带有输入时滞的领导跟随系统扰动抑制一致性
2019-08-29
(江南大学 自动化研究所,江苏 无锡 214122)
0 引言
近十年来,多智能体系统协同控制问题越来越成为控制界关注的焦点,这些系统在无人机编队协作,多机器人协作,卫星编队飞行,传感器网络等方面得到广泛应用[1-2]。 其中, 多智能体系统领导跟随一致性问题作为一个重要的协同控制问题同样是学者们关注的热点,其领导者不受跟随者影响, 且要求跟随者和领导者目标一致。 文献[3]基于M矩阵理论进行一致性收敛分析,讨论了采样数据框架下的一阶多智能体系统领导跟随一致性问题。文献[4]研究了一类二阶非线性多智能体系统的领导跟随一致性问题,利用相邻智能体之间的相对信息给出分布式自适应非线性控制率。
事实上,多智能体系统常常受到外部干扰的影响,使得一致性问题变得更具挑战性。目前,H∞鲁棒控制是最常见的处理干扰的方法,对抑制干扰简单有效。文献[5]对存在干扰和模型不确定参数的二阶多智能体系统,给出了鲁棒H∞一致性控制协议。文献[6]研究了存在干扰和模型不确定性的多时变时滞系统的鲁棒H∞一致性问题。 文献[7]对不确定高阶多智能体系统,讨论了满足L2-L∞性能指标下的一致性问题。文献[8]针对一类有时滞的Lipschitz非线性多智能体系统,设计动态输出反馈一致性协议使得多智能体系统满足H∞性能的平均一致性。 然而实际工程问题中的干扰往往是周期性的,对于这类干扰,一个有效的方法是基于观测器的估计信息设计控制器来消除干扰。 文献[9]基于干扰估计信息,针对存在外部干扰的二阶多智能体系统,提出了扰动抑制的一致性协议。文献[10]进一步研究了由外部非线性系统产生的干扰的二阶多智能体的一致性问题。 文献[11]针对存在外部干扰的二阶多智能体系统,给出了基于内模的自适应一致性协议。 文献[9-11]都是不考虑系统存在时滞的情况下研究多智能体系统的扰动抑制一致性问题。 然而一个实际的多智能体系统往往会伴随着时间的延迟,时滞的存在会影响系统的性能,甚至导致系统不稳定。 文献[12-13]通过预测时滞期间状态的变化来设计控制器,解决了线性系统存在时滞的问题。 针对文献[12-13]中设计的控制器包含过去控制输入积分的缺陷问题,文献[14-15]做了相应的优化和改进,并将该方法称为截取预测方法。文献[16]进一步用该方法解决了有输入时滞的Lipschitz非线性多智能体系统一致性问题。截取预测方法相对于传统的预测方法其优势在于设计的控制器中没有积分,使得设计的控制器便于实现,且能很好的弥补输入时滞造成影响,是解决输入时滞比较实用有效的方法。
目前,针对系统存在的外部干扰,基于观测器干扰估计信息设计一致性协议已经做了大量的研究,而同时考虑系统状态信息不可测且有输入时滞的研究比较缺乏。 因此,本文主要考虑状态信息不可测情况下,研究有输入时滞且存在外部干扰的多智能体系统领导跟随一致性问题。主要利用邻居智能体相对输出信息,给出能同时估计状态和干扰的观测器结构。然后发展了文献[14-15]中解决输入时滞的截取预测方法,并根据邻居智能体相对输出信息获得的状态估计和干扰估计设计一致性协议,其中,控制协议中干扰估计的引入对外部干扰有很好的抑制作用。为保证系统稳定性,除使用李雅普诺夫方法进行稳定性分析外,同时考虑Krasovskii 泛函处理系统存在的积分项,给出描述闭环系统稳定性充分条件的线性矩阵不等式(LMIs)。最后,用一个仿真例子来验证所得结果的有效性。
1 预备知识
引理1[17]:0是拉普拉斯矩阵L的一个特征值,1作为对应的右特征向量满足L1=0。矩阵L其余特征值均有非负实部。
引理2[15]:存在一个正定矩阵P,并且x∈[λ1,λ2]→Rn,λ1,λ2∈R且λ2>λ1,使得下列不等式成立:


(1)
引理3[15]:存在一个正定矩阵P,使得下列等式成立:

