视频图像方法在直升机旋翼动力学试验中的应用研究
2019-08-22吴国宝易晖
文/吴国宝 易晖
1 引言
直升机旋翼为直升机的飞行提供所需的升力、操纵力和推进力,是直升机最具特色的系统,其发展经历了铰接式旋翼、无铰式旋翼、球柔性旋翼和无轴承旋翼等过程。旋翼系统的构型日趋简单化,但其各种特性的耦合却越来越复杂,使得旋翼系统的分析和设计也越来越复杂。旋翼试验对于旋翼预先研究和旋翼设计的验证变得越来越重要。旋翼动力学试验为旋翼桨叶的动力学特性分析提供有效的数据支撑。如何在旋翼动力学特性试验中对旋翼桨叶运动参数,如挥舞角、摆振角、总距角进行方便快捷、精确测量,已成为近年来国内外直升机旋翼试验技术研究的重要课题。
目前,国内外在课题、型号试验中测量旋翼桨叶运动参数的方法主要有:
(1)应变测量法,其通过在桨叶表面特定位置按照不同组桥方式粘贴应变片,然后对桨叶进行静态标定确定运动参数与应变之间的对应关态标定确定运动参数与应变之间的对应关系,该方法技术成熟、试验设备简单,但粘贴应变片会对桨叶表面气动特性造成不同程度的破坏,且大尺寸柔性桨叶静载荷与动载荷之间存在较大差异,至使测量结果的准确性不高;
(2)光纤测量法,该方法与应变片测量方法类似,同样也存在光纤粘贴会对桨叶表面气动特性造成不同程度的破坏及测量结果的准确性不高的问题;
(3)激光动态测量法,该方法也是一种非接触式测量方法,通过安装在桨毂上的激光三角位移传感器及线阵CCD 位移传感器测量桨叶运动参数,其具有抗环境噪声干扰能力强等优点,但也存在设备安装不方便,可测量范围少、三叉件结构对旋翼动特性试验存在安全隐患等不足。
针对以上旋翼运动参数测量方法存在的不足,提出了一种利用视频图像原理的非接触式测量方法,以满足在不同类型旋翼动力学试验中对旋翼桨叶运动参数的测量需求。首先,通过一组或多组相机同步采集桨叶在不同试验状态下的二维图像;然后,依据双目立体视觉原理通过反演重构出桨叶表面的三维坐标;最后,根据运动参数解算公式计算出不同试验状态下桨叶的挥舞角、摆振角、扭转角。该方法具有测量视场大、抗环境影响能力强、测试精度高等优点。
2 原理介绍
2.1 旋翼试验塔
