连续混沌系统的修正函数投影同步及其电路仿真
2019-08-21李德奎
李德奎
(甘肃中医药大学理科教学部,甘肃定西743000)
1990年,PECORA和CARROLL提出混沌同步概念[1],为混沌在保密通信、非线性系统性能最优化、生态系统、人工神经网络、系统辨识和模式识别等领域的应用奠定了基础[2]。此后完全同步[3]、反同步[4]、广义同步[5]、投影同步[6-8]、函数投影同步[9-11]、修正函数投影同步[12-13]等混沌同步方式被广泛研究。修正函数投影同步是驱动系统和响应系统的不同变量对之间以不同的函数比例同步一致。所以修正函数投影同步不仅是最复杂的同步方式,也是完全同步、反同步、广义同步、投影同步、函数投影同步等的一般形式,也就是说如果驱动与响应系统之间满足修正函数投影同步条件,那么其他的同步方式也能够在驱动系统与响应系统之间实现。
混沌同步的电路实现是混沌应用的前提,近年来,混沌吸引子的电路设计与实现得到广大学者的青睐,主要表现在高维多翼混沌吸引子和分数阶混沌吸引子的电路设计[14-20]。然而研究混沌同步电路的文献很少,据作者所知,尤其是研究混沌系统修正函数投影同步的电路设计的文献几乎没有。为此,本文研究任意连续混沌系统的修正函数投影同步,同时基于Multisim电路仿真平台,设计四维超混沌系统CYQY的修正函数投影同步的仿真电路,为连续混沌系统的修正函数投影同步在保密通信中的应用奠定电路基础。
1 修正函数投影同步定义
考虑非线性驱动系统为:

耦合的响应系统为:

如果对于驱动系统(1)和响应系统(2)的任意初值条件,和任意给定的函数对角矩阵,

使得,

则称驱动系统(1)和响应系统(2)实现修正函数投影同步,对角矩阵α称为修正函数投影同步的比例函数矩阵。设驱动系统(1)和响应系统(2)的修正函数投影同步误差为:

2 修正函数投影同步实现
根据驱动系统(1),构造耦合响应系统(2)为:

其中k=diag(k1,k2,…,kn)为反馈增益矩阵。根据(3)式和(4)式,驱动系统(1)和响应系统(4)的误差系统为:
构造Lyapunov函数,

显然,V是正定的,V的变化率为:

易知只要反馈增益矩阵k正定,即ki>0(i=1,2,…,n),就有V·(t)<0,根据Lyapunov稳定性定理,说明误差系统(5)的零解是全局渐近稳定的,即驱动系统(1)和响应系统(4)实现修正函数投影同步。
3 数值仿真
以超混沌CYQY系统作为驱动系统进行数值仿真,其动力学方程为:

其中a,b,c,r,h,σ 为系统参数,当a=35,b=25,c=5,r=35,h=4.9,σ=100时,系统(8)处于超混沌运动状态,任意选取系统的部分相图如图1所示。选取反馈增益对角矩阵k=diag(a,1,h,1),根据(4)式可得响应系统的动力学方程为:
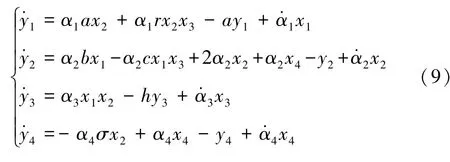
其中参数a,b,c,r,h,σ 与(8)式中相同参数的取值相同,y1,y2,y3,y4为响应系统的状态变量。反馈增益矩阵k=diag(a,1,h,1)=diag(35,1,4.9,1)正定,满足驱动系统和响应系统实现修正函数投影同步的充分条件。任取比例函数矩阵α为:
任取驱动系统(8)和响应系统(9)的初值条件分别为[x1(0);x2(0);x3(0);x4(0)]=[2;3;-1.3;1]和[y1(0);y2(0);y3(0);y4(0)]=[-2;1;1;-5]。利用四阶龙格库塔法,可以绘制驱动系统(8)和响应系统(9)的相图,选取驱动系统(8)和响应系统(9)的部分相图分别如图1和图2所示。

