件流程如图6、7所示。
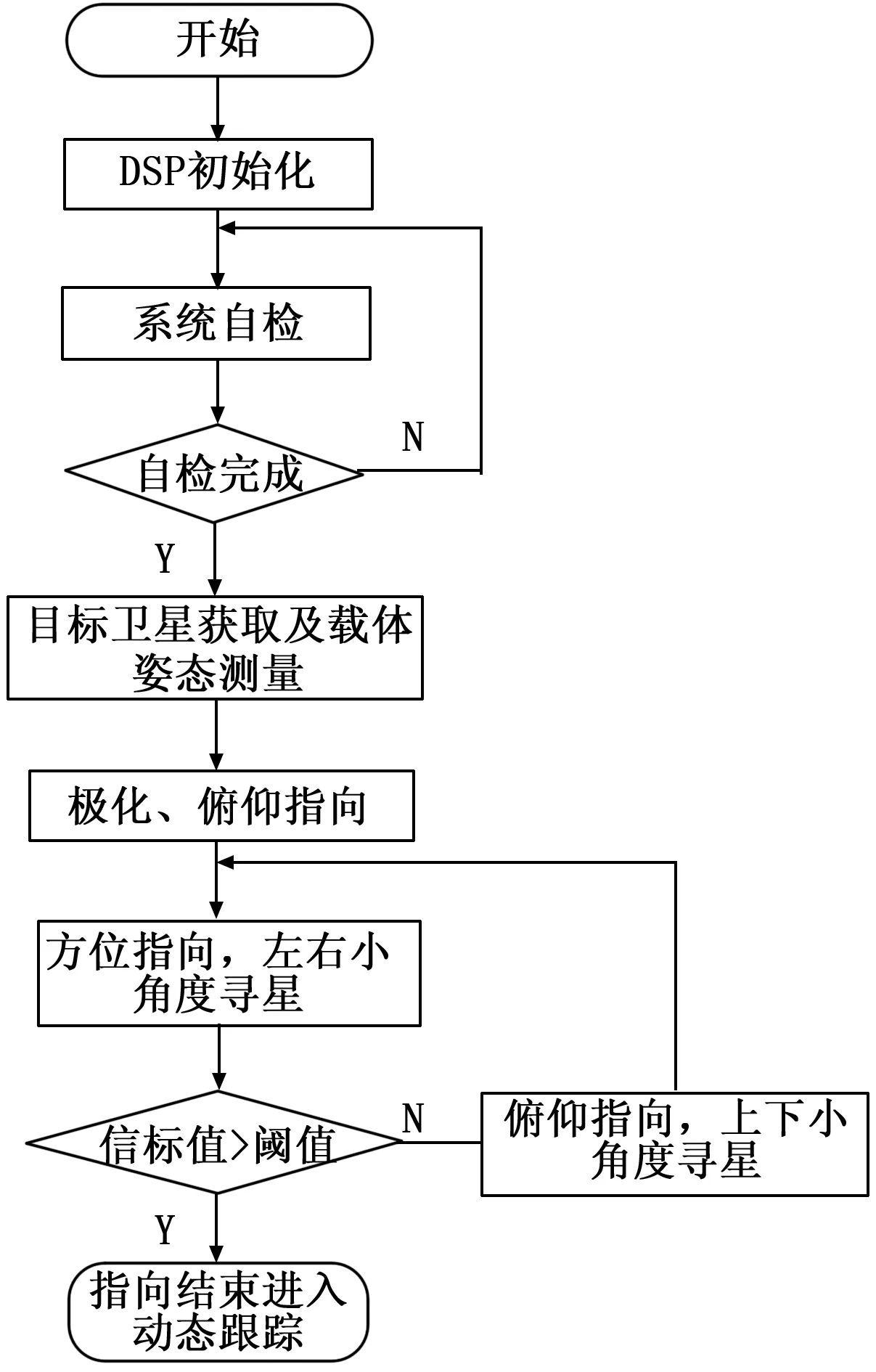
图6 程序指向软件流程图
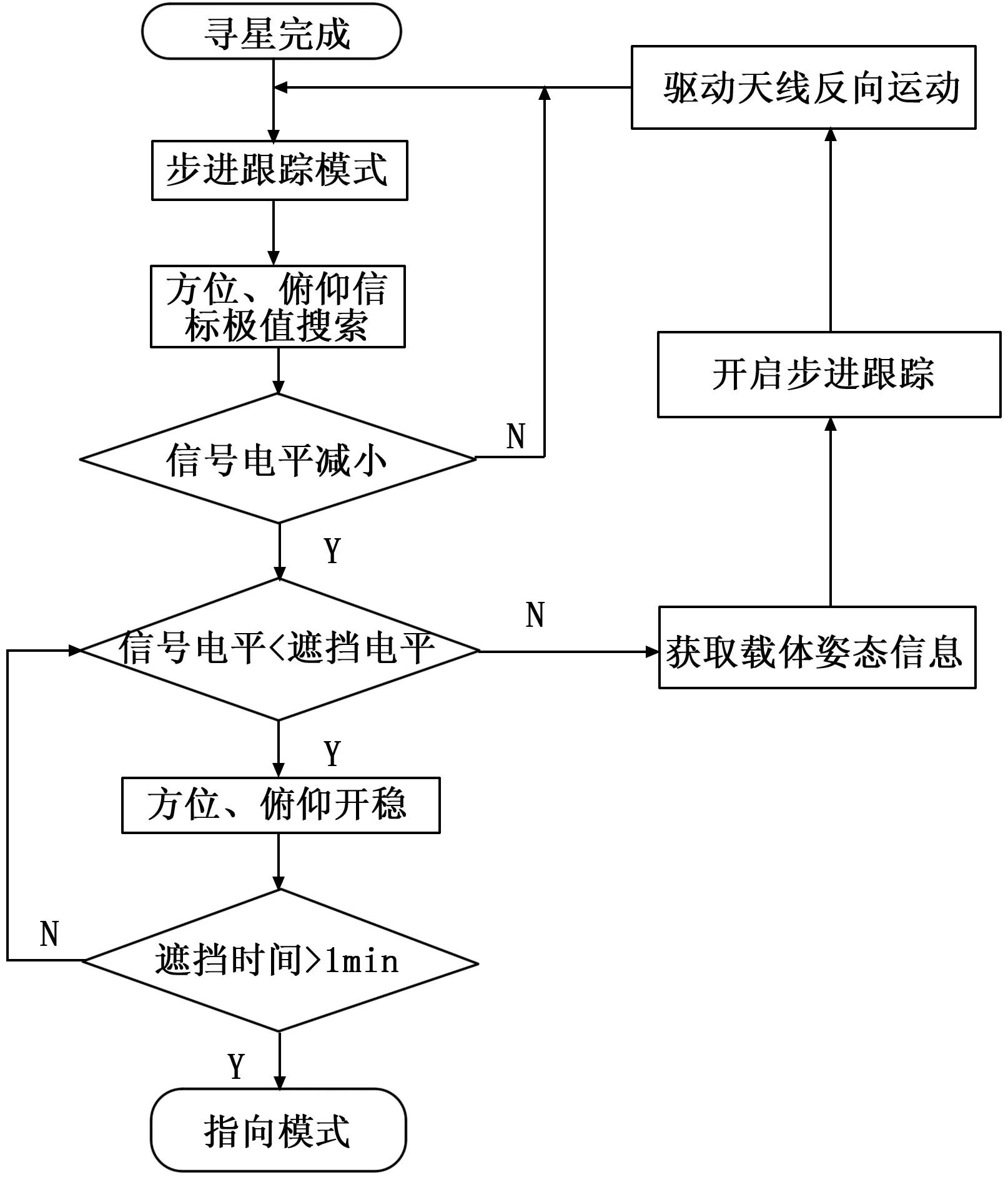
图7 动态跟踪软件流程图
4 实验结果与分析
工程样机研制完成后为充分验证机载动中通APT控制系统性能,对样机行了地面跑车模拟测试:主要包括不同路面行驶对星、换星测试,通过测试平坦、颠簸、圆盘、直线路面以及不同遮挡程度下动中通设备与固定站之间的通信质量,充分验证机载动中通复杂环境下卫星跟踪能力。跑车模拟测试系统图如下8所示。

图8 跑车模拟测试系统图
2017年4月由长征三号乙运载火箭成功发射中星16号卫星,首次在中国卫星上应用Ka频段多波束带宽通信系统。