一种基于FPGA的自适应射频对消方法
2019-08-27陈少华王冬华杨晓伟
陈少华 王冬华 祁 全 杨晓伟
(1.中国电子科技集团公司第二十八研究所 南京 210007;2.中国船舶重工集团公司第七二四研究所 南京 211153)
0 引言
调频连续波(FMCW)雷达发射平均功率等于峰值功率,故只需要承载较小发射功率的器件,便于固态化设计,其采用连续收发的工作方式,理论上不存在测距盲区[1],相较于脉冲体制雷达,其雷达架构相对简单、尺寸更小、重量更轻、成本更低,广泛应用于船舶导航、汽车避碰、导弹导引头、无人机载成像等领域。
调频连续波(FMCW)雷达采用连续收发的工作方式,因此发射信号会泄露进接收通道,恶化接收机灵敏度,使接收机前端饱和,甚至阻塞,这成为制约调频连续波(FMCW)雷达发展的主要因素[2]。根据天线数量,调频连续波(FMCW)雷达分为单天线和双天线两种。双天线调频连续波(FMCW)雷达采用天线空间隔离方式,并加装吸波材料和金属屏蔽等措施,可有效提高其收发间隔离度。但是,双天线雷达系统的体积、重量和制作成本明显增加,不利于系统的轻型化和低成本设计。单天线调频连续波(FMCW)雷达克服了双天线雷达在体积、重量和成本上的缺点,但如何有效提高其收发间隔离度成为必须要解决的问题[3-5]。本文基于LMS自适应算法[6-8],利用FPGA实时对消泄漏进接收通道的发射信号,有效提高单天线调频连续波(FMCW)雷达收发间的隔离度。
1 系统描述