图1 驱动系统(8)的相图Fig.1 The phase diagrams of the drive system(8)
从图1、图2看出,驱动系统(8)和响应系统(9)对应状态变量的相图相差较大,一方面驱动系统相图的曲线轨迹和响应系统的相图的曲线轨迹不同,另一方面从坐标轴上看,响应系统的相图比驱动系统的相图大,同时这种大小不是同比例放大,大小关系没有什么规律。判断驱动系统和响应系统实现修正函数的依据是同步误差趋向于零。为此,根据所给的比例函数矩阵(10)式,将修正函数投影同步误差(3)重写为:
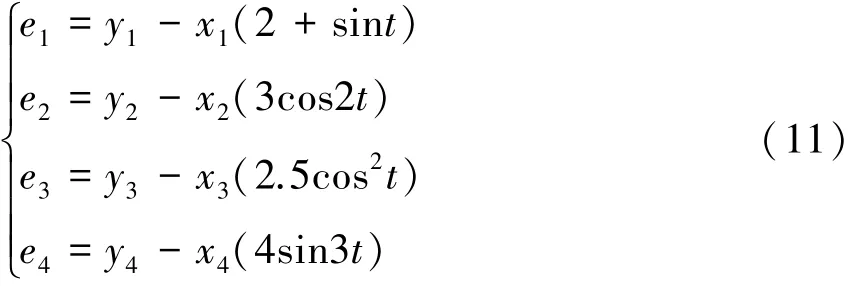

图2 响应系统(9)的相图Fig.2 The phase diagrams of the response system
基于Matlab数值仿真软件,根据(8)、(9)和(11),绘制驱动系统(8)和响应系统(9)的修正函数投影同步误差曲线如图3所示。
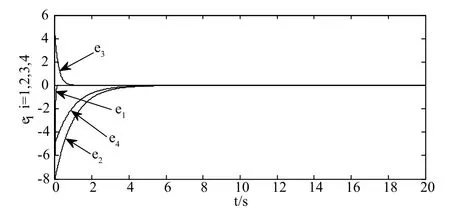
图3 修正函数投影同步误差曲线Fig.3 The error cures of the modified functional projective synchronization
从图3可以看出,尽管驱动系统(8)和响应系统(9)的相图差异较大,但是在同步比例函数矩阵α的缩放下,修正函数投影同步误差ei(i=1,2,3,4)在6秒之内稳定收敛于0,说明驱动系统(8)和响应系统(9)在6秒之内实现修正函数投影同步,既修正函数同步的收敛速度快,又同步效果好,说明了理论分析结果的正确性,即实现连续混沌系统修正函数投影同步的充分条件是增益矩阵正定。
4 电路仿真
利用Multisim电路仿真平台,仿真驱动系统(8)的相图、响应系统(9)的相图和修正函数投影同步的误差曲线。考虑到运算放大器TL084CN和乘法器AD633的电压限制,同时为了示波器中观察到更加清晰的图像,把混沌信号的电压调小到原来变量的1/50,设u1=x1/50,u2=x2/50,u3=x3/50,u4=x4/50,v1=y1/50,v2=y2/50,v3=y3/50,v4=y4/50,变换后的驱动系统(8)和响应系统(9)分别为:

