无人作战平台使用雷达定点探测方法
2019-08-27高一栋
任 强 王 伟 高一栋
(西安电子工程研究所 西安 710100)
0 引言
无人作战平台已被应用于现代战争,是军事强国不可或缺的作战力量[1]。随着无人作战平台日趋成熟和工程化应用的深入,其上安装载荷的工作自主化也得到深入发展。雷达系统作为安装在无人作战平台上的主要探测设备,其工作自主化能力对无人作战平台的作战效能有着非常重要的影响。装有雷达的无人作战平台自身有较强的电子侦察监视能力,可对战场环境进行24h不间断动态监视,并记录和回传战场动态信息。监视范围包括大范围广域搜索和局部位置重点跟踪。本文从实际应用出发,提出无人作战平台用雷达进行定位探测方法,针对战场局部位置目标进行搜索跟踪,实时掌握目标位置坐标信息,提供给指挥系统进行战场决策。
1 方法原理
控制雷达对战场局部位置进行准确跟踪监视,需要提供给雷达待监视的局部目标区域位置中心大地坐标,雷达位置大地坐标,以及安装雷达的无人作战平台的姿态数据(航向角,纵摇角,横滚角)。雷达根据自身和监视局部位置中心的大地坐标(经度,纬度,高度),经过一系列坐标转换,解算出雷达坐标系下的针对待监视目标区域的中心位置的波束指向。然后根据无人作战平台的姿态数据对该波束指向进行补偿修正,从而得到指向待监视目标区域中心位置的准确的雷达波束指向。整个解算过程随着无人作战平台的运动实时动态刷新。
雷达定位探测数据流图如图1所示。

图1 雷达定位探测数据流图
1.1 雷达信息输入
雷达工作输入包括两部分:监视的局部目标位置中心大地坐标(目标经度,目标纬度,目标海拔高度)作为雷达工作参数,可从雷达系统人机交互界面输入。雷达自身大地坐标(雷达经度,雷达纬度,雷达海拔高度)和无人作战平台的姿态数据(横滚角,纵摇角,航向角)有该平台上安装的组合惯导给出。
1.2 雷达波束指向确定
雷达系统波束指向确定分为波束解算和波束稳定两部分组成。波束解算根据雷达和待探测目标区域中心的大地坐标求出雷达波束在雷达坐标系中指向待探测目标区域中心的角度。波束稳定解决无人作战平台姿态变化对雷达波束指向精度的影响问题,也就是要补偿装有雷达的无人作战平台因自身姿态变化(航向变化,纵摇变化,横滚变化)引起的波束指向偏差。
1.3 搜索目标输出
雷达监视的局部目标位置信息,根据不同的功能雷达探测的信息有所不同,主要包括目标坐标,目标识别信息,SAR数据,以及气象数据等等。
2 算法设计
坐标变换完成将大地坐标系下的雷达位置坐标和待探测目标区域中心坐标转换为雷达坐标系下的待探测目标区域中心相对雷达的坐标。整个转换过程包括将雷达位置和待探测目标区域中心大地坐标系下的坐标转换为地心直角坐标,然后将地心直角坐标转换到站心坐标系(又称东北天坐标系(ENU)[2],最后解算出在雷达坐标系下的波束指向。
2.1 大地坐标系转换到地心直角坐标系
大地坐标系(纬度φ,经度λ,高度h)转换到地心地固直角坐标系(x,y,z)[2-3]的变换公式:
x=(N+h)cosφcosλ
(1)
y=(N+h)cosφsinλ
(2)
z=[N(1-e2)+h]sinφ
(3)
(4)
(5)
涉及具体参数说明如下:
N:基准椭球体的卯酉圆曲率半径;
e:椭球偏心率;
a:基准椭球体长半径;
b:基准椭球体短半径。
2.2 地心直角坐标转换成站心坐标
根据2.1中式(1)、式(2)和式(3),求出的地心直角坐标系下的雷达坐标(无人作战平台)和待探测目标区域中心坐标,求出站心坐标系下雷达到待探测目标区域中心坐标的矢量。
坐标转换矩阵S为:

(6)
若地心直角坐标系下雷达指向待探测目标区域中心的矢量为
(7)
其中,Φ为大地坐标维度;λ为大地坐标经度;
(xr,yr,zr)为待探测目标区域中心在地心直角坐标系下的直角坐标;(x0,y0,z0)为雷达在地心直角坐标系下的直角坐标。
则站心坐标系下的雷达指向待探测目标区域中心的矢量为