(2)
其中:
S=-ATP-PA+ωP
如果S是正定的,则满足:
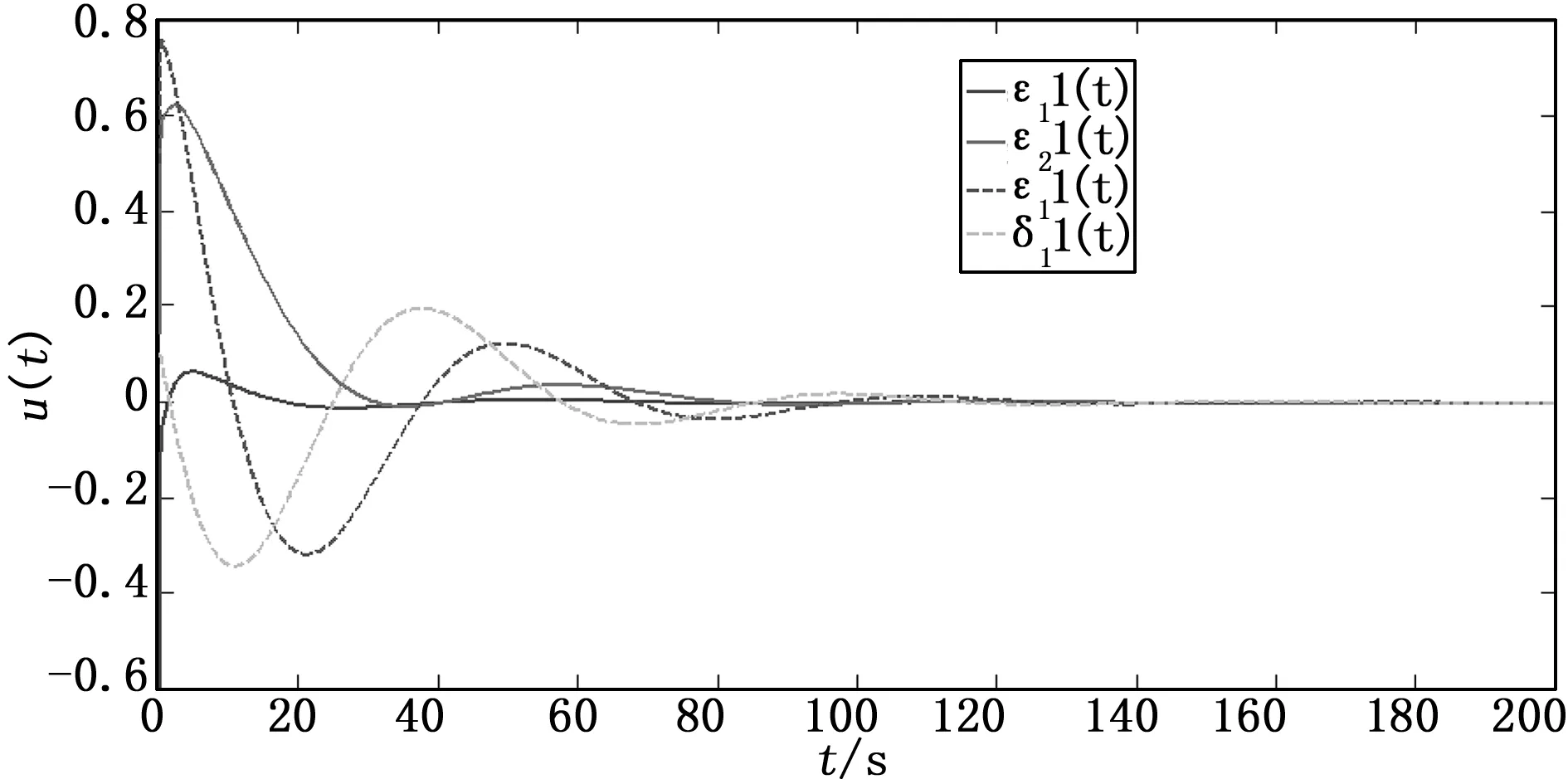
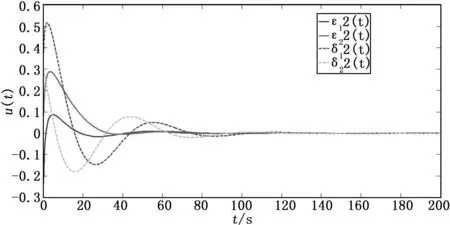
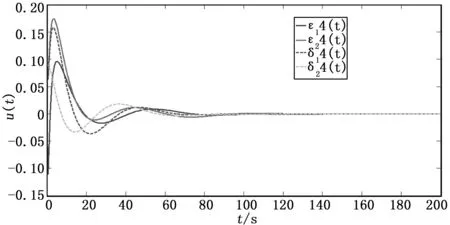
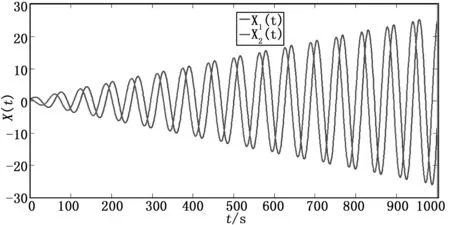
eATtPeAt (3) 引理4[18]:根据有向拓扑图信息,满足矩阵M是一个非奇异M-矩阵,其所有特征值均有正实部,同时存在一个对角矩阵θ=diag{θ1,···,θn}>0满足θM+MTθ>0。 考虑由N个跟随者和1个领导者组成的有输入时滞且有外部干扰的多智能体系统,跟随者i的动力学方程描述为: yi(t)=Cxi(t),i=1,2,…,N (4) 其中:h>0表示每个智能体输入时滞。xi(t)∈Rn,ui(t)∈Rq和yi(t)∈Rr分别表示第i个跟随者系统状态,系统控制输入和可测量输出,矩阵(A,B,Bf,C)是已知常系数矩阵。假设系统参数(A,B,C)是可控且可观测的。fi(t)∈Rq是外部线性系统产生的干扰,其动力学方程满足如下形式: (5) 其中:常系数矩阵A1是外线性系统干扰的参数,并且是已知的。 注1:外部线性系统产生的干扰在实际工程中是普遍存在的,对系统的稳定性有极大挑战性,因此,研究这类外部干扰有重要的实际意义。同时,外部线性系统产生的干扰大多满足式(5)的形式,例如,文献[19]中提到的未知常数扰动以及未知相位和幅值的谐波扰动等均可以描述成式(5)的形式,从而可以将这些外部干扰归纳为一类干扰进行研究。 针对本系统中的外部干扰,采用补偿的原理对干扰抑制,从而实现多智能体系统一致性。首先,考虑到传感器不能精确测量外部干扰信号,根据邻居智能体相对输出信息用分布式观测器对外部干扰实时估计。其次,运用前馈控制的思想,将外部干扰实时估计值设计一致性协议实现对外部干扰的补偿。 领导者的动力学方程描述为: y0(t)=Cx0(t) (6) 其中:x0(t)∈Rn,y0(t)∈Rr分别表示领导者的系统状态和输出。 定义1:对于每一个跟随者智能体,如果设计的扰动抑制一致性协议ui(t)使得该系统在任何初始条件下均满足: 则解决了领导跟随一致性问题。 考虑到系统状态信息未知以及外部干扰不能被传感器精准测量,利用邻居智能体相对输出信息,给出同时观测状态和外部干扰的分布式观测器: (7) 其中: (8) 其中: (9) 其中: 定义协同误差ηi(t)=xi(t)-x0(t),结合式(4)和(6),得到如下形式: (10) 根据式(5)有fi(t)=eA1hfi(t-h),根据协同误差式(10)可得: ηi(t)=eAhηi(t-h)+ (11) 每个智能体处理信息时,反应时间,计算速度等都会导致输入时滞的存在,时滞的存在会影响系统的性能,本文用预测状态的方法解决时滞。