基于FPGA的自适应射频对消系统由馈通模块、误差检测模块、DSP模块组成,其组成框图如图1所示。发射信号通过上行通道,经环形器泄漏进入下行通道,因为单天线调频连续波(FMCW)雷达系统发射信号的同时接收回波信号,且环形器的隔离度仅有30dB左右,泄漏进下行通道的发射信号严重恶化接收机的灵敏度,使下行的接收机饱和、阻塞[9-10]。自适应射频对消系统即产生一个与泄漏信号幅度相等、相位相反的对消信号,实时对消泄漏进下行通道的发射信号,从而提高收发间的隔离度,保证下行接收机的动态范围。
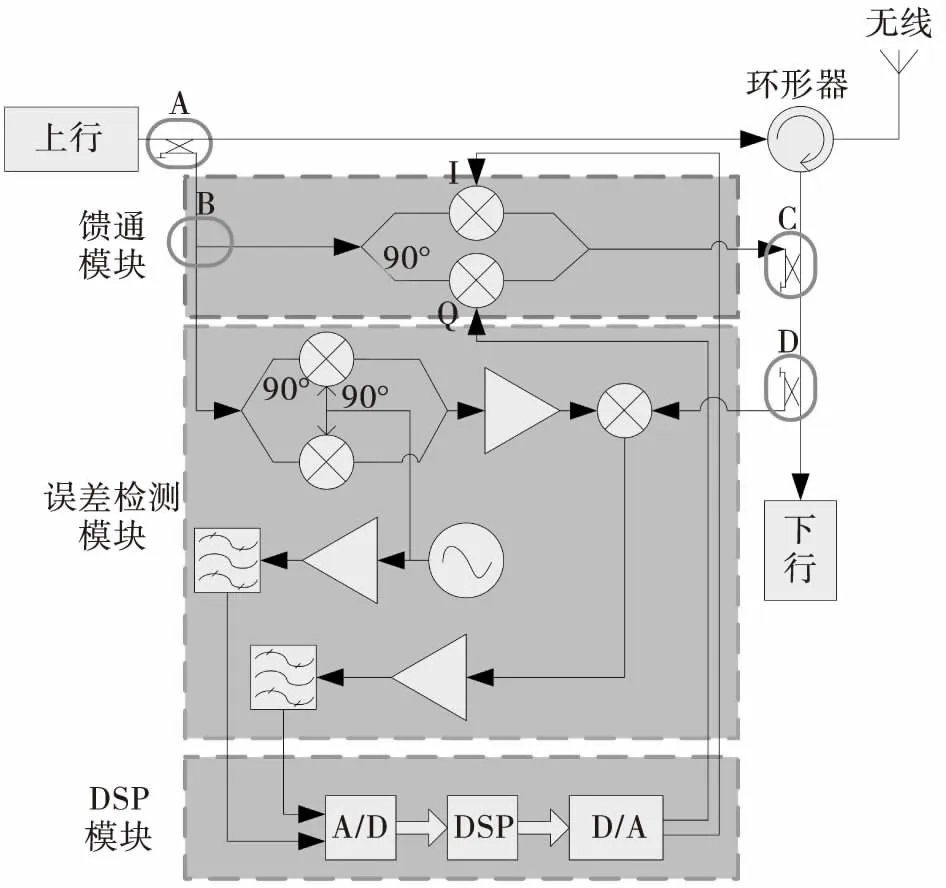
图1 射频对消系统
馈通模块产生对消信号[11-12],即通过耦合一路射频信号经矢量调制器进行幅度和相位控制,输出的对消信号经耦合器与接收机前端的泄漏信号进行对消。
误差检测模块检测对消后残余泄漏信号的幅度和相位信息。为实现良好的泄漏对消性能,采用外差式结构,使误差信号调制于参考外差频率上,消除了模拟混频器的直流偏移问题,即通过将耦合来的另一路射频信号作为正交混频器的LO,与参考外差信号混频后,再经放大与残余泄漏信号进一步下混频,最终输出误差调制信号,送后级DSP模块进行信号处理。
DSP模块为数字信号处理模块[13],其原理框图如图2所示。对误差检测模块送来的参考外差信号与误差调制信号进行A/D采样,通过数字正交、低通滤波计算出残余泄漏信号的幅度、相位信息,再根据LMS自适应算法,产生I、Q两路控制矢量,通过D/A转换成模拟I、Q信号后,送至馈通模块的矢量调制器,调节对消信号的幅度和相位[14]。整个射频对消系统构成一个闭环反馈系统,当环路收敛后,即能够实时对消泄漏进下行通道的发射信号。