(8)
2.3 波束稳定
波束稳定是为了解决无人作战平台本身抖动造成的雷达波束指向误差。无人作战平台本身抖动主要有航向角α变化、纵摇角β变化和横滚角γ变化三个方面。统筹这三个角度的影响,生成波束稳定变换矩阵T,T的推导过程如下[3]:
首先,计算航向角α的变化对波束矢量的影响,影响矩阵Tα为:
(9)
其次,计算纵摇角β的变化对波束矢量的影响,影响矩阵Tβ为:
(10)
最后,计算横滚角γ的变化对波束矢量的影响,影响矩阵Tγ为:
(11)
由式(9)、式(10)及式(11)得到波束稳定变换矩阵T,见下面矩阵所示。
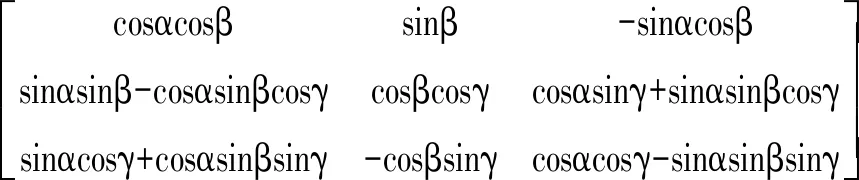
(12)
经过T变换后,得到波束稳定后的指向矢量,见式(13)所示。

