一类具有Allee效应的捕食-食饵模型正解的唯一性和渐近行为
2019-08-21李海侠
李海侠
(宝鸡文理学院数学与信息科学学院,陕西宝鸡721013)
本文讨论如下捕食-食饵扩散模型:

其中Ω是RN中带有光滑边界∂Ω的有界区域,u和v分别表示食饵和捕食者的浓度,a和d分别是u和v的最大增长率。是加法Allee效应项,m和n是Allee效应常量,反映了Allee效应的强弱程度;若m>br,则表现为强Allee效应,若m<br,则表现为弱Allee效应。是Crowley-Martin(C-M)反应函数,是一类依赖捕食者的经典反应函数之一。它与Beddington-DeAngelis(B-D)反应函数很像,不同之处在于分母多了体现物种间相互干扰的一项bcuv。而且,C-M反应函数认为无论某个捕食者目前是否寻找或处理食饵,都允许存在捕食者间的干扰,这是比B-D反应函数优越之处,也非常符合现实中的一些生物现象。因此研究带有C-M反应函数的模型具有很大的生物意义。系统(1)中的参数a,m,n,b,c,d,p,q,k都是正常数。u0(x),v0(x)是连续函数。
近年来,随着全球环境的不断变化,很多种群会受到Allee效应的影响。Allee效应会影响种群系统的稳定性,甚至导致某些种群灭亡。因此,具有Allee效应的模型受到了生物学家和数学家的广泛关注[1-8],其中文献[4-6]在齐次Neumann边界条件下讨论了具有加法Allee效应的捕食-食饵模型,文献[7]讨论了具有加法Allee效应和B-D反应函数的捕食-食饵模型,利用稳定性理论得到了正解的唯一性和稳定性。然而由于加法Allee效应项的引入使得系统的研究变得复杂,所以目前在齐次Dirichlet边界条件下对带有加法Allee效应和C-M反应函数的捕食-食饵扩散模型的研究很少见。
鉴于此本文主要讨论系统(1)的渐近行为以及系统(1)对应平衡态系统

正解的唯一性和稳定性。
1 正解的存在性
本节利用不动点理论给出系统(2)正解存在的条件。先给出一些预备知识。
令λ1(q)是-Δ+q(x)在Ω上关于齐次Dirichlet边界条件下的主特征值,则λ1(q)是单重的。而且,如果q1(x)≤q2(x)且q1(x)≢q2(x),则λ1(q1)<λ1(q2)。简单起见记λ1(0)=λ1。
众所周知如下问题

当a>λ1时,式(3)存在唯一正解,记为(a,r)。而且(a,r)<。特别地,记(a,1)为a。
考虑单物种问题

易知当m<n2,a>λ1+时,式(4)存在唯一正解,记为。而且<a<a。同理,当d>λ1时,系统(1)存在半平凡解(0,)。简单起见记为。因此,在一定条件下系统(2)存在两个半平凡解(,0)和(0,)。
首先由特征值的比较原理给出系统(2)正解存在的必要条件。由于证明是基本的,所以在此省略。
引理1如果(u,v)是系统(2)的正解,则a>λ1,d> λ1。
接着利用上下解方法有如下正解的先验估计。
引理2系统(2)的任意正解(u,v)满足u≤a<a,v~≤v≤d<d。
证明由系统(2)的第一个方程得
-Δu≤u(a-u),x∈Ω;,u=0,x∈∂Ω,于是根据a的唯一性和上下解方法有u≤a<a。同理可得v~≤v≤d<d。
为了利用度理论我们引入如下空间

定义算子Aτ:E→E为
其中τ∈[0,1],q是充分大的正常数。显然Aτ是紧算子。记A=A1,则易知A:D→W是连续可微算子。
系统(2)在平凡解和半平凡解处的指数计算证明与文献[7]中的引理3类似,所以在此省略。
引理3(i)设a≠λ1+,d≠λ。若a>λ+11或d>λ1,则indexW(A,(0,0))=0;若a<λ1且d<λ1,则indexW(A,(0,0))=1。
(ii)indexW(A,D)=1。
(iii)设m<n2,a>λ1+。 若d> λ1,则indexW(A,(u~,0))=0; 若d< λ1,则indexW(A,(,0))=1。
(iv)设d>λ1。若a>λ1,则indexW(A,(0,v~))=0; 若a< λ1则indexW(A,(0,v~))=1。
于是
定理1如果
m<n2,a> λ1,d> λ1,
则系统(2)至少存在一个正解。
证明由已知条件和引理3有
因此根据不动点指数的可加性知结论成立。
2 正解的唯一性和稳定性
我们研究当c充分大时,系统(2)正解的唯一性和稳定性。考虑如下问题

引理4设m<n2,a>λ1+,d> λ1。 则系统(5)存在非退化且线性稳定的唯一正解(,)。这里是如下问题的唯一正解

证明根据文献[9]定理2.1(iii)可知正解的存在性和唯一性显然。令L(,)是系统(5)在(,)处的线性化算子,则
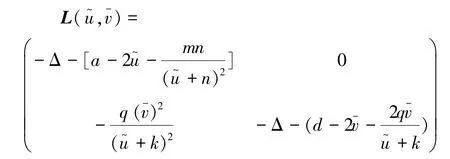
若m<n2,则