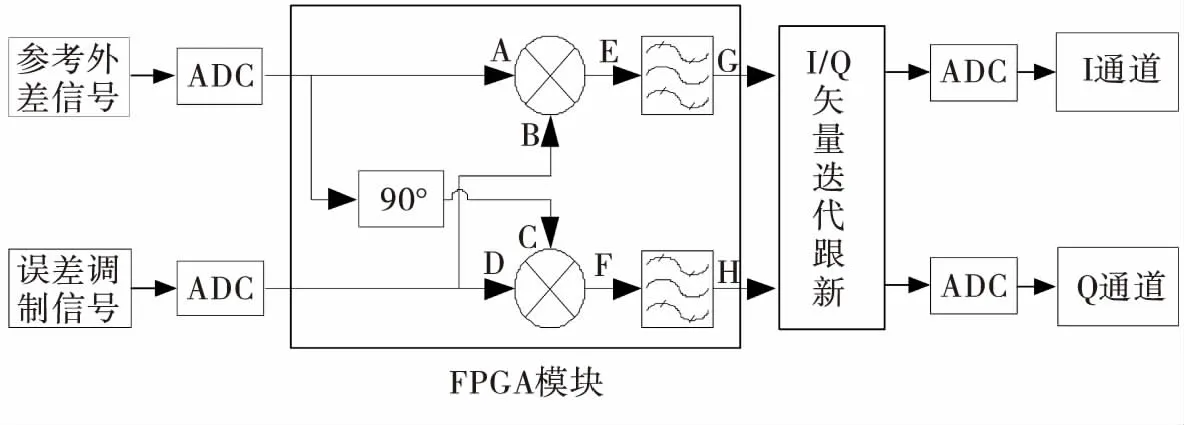
图2 DSP模块原理框图
2 LMS自适应算法
射频对消系统中DSP模块中的I、Q矢量迭代更新即基于LMS自适应算法。LMS自适应算法即最小均方根算法,其权矢量WI和WQ如式1所示。
(1)
式(1)中:n是迭代次数,μ是控制稳定度和收敛速度的常数,e(n)是误差矢量。送至馈通模块中矢量调制器的I、Q两路信号根据式(1)完成更新,矢量调制器产生对消信号,实时对消泄漏进下行通道的发射信号。
设误差检测模块送至DSP模块的误差调制信号为:
e(t)=β·cos[ωlot+Φ(t)]
(2)
参考外差信号为:
XAI(t)=α·cos[ωlot]
(3)
其经过90°相移后,信号为:
XQI(t)=α·sin[ωlot]
(4)
其中ωlo为参考外差信号的角频率,Φ(t)为误差信号与参考外差信号的相位差。误差调制信号分别与I、Q两路参考信号混频后为:
Iout=XAI(t)·e(t)
=αβ{cos[Φ(t)]+cos[2ωlot+Φ(t)]}
Qout=XAQ(t)·e(t)
=αβ{sin[Φ(t)]+sin[2ωlot+Φ(t)]}
(5)
经过低通滤波后,高频分量被滤除,I、Q两路表示为:
(6)
根据式(1),I、Q矢量进行迭代更新:
(7)
