敏捷卫星SGCMG群姿态机动测试用例设计研究
2019-08-29
(北京空间飞行器总体设计部,北京 100094)
0 引言
姿态机动能力是三轴稳定对地观测类卫星的一项重要指标,为满足卫星多种敏捷成像模式任务需要,新一代遥感卫星平台已逐渐采用单框架控制力矩陀螺(single gimbal control moment gyro,简称SGCMG)作为执行机构进行姿态机动。SGCMG是一种有效的动量交换装置,由低速框架和高速转子组成,高速转子转速恒定,通过调整低速框架的位置改变转子角动量方向,依靠转子角动量的进动提供控制力矩。与同等重量的飞轮相比,它提供更大的控制力矩,实现更精细化的控制力矩输出。目前,已有遥感卫星采用4~6个SGCMG群按金字塔或五棱锥构形组成卫星姿态控制执行机构,能够实现卫星高稳快速机动,卫星姿态机动的快速性、稳定性指标大幅提高。
然而,采用SGCMG群控制存在奇异问题,即在某些框架角配置下,所有SGCMG能提供的控制力矩均正交于期望的控制力矩,该状态下各SGCMG的角动量在期望力矩方向的投影已到达极值,将不能再通过改变角动量方向来产生该方向力矩,无法满足卫星姿态机动指标要求[1]。针对该问题,星上姿态控制算法进行了奇异规避算法设计[2-4],而当前SGCMG群敏捷机动测试用例的设计并未针对性考虑奇异规避功能测试,在整星综合测试阶段无法验证奇异规避算法的合理性与有效性[5-6]。因此,如何设计包含奇异规避的SGCMG群敏捷机动测试用例,提高测试用例的效率和覆盖性,是测试人员面临的一项紧迫而重要的任务。
本文针对采用SGCMG群进行姿态机动这一新技术,推导SGCMG群卫星姿态动力学模型,开展SGCMG群操纵律研究,搭建SGCMG群卫星敏捷机动闭环仿真系统,根据SGCMG群安装构型分析SGCMG群奇异性,研究一种SGCMG群敏捷机动测试用例设计方法,在整星测试阶段验证奇异规避算法设计是否合理和有效,提高测试用例覆盖充分性和有效性,对SGCMG群敏捷机动能力与指标进行全面考核。
1 SGCMG群卫星姿态动力学
1.1 SGCMG动力学
为描述SGCMG运动,定义如下坐标系[4]:
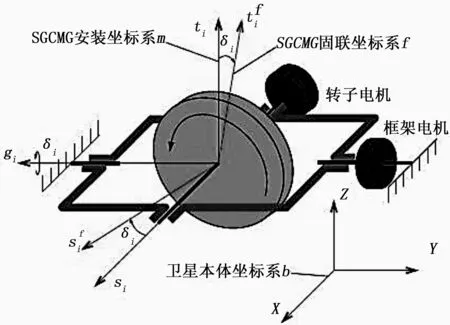