因此,行驶通信Ka天线选取中星16号卫星作为目标卫星,Ku天线选取中星10号卫星。通过记录不同运动状态下Ku/Ka天线对星时间、信标衰减和音视频通信效果等。试验记录表如表1所示。
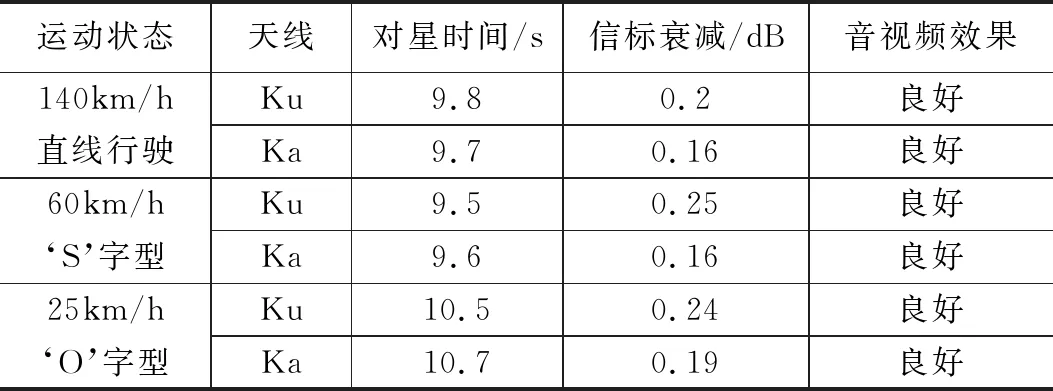
表1 行驶通信测试记录表
为充分验证机载动中通APT控制系统可靠性,对卫通天线进行了室外摇摆台卫星通讯试验,根据前期调研得知机载飞机在恶劣环境下飞机载体三轴最大频率可达1 Hz,摆幅最大可达8°;根据扰动频率和幅度可以得出机载动中通方位、俯仰最大扰动速度可达50°/s,最大扰动加速度可达315°/s2;因此,在对机载卫通前期设计阶段充分考虑伺服设计指标,保证余量充足。根据外界干扰指标,机载卫通伺服设计指标为方位、俯仰、极化跟踪速度80°/s,跟踪加速度600°/s2。