馈通模块中的矢量调制器根据控制矢量WI、WQ控制从上行耦合过来的射频信号的幅度和相位,产生与泄漏信号幅度相等、相位相反的对消信号。DSP模块中的算法在Xilinx FPGA芯片内实现,控制矢量WI、WQ每次迭代更新速度可以灵活控制,且具有良好的实时性[15],经过多次迭代更新后,控制矢量WI、WQ分别收敛于一个直流信号,泄漏信号被实时对消,射频对消系统达到一个稳定状态。
3 仿真分析
3.1 单频点状态下仿真分析
设雷达工作周期为0.1ms,发射信号为单频信号,工作频点为35MHz,采样率为100MHz,泄漏进入下行支路的信号幅度A0为0.85,初始相位为π/5,信噪比为19.3dB,从上行耦合进入馈通模块的参考信号幅度A1为0.35,初始相位为π/9。从图3、图4中可以看出,随着I、Q控制矢量不断迭代更新,整个对消系统在0.03ms内达到稳定状态,控制矢量I、Q分别收敛于2.34和-0.67,通过调整参数μ可以控制整个算法的收敛时间,参数μ越大,算法收敛时间越快,参数μ增大会导致I、Q控制矢量在稳定状态下的波动变大,降低系统的稳定性。从图5中可以看出,对消前下行支路幅度为64.72dB,对消后下行支路信号幅度被抑制到噪声以下,对消深度大于65dB。
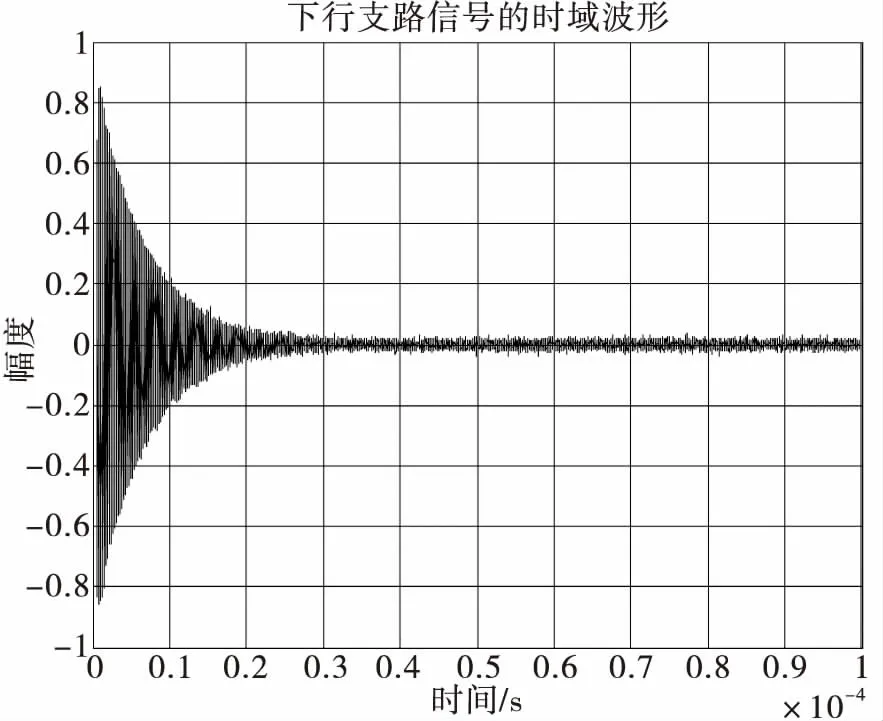
图3 单频状态下误差调制信号波形图
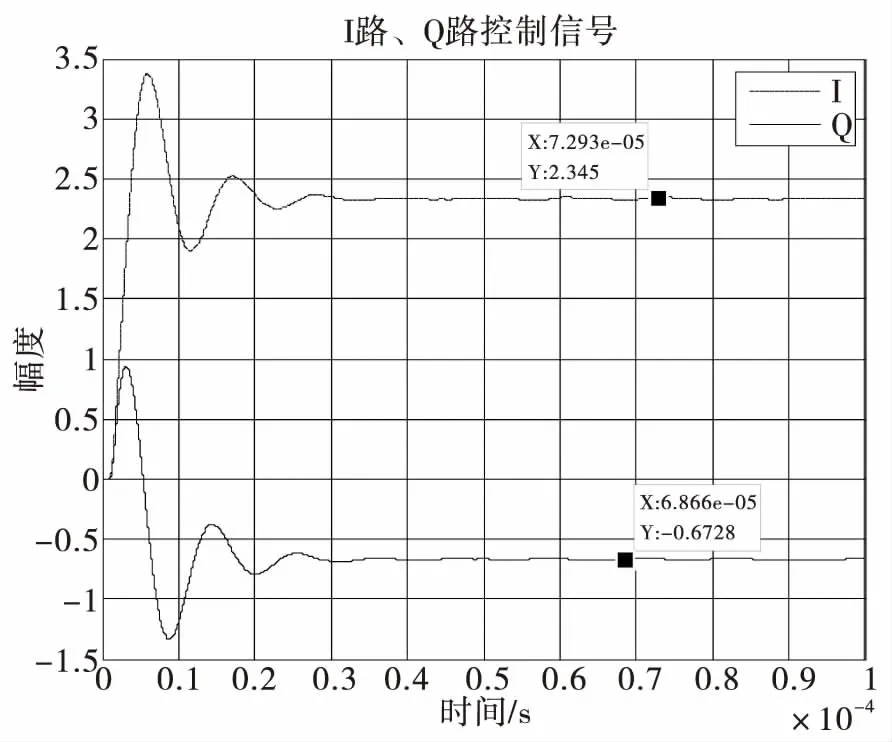
图4 单频状态下控制矢量I、Q波形图
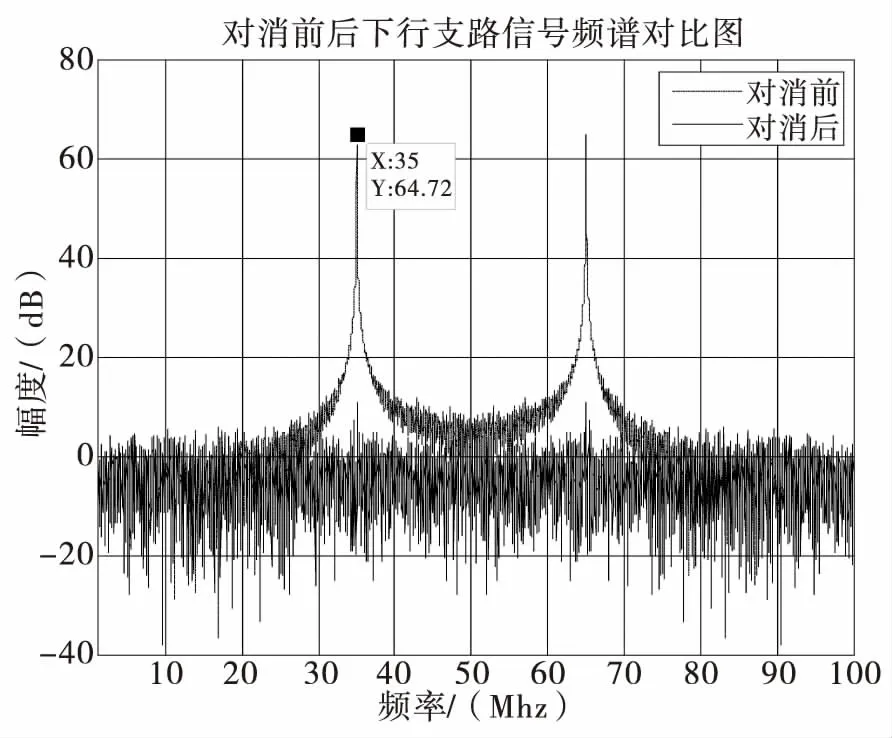
图5 单频状态下对消前后下行支路信号频谱对比
3.2 线性调频状态下仿真分析