图1 SGCMG坐标系
1)固联坐标系f。如图1所示,坐标系原点在SGCMG转子质心,x轴沿框架转轴方向,其单位矢量g称为框架轴;y轴为转子自转角速度方向,其单位矢量s称为自旋轴;z轴与x、y轴构成右手正交坐标系,其单位矢量t称为力矩轴。固联坐标系在SGCMG工作过程中随框架转动。
2)安装坐标系m。在指定某一初始位置时,安装坐标系m与固联坐标系f重合,该坐标系相对于卫星本体坐标系b不动,不随框架转动。
一般地,敏捷卫星平台SGCMG群各转子稳态转速大小Ωi均相等且恒定,转子相对其质心的转动惯量矩阵Ji也均相等且恒定,相比转子而言,低速框架转动惯量可忽略,即有:
(1)
hi=Ji·(Ωi+ωgi+ω)≈Ji·Ωi=hsi
(2)
结合以上坐标系的定义,SGCMG对星体的总作用力矩Ti可推导为:
(3)
1.2 SGCMG群卫星姿态动力学
为实现卫星三轴姿态高精、高稳控制,同时考虑在轨可靠性需求,常使用4~6个SGCMG构成SGCMG群作为卫星姿态控制的执行机构,SGCMG群的常见构形有金字塔型和五棱锥型。其中,gi的配置体现SGCMG在星体上的安装方式,称为SGCMG群的安装矩阵,ti、si随框架转动而变化。
(4)
记作用在卫星质心上的环境力矩为Td,则由刚体转动的欧拉方程及转动惯量不变的假设,可得SGCMG群卫星姿态动力学方程为:
(5)
结合式(3),定义SGCMG群所提供的控制力矩为:
(6)
将式(6)代入式(5)可得:
(7)
在卫星本体坐标系b下,由式(6)可得SGCMG群提供的控制力矩分量形式为:
(8)
式中C(δ)[t1t2…tn],并称为SGCMG群的力矩输出矩阵,其元素tj称为第j个SGCMG输出力矩方向的单位矢量在卫星本体坐标系b下的坐标列阵。式(8)即为简化后的SGCMG群控制力矩输出方程,简记为:
(9)
2 SGCMG群操纵律及奇异性
2.1 SGCMG群操纵律

(10)

(11)
因此,Moore-Penrose广义逆操纵律可以根据给定期望力矩得到控制量消耗最小对应的唯一解。由于上式需要保证矩阵CCT可逆,而当系统到达或邻近某一状态时,CCT伪逆对应为无解或得到的指令角速度极大,远远超出SGCMG群的力矩输出能力,无法再通过改变角动量方向来产生该方向力矩,该力矩方向称为SGCMG群的奇异力矩方向。