因此,σ(L(u~,v-))>0。 故结论成立。
最后给出系统(2)正解的唯一性和稳定性结果。
定理2设m<n2,a>λ1()+,d> λ1。则当c充分大时,系统(2)存在唯一正解且线性稳定。
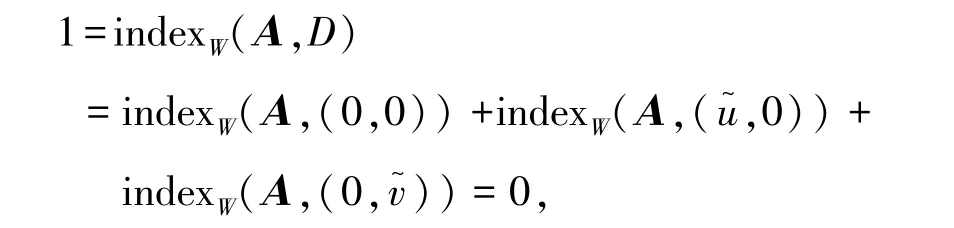
证明首先由定理1可知系统(2)存在正解。显然当c充分大时,系统(2)是系统(5)的正则扰动。于是根据引理4和扰动理论可知系统(2)的任意正解非退化且线性稳定。又根据紧性理论和假设可知系统(2)至多有有限个正解。记为{(ui,vi):0≤i≤n}。 通过以上讨论可知,I-A′(ui,vi)在(ui,vi)上可逆,且A′(ui,vi)没有大于1的实特征根。又因为(ui,vi)=S(ui,vi),所以A′(ui,vi)在(ui,vi)上没有α性质。故根据文献[10]的定理1有indexW(A,(ui,vi))=1。最后根据引理3和度的可加性得
1=indexW(A,D)=(A,(ui,vi))+0=n,因此系统(2)存在唯一正解。
3 渐近行为
利用抛物方程的比较原理讨论系统(1)的灭绝性和持久性。首先讨论平凡解和半平凡解的稳定性以及系统的灭绝条件。
定理3(i)若a≤λ1且d≤λ1,则当t→∞时,(u,v)→(0,0)。而且,若a>λ1+或d> λ1,则(0,0)不稳定;若a<λ1+且d<λ1,则(0,0)稳定。
(ii)设m<n2,a>λ1+。 若d≤λ1,则当t→ ∞时,(u,v)→(,0)。 而且,若d> λ1,则(,0)不稳定;若d< λ1,则(,0)稳定。
(iii)设d> λ1。 若a≤λ1,则当t→∞时,(u,v)→(0,v~)。 而且,若a> λ1()+,则(0,)不稳定;若a<λ1()+,则(0,)稳定。
证明由于证明类似,故在此只证明(ii)。因为m<n2,a> λ1+且


则由前提d≤λ1和比较原理得当t→∞时,v(x,t)→0。 于是存在T′ε≥0使得当t>Tε′时,v(x,t)<ε。则
于是利用ε的连续性和比较原理可知当t→∞时,u(x,t)→。
最后证明稳定性结果。考虑如下特征值问题
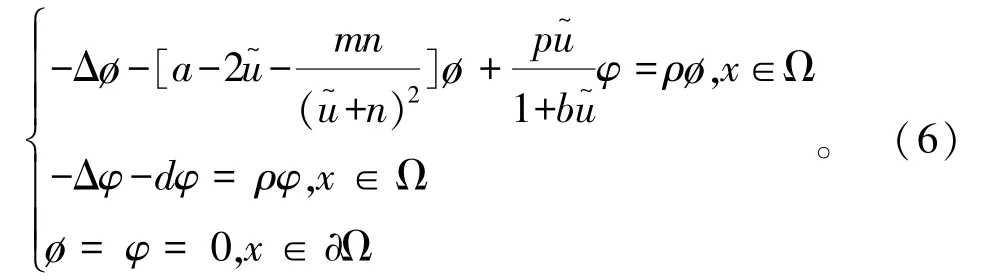
易知特征值问题(6)的特征值ρ1=min{λ1(-a+2+),λ1(-d)}。同引理4的证明可知λ1(-a+2+)>0。当d>λ1时,λ1(-d)=λ1-d<0,所以(u~,0)不稳定。 当d<λ1时,λ1(-d)=λ1-d>0,所以(,0)稳定。
这节最后给出系统(1)持久性条件。
定理4若m<n2,a>λ1++,d> λ1,则存在(,)和(,)使得

和方程组

证明首先易知f(u,v)=(u[a-u--],v(d-v-))混拟单调。由上下解定义可知(,)和()是系统(1)的一对上下解。 而且,(f(u,v),g(u,v))在[]×[,]上满足Lipschitz条件。于是根据单调迭代方法得满足式(7)和(8)的函数对(,和(,)存在。

且vt-Δv≤v[d-v-]。于是sup v(x,t)≤。 因此存在Tε′≥0使得当t>Tε′时,

另外,由系统(1)可知
再次由比较原理可知

于是存在Tε″≥0使得当t>Tε″时,

最后,令T*={Tε,Tε′,Tε″}。 对于所有的t>T*和ε >0,由式(9)-(11)得

令ε→0,根据文献[11]中的性质2.1和定理2.1知结论成立。