设雷达工作周期为0.1ms,发射信号为线性调频信号,带宽为20MHz,工作频点为75MHz,采样率为100MHz,泄漏进入下行支路的信号幅度A0为0.95,初始相位为π/7,信噪比为19.8dB,从上行耦合进入馈通模块的参考信号幅度A1为0.4,初始相位为π/10。参数μ越大,收敛速度越快,但达到稳定状态时I、Q控制矢量波动越大,设置参数μ为0.1时,从图6、图7可以看出,对消系统在0.03ms内达到稳定状态,最终控制矢量I、Q分别收敛于2.35和-0.32。从图8可以看出,对消前泄漏进入下行支路的线性调频信号幅度为41.8dB,对消后,泄漏进入下行支路信号被抑制到噪声以下,对消深度大于42dB。
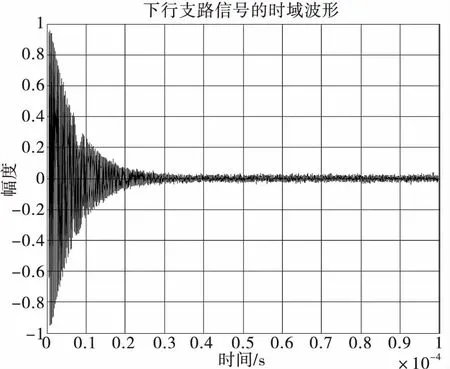
图6 线性调频状态下误差调制信号波形图
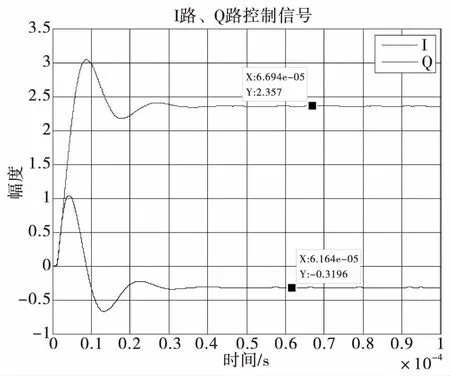
图7 线性调频状态下控制矢量I、Q波形图
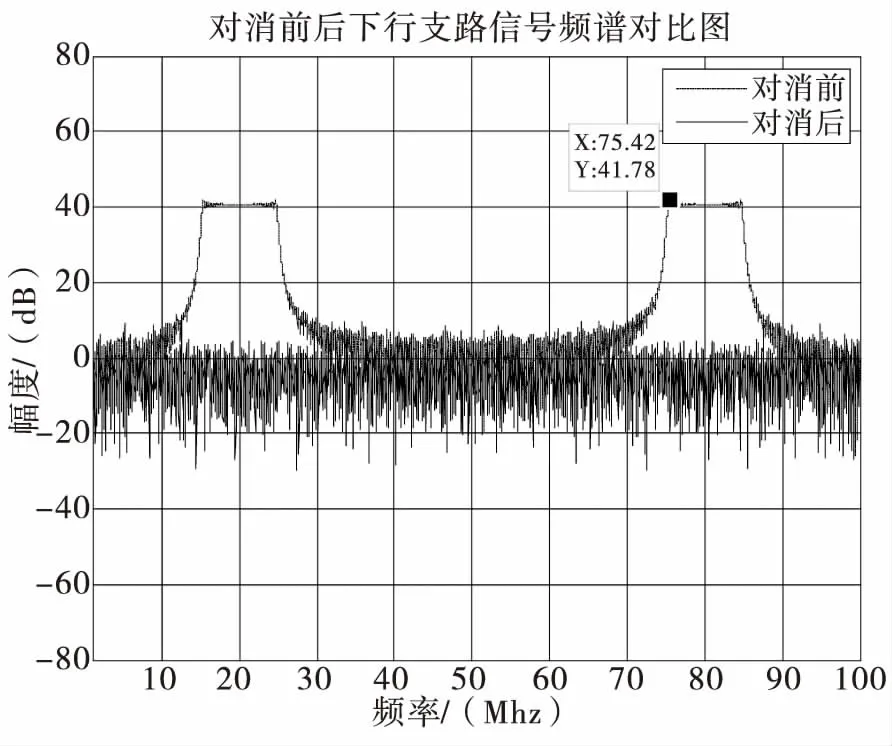
图8 线性调频状态下对消前后下行支路信号频谱图
4 实验结果
4.1 单频点状态下实验结果
在X波段单天线连续波雷达平台上,产生频率为9.41GHz的单频信号,其经过天线反射及环形器泄漏进入下行通道的信号功率为3.86dBm,其进入接收通道后,接收通道直接饱和,整个雷达系统无法正常工作,射频对消系统稳定对消后,泄漏进入下行通道的信号功率被抑制到-41.11dBm,对消深度达到44.97dB,接收通道不会被阻塞,雷达系统能够正常工作。