根据同步误差(11),驱动系统(12)和响应系统(13)的修正函数投影同步误差为:
为了实现式(12)、(13)和(14)中的微分、加减法和乘法等运算,利用同相加法器、反向加法器、积分运算器和乘法器等,构造驱动系统和响应系统修正函数投影同步的仿真电路,运算放大器型号均为TL084CN,乘法器的型号均为AD633,运算放大器的供电电压为 ±12V,其它电子元件的值和电路的连接方式如图4和图5所示。
按照(12)和(13)式,基于电路设计的模块化方法,将图4、图5所示的电路模块按对应的输入输出端连接起来,形成驱动系统(12)和响应系统(13)的修正函数投影同步的仿真电路,将电路仿真结果输出到电路示波器,示波器输出同步时间序列曲线、驱动系统的相图和响应系统的相图分别如图6、图7和图8所示。

图4 驱动系统(12)的电路图Fig.4 The circuit diagrams of the drive system(12)
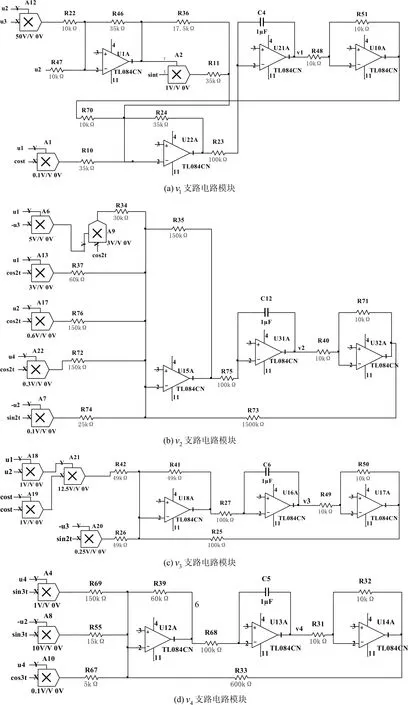
图5 响应系统(13)的电路图Fig.5 The circuit diagrams of the response system(13)
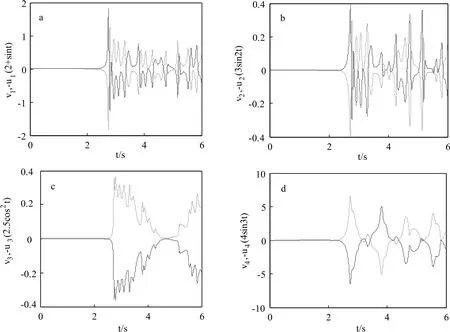
图6 驱动-响应系统的时间序列图Fig.6 The time-series diagrams of the drive-response systems
从图6可以看出,v1与-u1(2+sin t)、v2与-u2(3sin2t)、v3与-u3(2.5cos2t)、v4与-u4(4sin3t)的时间序列波形图分别关于横轴对称,说明(14)式所示的修正函数投影同步误差均能够趋向于零,说明所设计的仿真电路,能够仿真了驱动系统(12)和响应系统(13)的修正函数投影同步。

图7 示波器输出的驱动系统(12)的相图Fig.7 The phase diagrams of the drive system on oscilloscopes

图8 示波器输出的响应系统(13)的相图Fig.8 The phase diagrams of the response system on oscilloscopes
由于运算放大器TL084CN和乘法器AD633的电压限制,电路仿真时将混沌信号的电压调小到原来变量大小的1/50,所以图7和图8所示的驱动系统(12)和响应系统(13)相图和数值仿真的相图形状相同,大小是数值仿真相图的1/50。图6、图7和图8所示的电路仿真结果表明,驱动系统(12)和响应系统(13)修正函数投影同步的电路实现是可行的,同时电路的设计是正确的。
5 结论
本文研究连续混沌系统修正函数投影同步的电路仿真问题,得到如下结论:
(1)得到连续混沌系统实现修正函数投影同步的一个充分条件:只要反馈增益矩阵正定,驱动-响应系统能实现修正函数投影同步,实现修正函数投影同步的条件简单且易满足。
(2)示波器输出的驱动系统相图、响应系统相图和时间序列波形图与数值仿真的一致,说明设计的修正函数投影同步的仿真电路是正确的,为连续混沌系统的修正函数投影同步在保密通信等领域的应用奠定了电路基础。