目前国内直升机的旋翼动力学性试验大部分是在中国直升机设计研究所综合试验室的旋翼试验塔上完成的。该旋翼试验塔塔高21.5m,顶部工作台直径约3.5 米,底部直径12.5 米。能够覆盖13t 以下的直升机型号及课题旋翼性能、动力学及耐久性等试验。旋翼试验塔由动力拖动系统、传动系统、天平测力系统、操纵系统、激振系统、数据采集系统和监控报警系统等组成。旋翼试验塔外观图如图1。
2.2 视频图像方法
与人眼成像原理相似,视频图像方法的基本原理是利用一组(左、右两台相机)或多组相机同步获取空间某一感兴趣区的二维图像,然后对每组图像进行匹配找出对应点,根据由事先标定得到的两台相机的内、外部参数,便可通过反演重构出该点在给定空间坐标系中的三维坐标,其基本原理图如图2所示。
如图2所示,设q 为空间中的任意一观测点;OL和OR分别表示左、右两个相机的光圈中心;qL、qR分别表示q 在左、右相机中的成像点;从图中可以很直观地看到,一台摄像机可以确定一条直线OLqL或ORqR,由于点q 同时在直线OLqL、ORqR上,故通过求解这两条直线的交点便可得到q 点三维坐标。
令,观测点在世界坐标系(X,Y,Z)中的坐标为q(xw,yw,zw),其在左、右相机采集的二维图像上的对应点的坐标为qL(xL,yL),qR(xR,yR),则存在以下关系:
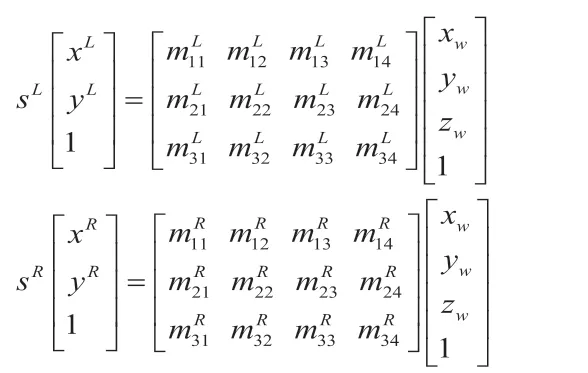
式中,为投影矩阵的第i 行,第j 列元素。公式(1)消去sL和sR,得到如下关于空间坐标q(xw,yw,zw)的4 个线性方程:

图1:旋翼试验塔外观图
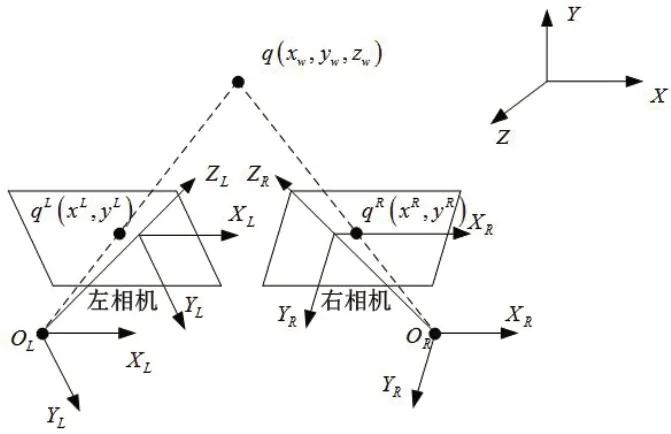
图2:视频图像法基本原理示意图
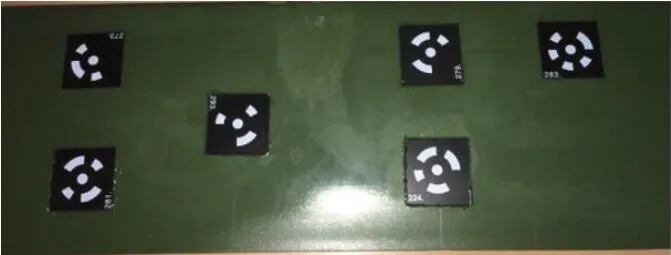
图3:桨叶下表面编码标记点粘贴

图4:试验中使用的光源

图5:地面相机参数标定
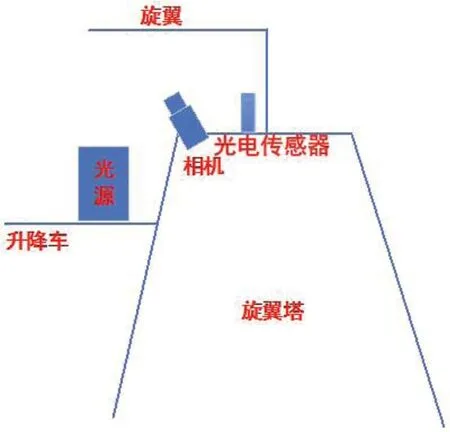
图6:视频图像系统安装示意图
以上公式是一个超静定方程,可用最小二乘法对其进行求解。对图像对中的各点重复上述过程便可重构出桨叶下表面所有特征标记点的三维坐标,据此便可根据旋翼运动参数解算公式计算得到旋翼桨叶在不同运动状态下的运动参数。
