一种TWS雷达天线水平度补偿的设计方法
2019-08-26徐光辉
张 彪,任 旺,徐光辉
(上海航天电子技术研究所,上海 201109)
0 引言
根据复杂电磁环境的现状和提供高精度目标指示的需求,机相扫描三坐标雷达的跟踪精度是一个非常重要的指标。在探测目标过程中,影响雷达跟踪精度的因素有很多,其中雷达所在平台水平度的影响是一个不可忽视的因素。车载雷达整车调平及天线转动带来的晃动,阵面受风吹等都会影响雷达所在平台的水平度,进而影响雷达的测角性能。要保证雷达处于一个稳定平台上,在机械上实现比较复杂,耗费成本较高,在雷达信号处理的后端对平台的水平度补偿已经成为一个通用的模式。在雷达数据处理软件中,对雷达检测到的点迹数据进行水平度补偿,实现简单、成本低和稳定性高,能很好地满足工程实际的需要。
1 TWS雷达分区处理原则
基于TWS系统的雷达将扫描区域平均分成n个,一般取16,24或32。每个区域称之为扇区,分别为第0扇区,第1扇区,......,第n-1扇区,如图1所示[1-3]。雷达数据处理在创建的扇区基础上进行,包括点迹处理、航迹处理等。对空域已扫描过的扇区,用流水作业实现宏观上的并行处理,当天线扫过一个扇区时,处理向前滑动一个扇区,重复一个流水作业[3-5]。
本文主要考虑雷达数据处理按扇区读取到信号处理点迹数据后,利用天线水平数据,对点迹方位、俯仰进行补偿的点迹处理问题。

图1 TWS分区及工作过程
2 天线水平度补偿方法
天线水平仪通常置于雷达天线安装平台上,能快速感知安装平台的水平姿态,并将实时水平姿态数据传送至雷达系统。由于雷达所在平台的车载坐标系与大地坐标系不重合,以及各种因素导致载体不能处在水平位置,因此,需要将雷达点迹由车载坐标系变换至大地坐标系下[5-7],需要根据天线水平度进行方位、俯仰维上的补偿[6]。
2.1 坐标系规定
天线水平度补偿时,需要规定几个坐标系及若干参数的定义:
① 车载坐标系(Ac,Ec,R):其中,Ac为天线在车体的投影与车体中轴线的夹角,顺时针为正;Ec为天线在车体的投影与天线的夹角,向上为正;R为斜距,即天线与目标的距离。
② 大地坐标系(A,E,R):其中,A为天线在水平面的投影与正北的夹角,顺时针为正;E为天线在在水平面的投影与天线的夹角,向上为正;R为斜距,即天线与目标的距离。
③ 车头方向(KD):KD为导航设备给出的整车方位(相对于正北)。
④ 方位码盘值(Am):Am为天线转动时所处的方位值(相对于车体中轴线的夹角)。
⑤ 横倾、纵倾数据[8-10](GRx,GRy):伺服输出的天线横倾、纵倾规定:车头高时纵倾GRy为正,车体右侧低(行车方向)时横倾GRx为正。
2.2 水平度补偿方法
由于水平仪给出的车摇横倾、纵倾数据的频率比扇区频率大,所以一个扇区内,可以接收若干组横倾、纵倾数据。一个扇区内接收车摇横倾、纵倾数据的形式如图2所示。

图2 一个扇区内接收车摇横倾、纵倾数据的形式
雷达在第n-1扇区内时,数据处理接收信号处理大地坐标系下的点迹(a,r,e),同时水平仪连续发送车摇数据,雷达伺服系统收集到车摇数据后,再连同伺服此时所知的车头方向及方位码盘值转送若干组车摇数据(GRx,GRy,Am,KD)至数据处理。由于信号处理点迹是大地坐标系下的数据,没有考虑天线平台水平度的影响,需要在数据处理中利用车摇数据进行水平度补偿[11-13],补偿原理如图3所示。

图3 水平度补偿原理
水平度补偿的具体步骤如下:
① 车载坐标系与大地坐标系在方位上只相差一个车头方向,可以先将信号处理按扇区读取的点迹转换到车载坐标系下时,转换至车载坐标系下的坐标为(Ac,Ec,R):
Ac=a-KD ,
(1)
Ec=e,
(2)
R=r。
(3)
② 雷达数据处理根据点迹方位Ac以及车摇方位数据Am,寻找与方位Ac最接近的车摇方位数据Am1及Am2,找到方位Ac左右最近的2组车摇数据分别为(GRx1,GRy1,Am1,KD)和(GRx2,GRy2,Am2,KD),其中,Am1≤Ac≤Am2。
③ 根据车摇数据的方位码Am偏离点迹方位Ac的值作为权重进行加权得到点迹方位Ac时的车摇参数。偏离方位差越大,所占的权重越小,反之,则权重越大。根据方位偏移值得到权重系数p1和p2:p1=Ac-Am1,p2=Am2-Ac。
根据权重系数计算得到点迹方位Ac时对应的车摇横倾、纵倾数据:
(4)
(5)
④ 得到水平补偿后的大地坐标下的点迹值[14-16](A,E,R),根据点迹数据及相对应的车摇数据,将车载坐标系下的点迹数据(Ac,Ec,R)转换到大地坐标系下,得到补偿后的点迹方位A、俯仰E:
(KD),
(6)
E=arcsin[cosEc·(sinGRy·cosAc-cosGRy·
sinGRx·sinAc)+cosGRy·cosGRx·sinEc],
(7)
式中,距离R保持不变。
经过以上几个步骤,在信号处理点迹参数的基础上,结合相应的车摇数据完成了雷达天线水平度的补偿。这样便于数据处理完成航迹处理等后续过程,得到高精度的目标跟踪数据。
3 水平度补偿结果分析
采集雷达天线水平仪的水平度数据,雷达扫描一周内采集的车体纵倾、横倾数据如图4所示。可以看出,随着机-相扫描雷达在方位上的转动,车体左右、前后的摇晃有时接近0.5°。一般以3°的波束宽度工作的单脉冲测角雷达,要求的精度为十分之一波束宽度(即0.3°)。此时,必须考虑车体横倾、纵倾对雷达测角的影响[16]。