(13)
最后,再将站心直角坐标系下的雷达对待探测目标区域中心的波束指向矢量转换为站心极坐标系(即雷达极坐标系)下的雷达指向待探测目标区域中心的距离、方位角和俯仰角,就得到了正确的雷达稳定波束指向。转换公示见式(14)、式(15)及式(16)所示,
(14)
(15)
(16)
式(14)-(16)中,参数说明如下:
R:雷达指向待探测目标区域中心的距离;
azi:雷达指向待探测目标区域中心的方位角;
ele:雷达指向待探测目标区域中心的俯仰角。
3 算法实现
3.1 算法环境
无人作战平台使用雷达进行定点探测方法的实现软件在某型无人飞艇载毫米波雷达的嵌入式运行平台上进行了实现并投入使用。平台通信及数据流见图2所示。毫米波雷达安装在无人驾驶飞艇上,显控终端安装在地面车辆的显控终端中,雷达和显控终端之间的通信通过安装在无人飞艇和地面上的无线通信链路系统进行。
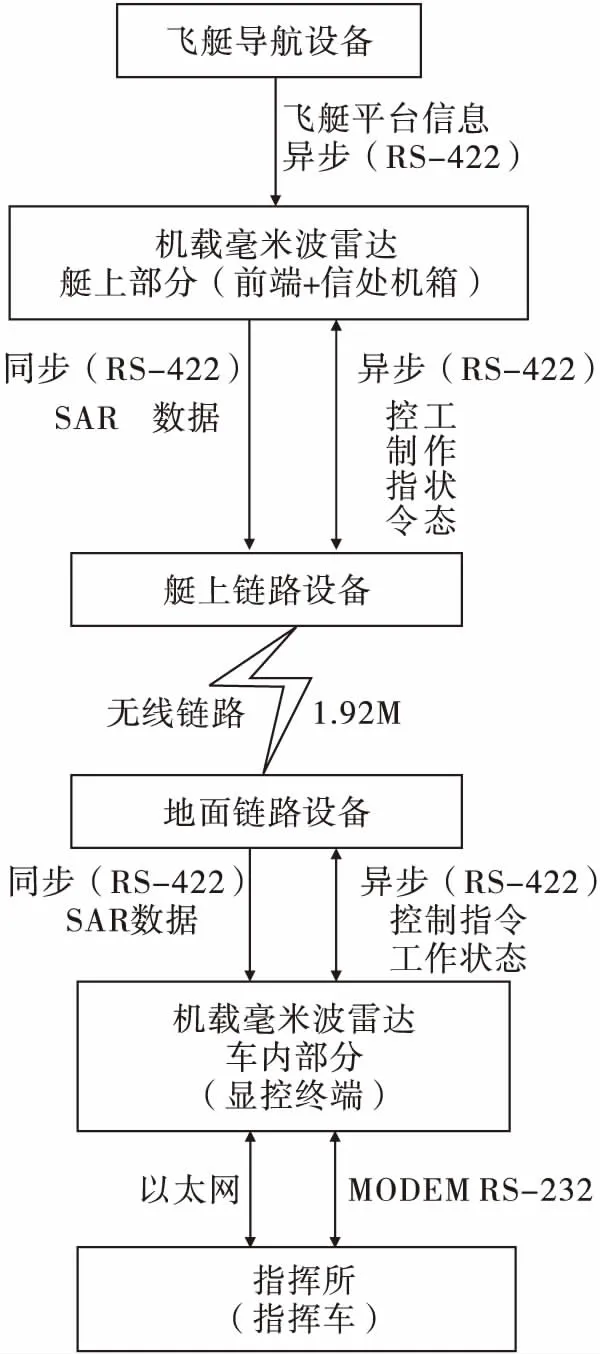
图2 通信及数据流
该嵌入式运行平台安装在信处机箱中,平台的硬件环境为基于PowerPC的单板机和AD采样处理板,以及数据/信号处理板,单板机上设计有标准的RS-422异步串口,自适应10M/100M/1000M以太网络接口,AD采样处理板上设计有高速同步串口。平台上运行的软件环境为嵌入式VxWorks操作系统以及该系统上运行的雷达中心控制软件、数据处理软件和信号处理软件。
地面车辆中运行的显控终端运行在window及其兼容的系统平台上,作为待探测目标区域中心坐标的输入人机接口(通过鼠标和键盘交互),并以图文方式显示雷达探测到的目标数据信息。
3.2 算法流程图
无人作战平台使用雷达进行定位探测方法的算法流程见图3所示。
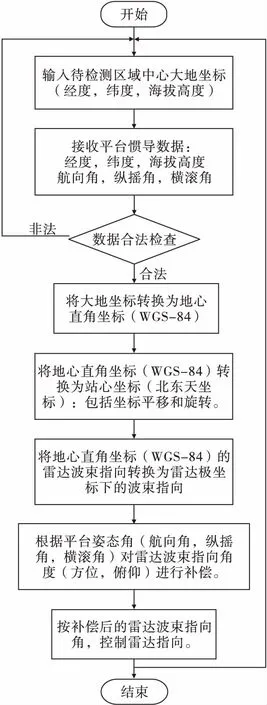
图3 算法流程
4 结束语
无人作战平台使用雷达进行定位探测方法在某电子装备试验基地无人驾驶飞艇上得到了验证。该无人驾驶飞艇安装有机载毫米波雷达,该毫米波雷达采用Ka波段,扫描方式为俯仰机械扫描,方位相位控制扫描体制。验证过程针对该雷达特点而不失一般性,方法的结论分析分为两方面:波束指向计算和波束稳定。波束计算只要按照理论分析和计算公式进行解算就能得到准确结果。而波束稳定则需要试验验证文中波束稳定补偿算法的正确性。
验证以雷达俯仰角控制为例,验证采用的数据为载有毫米波雷达的无人驾驶飞艇实测数据。验证结果见图4和图5所示。图4中,雷达指定俯仰角度变化范围为(-10,0,10),纵摇角为(-10,0),补偿角为(5,25)。从图中数据可以看出:平台纵摇角造成雷达俯仰角度偏低,而补偿角度弥补了纵摇角对雷达俯仰指向的影响,使得最终的俯仰控制角度和雷达指定角度一致,波束稳定补偿算法效果图见图5所示。
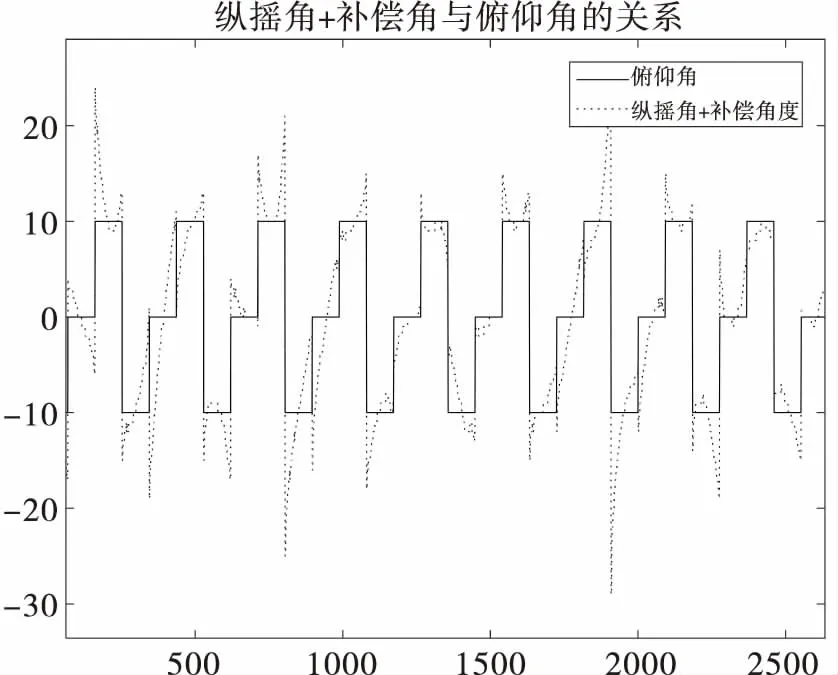
图4 雷达控制俯仰角、无人平台纵摇角和补偿角变化曲线

图5 波束补偿后的俯仰实际控制角度和指定角度的变化曲线