3 试验设计
3.1 试验件
视频图像方法测量旋翼运动参数应用研究试验选用某型直升机旋翼缩比模型,其具体参数如下所示:
旋翼半径: R = 5m;
桨叶片数: k = 5 片;
基本弦长: b = 0.3m;
旋翼额定转速: n = 422 r/min;
旋转方向:俯视顺时针旋转。
3.2 测试系统组成
结合旋翼试验塔实际工作环境及试验件特性确定视频图像方法测试系统的组成为:一组(左、右两个)相机选用德国Basler 生产的工业相机(分辨率:500 万像素、帧率:100fps、曝光率:30us、镜头选用德国施耐德12mm 定焦镜头);7075 航空铝制横梁;相机参数标定板选用1m×1m 高强度合金十字尺;补光光源选用无频闪LED 灯(功率:2KW,光强:100000 流明);相机触发传感器选用邦纳光电传感器;特征标记点采用编码环标记点;相机触发控制器、工作站(用于图像存储及坐标解算)。
3.3 特征标记点的制作及粘贴
沿桨叶下表面在桨叶剖面1/4 弦线位置布置多个圆形编码点,用于进行挥舞角、摆振角的计算;在桨叶桨尖0.7R 剖面一个较小的区域内,布置多个不共线的圆形编码点,形成一个平面,用于扭转角的计算。
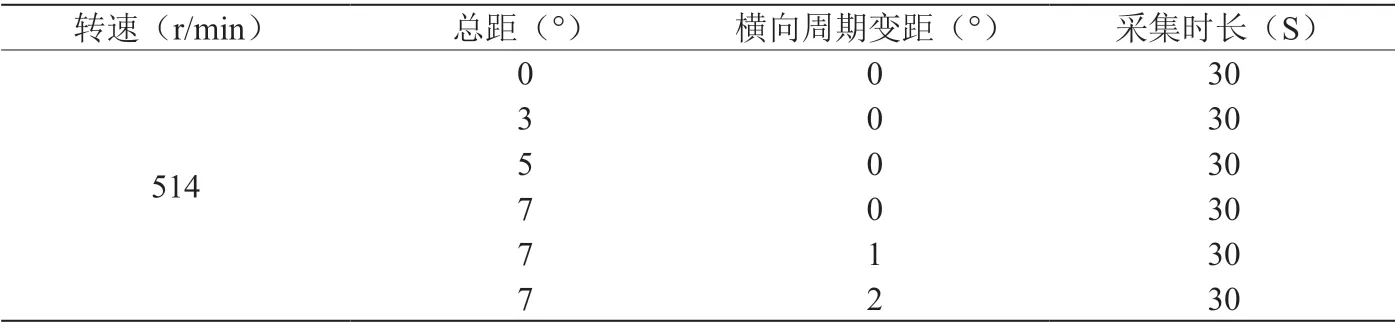
表1:测量旋翼运动参数试验状态
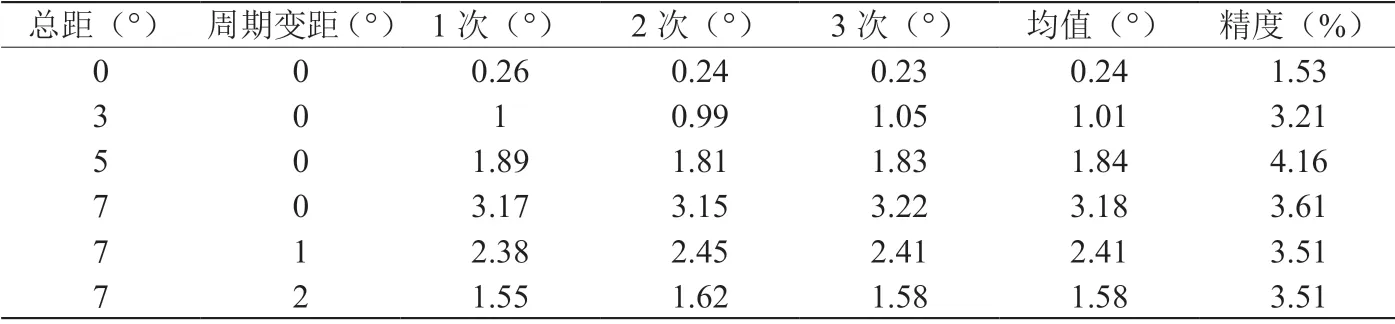
表2:挥舞角在不同状态下多次测量结果
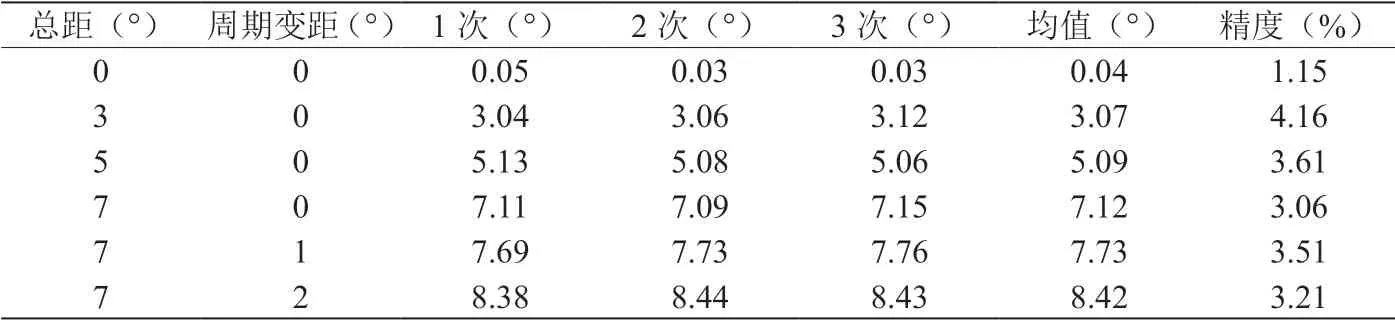
表3:扭转角在不同状态下多次测量结果
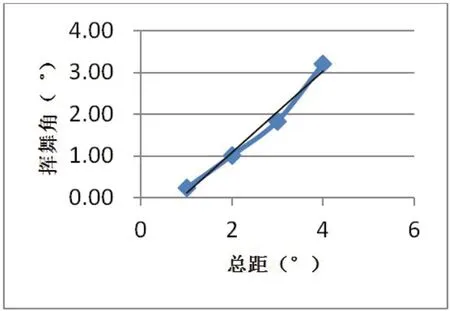
图7:挥舞角随总距的变化

图8:摆振角随总距的变化

图9:挥舞角随横向周期变距的变化
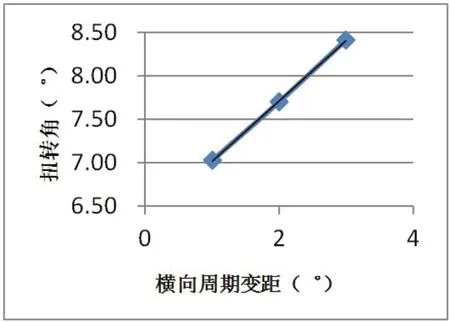
图10:摆振角随周期变距的变化