可满足最大扰动干扰。为充分测试可靠性,对机载卫通施加三种不同正弦扰动激励,分别测试寻星时间及卫星链路锁定情况下天线稳定精度测试。摇摆台上位机界面如图9所示。

图9 摇摆台上位机界面图
三种不同外部扰动下Ku/Ka天线对星时间如表2所示。
系统采用步进跟踪和信标极值搜索方案,链路锁定情况下,方位、俯仰稳定跟踪精度可达0.2°有效值(Root-Mean-Square,RMS)以内;方位、俯仰稳定精度试验曲线如图10、11所示。
上述实验结果表明当系统给定8°/1 s、5°/1 s、2°/2 s不同扰动下,方位、俯仰稳定精度均保持在0.2°以内。该稳定精度符合设计要求,APT控制系统具有较快的卫星捕获及动态跟踪性能。机载动中通样机虽根据飞机扰动进行了地面跑车、摇摆台试验等基础性功能验证,但地面模拟环境与飞机实际飞行环境还存在一定差距,机载卫通系统还需进一步充分测试,机载卫通APT控制系统还需根据后期实际挂飞情况进行参数优化。

表2 不同正弦激励下寻星时间记录表
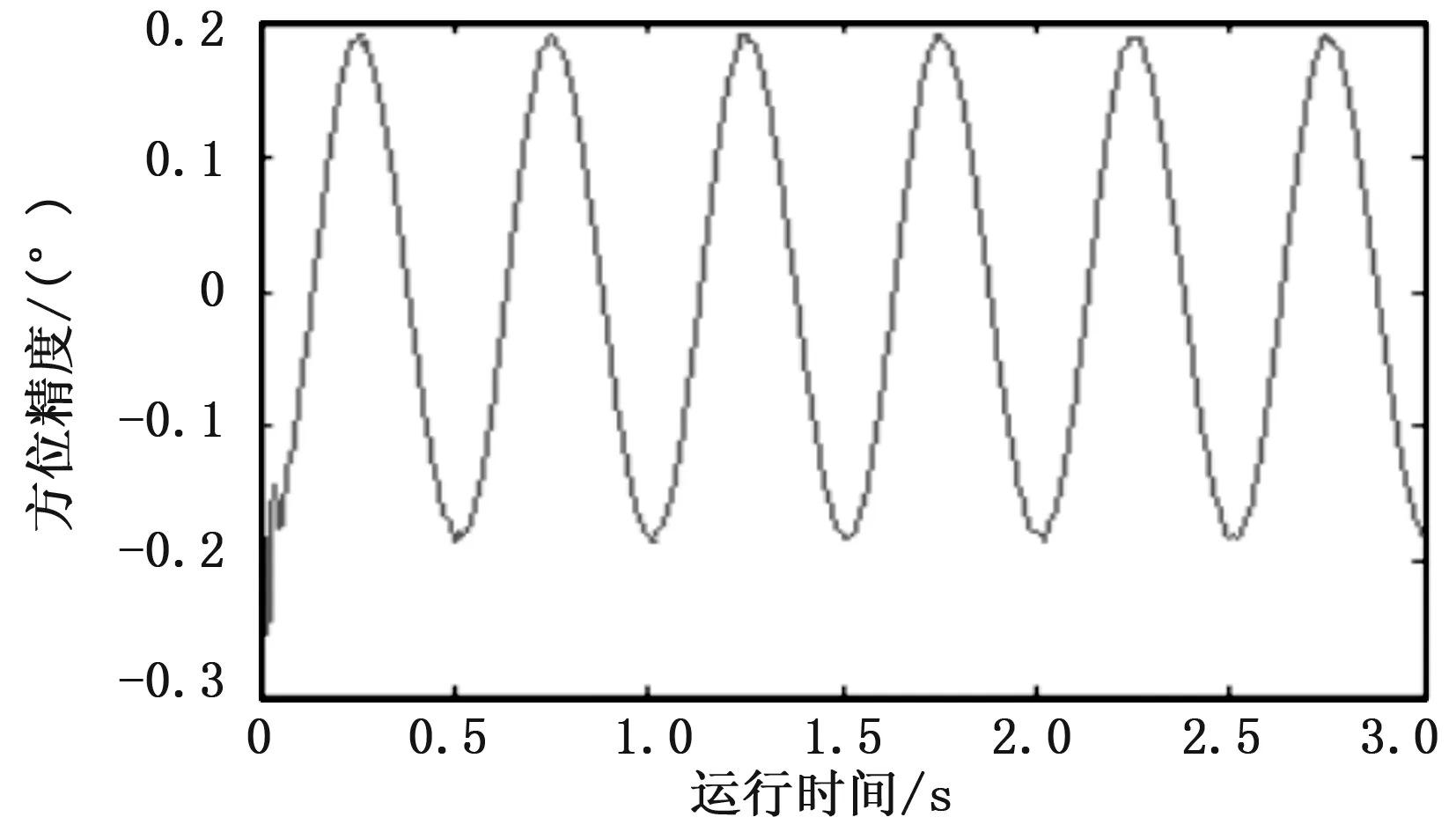
图10 方位稳定精度测试曲线

图11 俯仰稳定精度测试曲线
5 结束语
本文设计了一种基于APT控制技术的Ka/Ku双频机载动中通控制系统,该系统采用采用陀螺稳定、漂移补偿、多数据融合及精准伺服控制技术,通过各种复杂环境系统验证,不断对系统进行改进与优化,系统功能不断完善。在不同载体扰动情况下具有快速的卫星捕获与跟踪能力,能快速完成Ku、Ka天线之间的切换及对星。系统本着以最佳带宽服务理念,力争为航空用户提供高质量通信服务。