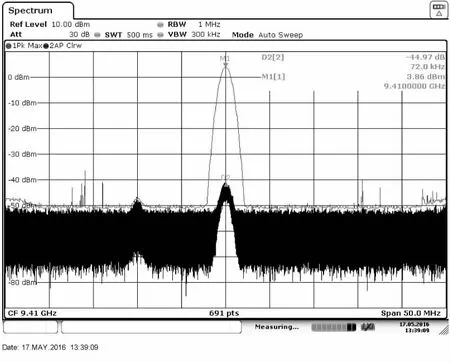
图9 对消前后单频信号频谱对比图
4.2 线性调频状态下实验结果
在X波段单天线连续波雷达平台上,产生中心频率为9.41GHz、带宽为150MHz,扫频时间为1ms的线性调频信号,其泄漏进入下行的信号功率为4.47dBm,经过对消后,泄漏信号功率仅为-35dBm左右,对消深度达到40dB,有效抑制了泄漏进入接收通道的信号功率,保证接收机前端不饱和。线性调频状态下,对消深度与整个环路响应时间有很大相关性,利用FPGA实现对消算法,可以保证环路的响应时间满足线性调频状态下的扫频要求,这样才能达到理想的对消深度。
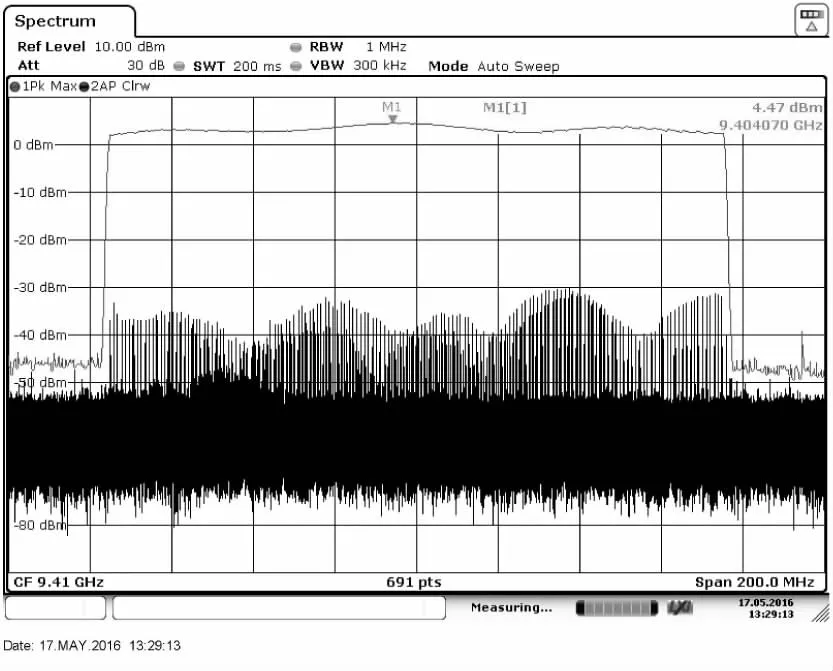
图10 对消前后线性调频信号频谱对比图
5 结束语
射频对消系统是一个模拟与数字相结合的系统,有效解决了单天线连续波体制雷达前端收发隔离度不够的问题[16]。在馈通模块、误差检测模块设计过程中射频信号通过耦合单元时,合成器、耦合器会恶化噪声系数,所以需选择插损较小的合成器或者耦合器,使射频对消系统对噪声系数的影响最低。LMS自适应算法在FPGA芯片内实现,FPGA芯片特有的并行运算能力,保证了算法的环路响应时间。射频对消系统在X波段单天线调频连续波雷达平台上进行了验证[17],对于带宽为150M,扫频时间为1ms的线性调频信号,其对消深度达到了40dB,且环形器隔离度有30dB,则前端隔离度达到70dB,验证了该射频对消系统的有效性。