图4 雷达扫描一周内采集的车体纵倾、横倾数据
某车载三坐标搜索雷达的实际目标飞行试验,通过水平补偿前后,航迹滤波值与目标飞行真值数据的比较,分析雷达的精度。目标起始距离58.3 km,目标飞行高度800 m,速度190 m/s,检查水平补偿前后的精度变化。进行水平补偿后,目标跟踪滤波数据与真值的比较如图5所示。
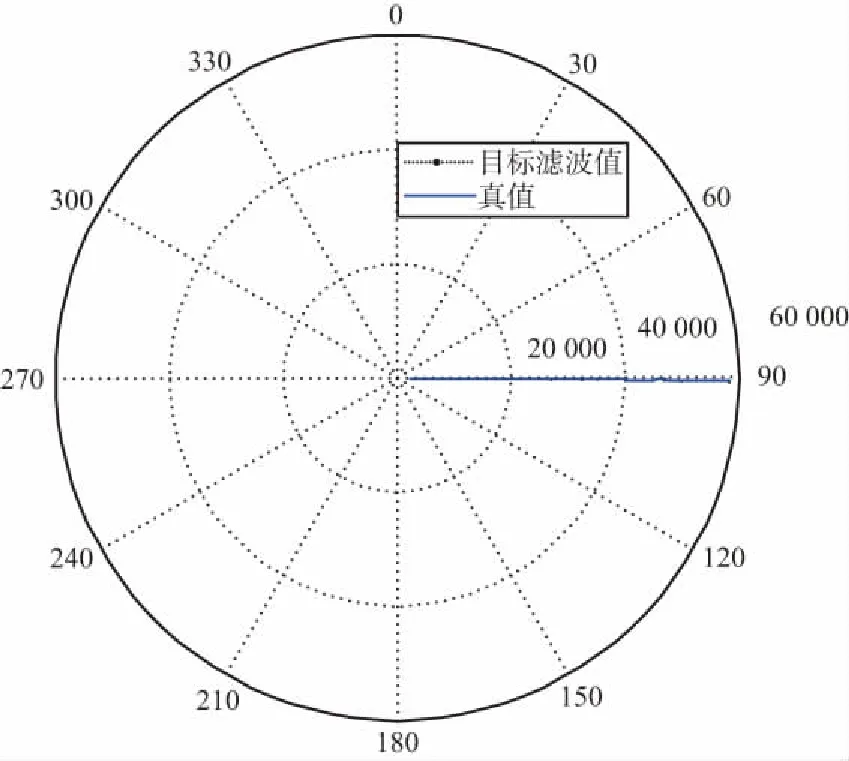
图5 进行水平补偿后,目标跟踪滤波数据与真值的比较
3.1 水平补偿前后一次差比较
将水平补偿前后的目标跟踪滤波数据与同时刻的真值数据进行比较,得到方位一次差、俯仰一次差如图6,图7所示[16-17]。

图6 水平补偿前后方位滤波值与真值的一次差

图7 水平补偿前后俯仰滤波值与真值的一次差
通过水平度补偿后,航迹滤波数据与真值的一次差明显减小。
3.2 水平补偿前后精度对比
通过水平补偿前后的雷达滤波数据与真值在方位及俯仰上做精度分析,分别得到方位及俯仰的系统误差、起伏误差和总误差如表1所示。可见,通过这种水平补偿方式,可以有效地提高雷达跟踪精度[16-18]。

表1 水平补偿前后雷达跟踪精度对比 (°)
4 结束语
随着武器系统对雷达精度提出的要求越来越高,雷达所在平台水平度影响雷达的测量精度的问题需要得到进一步的重视。本文介绍的TWS雷达天线水平度补偿设计方法,通过雷达数据处理后期处理,可以修正雷达信号处理前端测角带来的误差。通过实际飞行试验进行了确认。该方法实现简单清晰,便于计算机软件实现,能有效地提高雷达的跟踪精度。下一步的工作将主要研究天线平台随车移动以及不同的天线水平度对测角性能的影响。