2.2 奇异性测度函数
操纵律设计时往往需要根据SGCMG 系统的当前奇异状况进行控制决策,即需要一种度量来衡量不同框架角组合所对应的系统奇异程度,现有的方法包括最小奇异值度量、条件数度量或其它构型矩阵组成的函数度量,其中最常用的为:
d=det(CCT)
(12)
能否通过零运动逃离是区分显奇异与隐奇异的标志,显奇异不可通过零运动逃离。而零运动是否存在可通过以下公式进行判别[7]:
M=NTdiag(e1e2…en)N
ei=u·si=uTsi
N=null(C)
u=null(CT)
C(δ)[t1t2…tn]
(13)
式中:C为SGCMG群的力矩输出矩阵,si为第i个SGCMG的角动量方向单位矢量。实际仿真时,首先通过奇异测度函数判断是否为奇异点;当为奇异点时,通过判断M矩阵正定与否可进一步确定奇异类型。若M为正定或负定,则零运动不存在,对应于显奇异;若M不正定,则零运动存在,对应于隐奇异。可通过求M的特征值判别M是否正定或负定,若特征值全大于零,则正定;若特征值全小于零,则负定。
3 SGCMG群卫星敏捷机动闭环测试用例设计
SGCMG群卫星敏捷机动闭环测试用例设计总体思路通过建立SGCMG群卫星姿态动力学、运动学模型和PID控制器设计,搭建敏捷卫星姿态控制系统Simulink仿真框图,采用不考虑奇异规避的广义逆操纵律进行闭环仿真,寻找经历奇异点的姿态机动目标角,分别选择历经显奇异和隐奇异对应的典型姿态机动目标角作为SGCMG群姿态机动测试用例。卫星在地面电性能测试中采用该测试用例进行姿态机动测试,若SGCMG群能逃避奇异点,且卫星姿态稳定度和姿态机动时间均能达到指标要求,则证明控制器中的奇异规避算法合理有效。
3.1 卫星姿态运动学方程
卫星运动学方程可采用四元数描述为[8]:
(14)
其中:
(15)
在进行控制系统方案设计与理论分析时,上述四元数表示的运动学方程通常写成如下矩阵形式:
(16)
式中,矩阵Ε(q)定义为:
(17)
3.2 控制器设计
设卫星当前的姿态四元数为:

(18)