标记点背面涂敷对桨叶无损伤的高强度黏合剂,保证高气流下与被测物体表面紧密结合,黏合剂分布均匀、无间隙,背胶应在高低温情况(-30℃~60℃)下保持良好粘附性;标记点表面覆哑光膜,保证在强光下不反光。哑光膜与标记点表面粘合采用特制强力胶,保证均匀、密封、平整,在高气流下不被冲掉。如图3所示为桨叶下表面标记点粘贴图。
3.4 测试设备安装调试
3.4.1 光源安装调试
试验选用大光源1 个,功率约为2KW,可满足高速相机快门调至10 微秒以内正常使用。光源放置于升降平台上,升降平台升至最近的安全距离。通过调试确保光源照射到桨叶下表面,使桨叶表面特征标记点能清晰成像。如图4所示。
3.4.2 相机的安装调试
首先在地面进行相机参数标定,包括确定测量幅面、确定相机间距和测量距离、相机焦距及光圈等参数。如图5所示为相机在地面进行参数标定情形。
视频图像采集设备在完成地面参数标定后,再进行旋翼试验塔顶部工作平台试验安装,安装示意图如图6所示。
4 试验实施及结果分析
4.1 试验状态
为验证视频图像方法测量不同试验状态下旋翼运动参数的有效性,结合实际情况,最终确定旋翼动力学试验的试验状态如表1所示。
4.2 试验结果分析
在横向周期变距为0°状态下,得到挥舞角、摆振角随总距变化趋势分别如图7、图8所示。从图中可看出,在固定的横向周期变距状态下,旋翼挥舞角、摆振角随着总距增大而增大。
在总距为7°状态下,得到挥舞角、摆振角随随横向周期总距的变化趋势分别如图9、图10所示。从图中可看出,在固定总距状态下,旋翼挥舞角随横向周期变距变大而减小,摆振角随着横向周期变距变大而增大。
挥舞角、扭转角在不同总距和横向周期变距状态下的多次测量值如表2、表3所示。
从表2、表3可知,挥舞角、扭转角在不同总距和横向周期变距状态下经多次测量其精度均在在5%以内,满足工程试验应用要求。
5 结论
通过在直升机旋翼动力学试验中的应用研究表明,本文提出的使用视频图像方法测量旋翼运动参数取得了较理想的测量效果,测量平均精度达到了5%满足工程应用的使用要求,但由于受模型旋翼桨叶状态的影响,验证试验选取的总距及横向周期变距较小,致使测得的摆振角变化不明显,因此本次试验未对摆振角的变化情况进行有效分析,下阶段将借助于其他旋翼桨叶继续加强这方面的应用研究,使该视频图像方法能更好的在旋翼动力学试验中得到更广泛的应用。