类似文献[14-15]中的截取预测方法,利用式(8)估计的状态和干扰信息设计如下一致性协议: (12) 其中:γ是耦合强度参数,K是反馈增益矩阵,F是已知矩阵。 将控制协议式(12)和式(11)代入式(10)中,结合估计误差εi(t)和δi(t),得到: γBdiKeAhεi(t-h)+BfeA1hδi(t-h)- (13) (14) γ(M⊗BKeAh)ε(t-h)+γ(M⊗BK)Λ+ (IN⊗BfeA1h)δ(t-h) (15) Λ=Λ+Λ2+Λ3= (16) π1X≥BBT (17) (18) (19) (20) (21) 其中: Γ=XAT+AX+ 证明:考虑如下Lyapunov函数: V(t)=V1(t)+V2(t)= μT(t)(IN⊗P1)μ(t)+ζηT(t)(θ⊗P2)η(t) 这里:ζ是一个较小的正实数。 根据式(14),对V1(t)两边求导得到: (22) 根据式(15),对V2(t)两边求导得到: γ(M⊗BK)η(t)+γ(M⊗BKeAh)ε(t-h)+ γ(M⊗BK)Λ+(IN⊗BfeA1h)δ(t-h)]≤ 2γηT(t)(ζθ⊗P2)(M⊗BKeAh)ε(t-h)+ 2γηT(t)(ζθ⊗P2)(M⊗BK)(Λ1+Λ2+Λ3)+ 2ηT(t)(ζθ⊗P2)(IN⊗BfeA1h)δ(t-h)≤ ηT(t)(ζθ⊗((κ2+2κ3+κ4)P2P2+ (23) 这里,λ1=λmin(MTθ+θM),λ2=λmax(MTθM),K=BTP2,κ1,κ2,κ3,κ4均是正实数,存在正实数π1,π2和π3分别满足: (24) (25) (26) 由引理3可得,这里存在一个正实数ω满足:eAThP2eAh S=-ATP2-P2A+ωP2>0 (27) 同时有: 结合引理2和引理3以及式(24),有: P2BBTeAT(t-τ)eA(t-τ)BBTP2eAhηk(τ-h)dτ≤ (28) S1=-AT-A+ω1I>0 (29) (30) 同时有: 结合引理2和引理3以及式(24~26),有: eAT(t-τ)eA(t-τ)BfeA1hδj(τ-h)dτ≤ (31) 结合式(23)、(28)、(30)以及式(31),式(23)重构为: (32) 根据文献[15],对于第一个积分项(28),考虑如下Krasovskii函数: 进一步对Z1(t)求导得到: (33) 对于第二个积分项(30),考虑如下Krasovskii函数: 进一步对Z2(t)求导得到: (34) 