卫星姿态的目标四元数为:

(19)
则误差四元数为:

(20)
MT(q(t))Q
(21)
考虑卫星姿态动力学方程及三轴稳定零动量卫星的特点,设计PD控制器即可使满足卫星的姿态稳定控制要求,得指令控制力矩为:
u=-KpQe-Dωe
(22)
式中,Kp是比例系数,D为微分系数。
3.3 敏捷机动闭环仿真
3.3.1 仿真原理
以SGCMG群为执行机构的敏捷卫星姿态控制系统闭环控制过程原理如图2所示,设该卫星采用4个SGCMG进行姿态机动,搭建Simulink仿真框图如图3所示,其中没有考虑姿态测量与确定及SGCMG框架伺服系统模型,卫星姿态动力学模型、运动学模型和姿态控制器设计见上述章节。
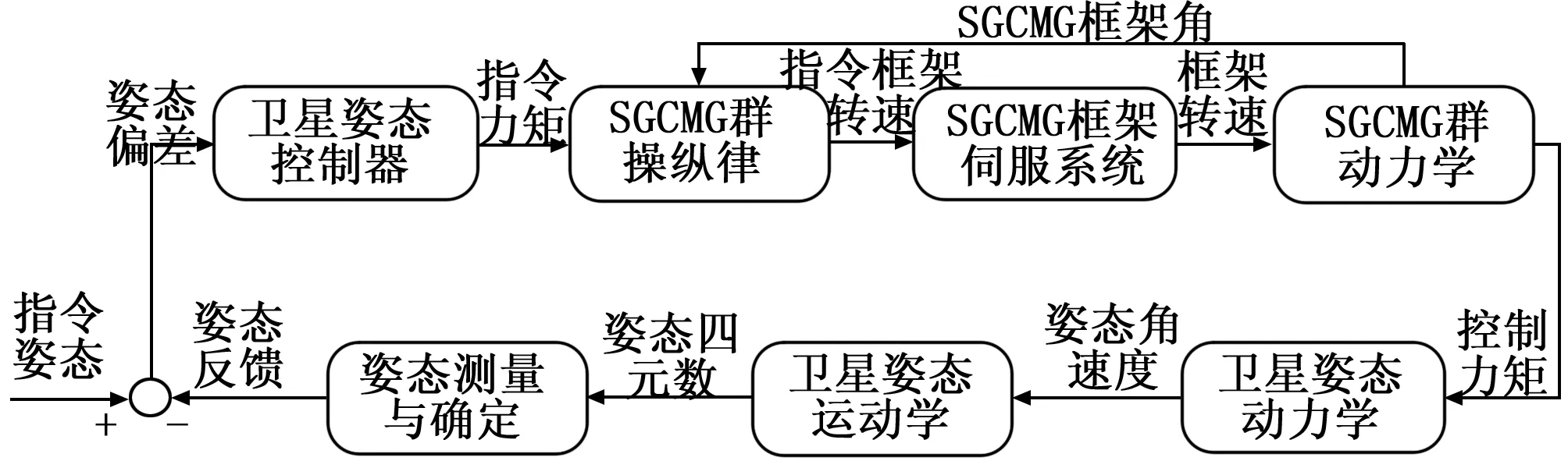
图2 敏捷卫星姿态控制系统原理图
3.3.2 仿真结果
设仿真参数如下:
h=1;初始姿态角为(0°, 0°, 0°),即初始四元数(0,0,0,1);控制力矩输出力矩限制|Tx|≤1;初始姿态角速度(0°/s, 0°/s, 0°/s);目标姿态角速度(0°/s, 0°/s, 0°/s);目标姿态角1(5°, 2°, 0°),无奇异;目标姿态角2:(5°, 5°, 0°),陷入隐奇异;目标姿态角3:(20°, 0°, 0°),陷入显奇异。
以上三种目标姿态的姿态机动过程仿真结果如表1所示。
3.4 基于机动指标的奇异规避算法闭环测试用例设计
通过SGCMG群卫星姿态机动闭环系统,采用不考虑奇异规避的广义逆操纵律进行闭环仿真,寻找经历显奇异和隐奇异的姿态机动目标角。若在实际型号姿态机动测试中,SGCMG群能规避奇异点,且卫星姿态机动时间和稳定度均达到指标要求,则证明星上奇异规避算法的正确性和有效性。该类测试用例适用于整星级测试,归纳其设计步骤要点如下。
1)输入条件。设计SGCMG奇异规避算法测试用例需以下输入条件:
(1)卫星姿态控制算法;
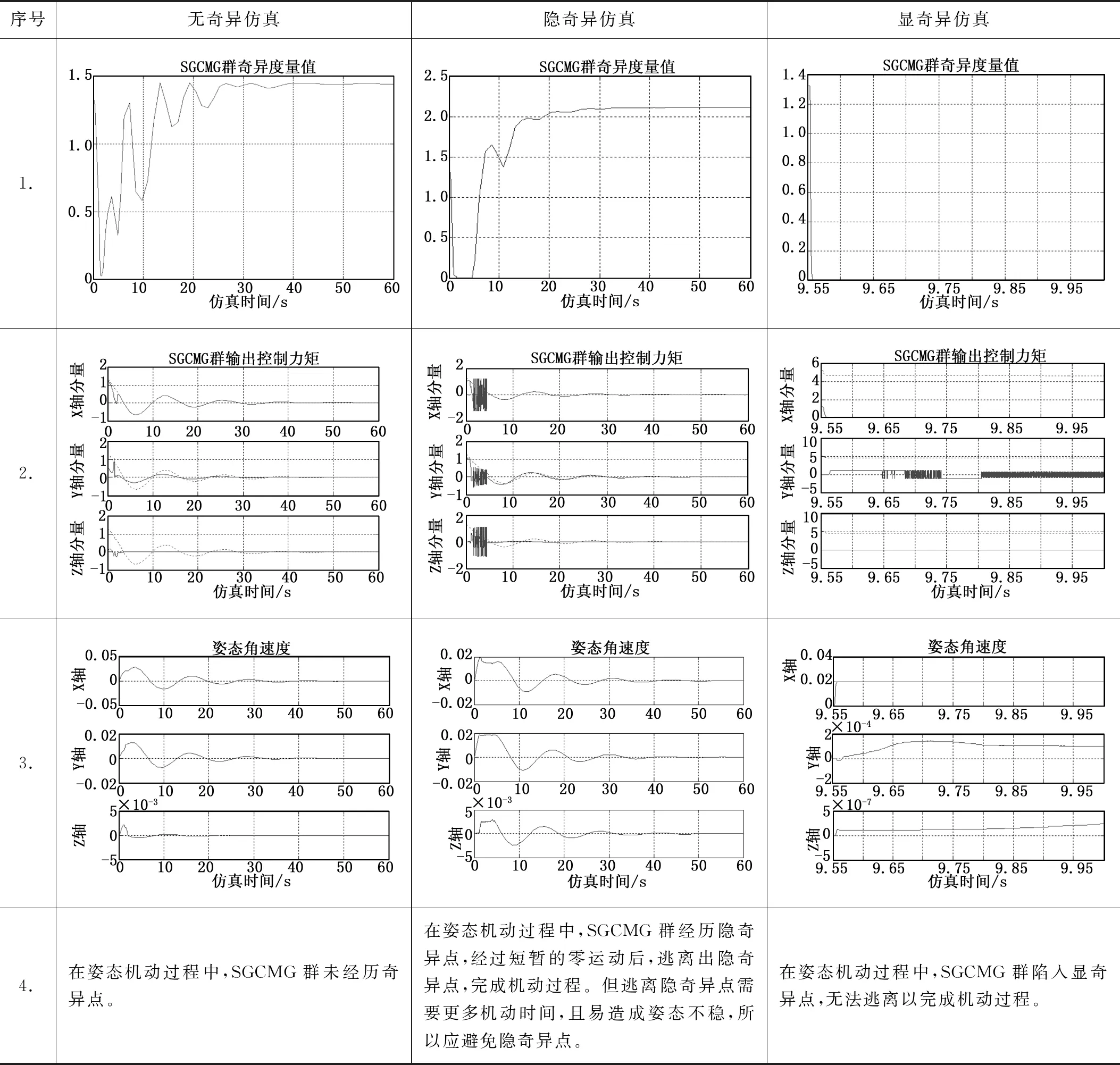
表1 姿态机动过程闭环仿真结果
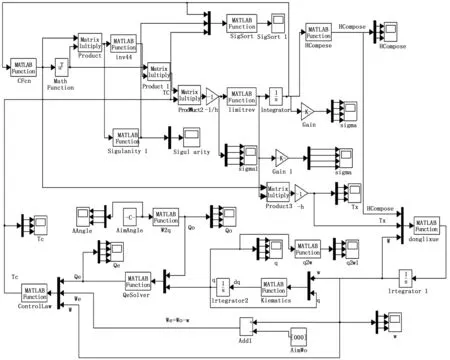
图3 敏捷卫星姿态控制系统仿真框图
(2)SGCMG群安装矩阵;
(3)卫星转动惯量矩阵。
2)姿态机动指标要求。例如:具有在沿卫星+Z轴半锥角0~±45°四棱锥范围内进行滚动+俯仰的姿态机动能力,在沿卫星+Z轴半锥角0~±45°圆锥范围内的任意位置完成最大35°姿态机动且稳定时间优于120 s。
3)添加地面设备参数。卫星测试过程中,在地面动力学设备中添加奇异度量值参数d及奇异类型判别参数M,以实时监测卫星姿态机动过程中SGCMG群的奇异特性变化趋势,判断奇异规避过程。
d=det(CCT),M=NTdiag(e1e2…en)N
4)测试用例设计。根据姿态机动指标要求,沿卫星+Z轴半锥角0~±45°四棱锥范围内进行滚动+俯仰联合姿态机动,通过遍历搜索的仿真运算,寻找存在奇异点的机动目标角组合。
(1)若在机动指标范围内,不存在经历奇异点的现象,则证明框架角组合奇异特性良好,满足指标范围内机动要求。
(2)若存在经历奇异点的现象,选择经历典型奇异点的目标角组合作为测试用例。例如选择无奇异、显奇异和隐奇异的三类目标角,如前所述,可选取其中三个典型测试用例为:
① 无奇异用例:(0°,0°,0°)→(5°,2°,0°);
② 显奇异用例:(0°,0°,0°)→(20°,0°,0°),采用广义逆操纵律,陷入显奇异,验证星上规避算法规避显奇异点的能力;
③ 隐奇异用例:(0°,0°,0°)→(5°,5°,0°),采用广义逆操纵律,陷入隐奇异,验证星上规避算法规避隐奇异点的能力。
4 结束语
本文以SGCMG群卫星姿态机测试验证需求为背景,对SGCMG群卫星姿态动力学进行了研究,针对SGCMG群在姿态机动过程中的操纵奇异问题,展开了SGCMG群操纵律及其奇异特性分析,对SGCMG群卫星姿态机动闭环仿真和SGCMG群奇异算法测试用例设计方法进行了深入研究。所得到的结论可以为后续的姿态机动测试用例设计工作提供了理论指导,具有现实的工程意义。后续将从以下几方面开展研究工作:1)奇异点细致分类测度函数研究。通过数学分析,定义通用的函数,区分显奇异点、隐奇异点和外奇异点;2)奇异规避控制律设计与仿真;3)部分SGCMG失效情况下的奇异特性分析与控制系统仿真;4)SGCMG电机模型的卫星姿态控制闭环仿真。