对于第三个积分项(31),考虑如下Krasovskii函数: 进一步对Z3(t)求导得到: (35) 对于式(32)中没有积分的时滞项ε(τ-h),构造如下Krasovskii函数: 进一步对Z4(t)求导得到: (36) 对于式(32)中没有积分的时滞项δ(τ-h),构造如下Krasovskii函数: 进一步对Z5(t)求导得到: (37) 重构新的Lyapunov函数为: 结合式(32~37),得: 其中: (38) (39) (κ2+2κ3+κ4)P2P2+cI (40) 注2:LMIS(17-21)的未知参数较多,为获得满足系统的可行解,可选择用迭代方法求解。 需要注意的是参数均是一些较小的正实数,取值在以内,如果选取过大,基本没有可行解。 在本节内容中,为验证设计理论方案的有效性,考虑由一个领导者和四个跟随者组成的多智能体系统,其有向通信拓扑结构如图1所示。 每个多智能体的系统矩阵形式为: 与外部干扰相关的矩阵有如下形式: 根据图1所示有向通信拓扑图,矩阵M可得: 图1 有向通信拓扑图 图2~5表示的是系统的状态和干扰估计误差变化趋势。图6表示的是未加控制协议的开环多智能体系统的状态轨迹。 图7~8表示的是闭环多智能体系统的状态轨迹。 图2 智能体1的状态和干扰估计误差 图3 智能体2的状态和干扰估计误差 图4 智能体3的状态和干扰估计误差 图5 智能体4的状态和干扰估计误差 图6 开环系统状态轨迹 图7 闭环系统状态轨迹 图8 闭环系统状态轨迹 从图2~5可以看到状态和干扰估计误差渐近收敛于零,说明对状态和干扰的估计是满足设计要求且有效的。由图6看出未加控制协议时,开环多智能体系统的状态是发散的,而加了控制协议的图7和图8,可见跟随者和领导者状态最终达到一致,说明该一致性协议对外部干扰有良好的抑制作用。 本文主要研究了一类受到外部干扰且有输入时滞的多智能体领导跟随一致性问题。 基于截取预测方法解决输入时滞的基础上, 用分布式状态观测器同时估计状态和干扰,利用获得的状态和干扰估计信息设计一致性协议,在Lyapunov-Krasovskii 函数的系统框架下进行稳定性分析,得到多智能体系统稳定性充分条件,将获得的充分条件用具有一组迭代参数的LMIs求解,从而获得满足条件的可行解。 最后, 通过仿真验证了设计方案的可行性,通过仿真图可以看到外部干扰得到有效的抑制,同时也实现多智能体一致性。未来研究的重点主要是考虑每个智能体外部干扰不同的情况,同时对已有证明方法进行简化改进,从而减下系统保守性。2 问题描述


3 主要结果
3.1 分布式观测器设计

3.2 一致性协议


3.3 一致性分析

















4 仿真







5 总结
