无人机载LiDAR在风电场道路勘测设计中的应用研究
2019-08-20张杰
文 | 张杰
目前 ,一些用于风电场道路勘察设计的传统测绘方法无法得到植被密集地区的地表情况。例如,采用数字摄影测量方法制作地形图,在森林地区作业时(需要航空摄影测量)面临着诸多困难,如外业控制、加密选点、影像匹配以及立体测图等。而且数字摄影测量方法采集高程点信息的工作量大、劳动强度大、工作效率较低,难以满足风电市场的快速需求。在风电场工程建设中,因大部件运输改扩建道路造成房屋拆迁及林木砍伐的情况普遍存在。业主和施工单位由于无法获得建设前的实际空间数据,不能将房屋拆迁及林木砍伐费用纳入预算,导致成本增高。
近年来,无人机激光雷达(unmanned aerial vehicle,UAV)技术快速发展,在全球范围内引起了广泛关注,很多组织机构或个人开始研制、集成多种形式的无人机激光雷达系统,用于快速地形测量、地表变化监测等业务。无人机激光雷达具有广阔的应用前景,特别是对于不易到达的区域,无人机具有更为显著的优势。LiDAR(light detection and ranging激光雷达)点云数据具有高精度、高密度的特点。实践证明:其高程精度可达到0.2米左右,高于数字摄影测量方法的地形数据精度。风电项目一般采用1:2000地形图进行规划设计,因此采用点云数据生成地形图的精度完全符合设计要求。随着无人机激光雷达技术的不断发展,基于点云数据生成的数字化三维模型可实现风电场的智能选线、生成的房屋单体化数据可精确测量房屋拆迁面积、生成的单木分割数据可精确计算砍伐量,因而能够有效提高风电场道路勘察设计智能化水平,提高运检效率,保护风电场走廊免受非法侵害。利用无人机搭载机载LiDAR生成数字化风电场走廊,能产生良好的经济效益和应用前景。
无人机载LiDAR理论基础
一、无人机载LiDAR系统组成
无人机激光雷达系统通常配备激光扫描仪、高精度全球导航卫星系统、惯性测量单元 (global navigation satellite system,GNSS & inertial measurement unit,IMU)和光学相机等载荷,激光扫描仪能够获取地物的三维点云数据,高精度GNSS & IMU提供姿态和位置信息,用于解算激光点云三维位置,光学相机用于地物类型识别以及结构信息提取。随着微型激光扫描仪、GNSS & IMU 集成系统的快速发展,出现了多种轻小型无人机激光雷达系统,采用高精度 GNSS& IMU 是提高激光雷达定位精度的关键,集成 GNSS、IMU的混合测量单元(hybrid measurement unit,HMU)已经能够达到厘米级定位精度。无人机自动巡航系统能够实时地获取飞行器位置、速度和姿态信息,并反馈给飞行控制系统,使得飞行器沿着预定航线飞行。

图1 无人机载LiDAR系统组成
二、激光测距原理
激光测距就是测量激光光束在测距仪与被测物体表面之间的往复距离,已知光速常量的前提下,核心问题就是确定激光在空间中的飞行时间,所以时间精度直接影响测距精度。
激光测距主要采用脉冲式,即通过精确记录通过激光发生单元发出的激光脉冲的发射时间,及该脉冲经过被测物体表面产生反射再次被传感器接收的时间,以确定激光脉冲的飞行时间(Time of Flight),并进一步推算测距数据,其测距原理如图2所示。测距公式为:

式中,C为光速;Δt为发射波与反射波的时间差。
三、LiDAR在风电场中的应用流程
利用LiDAR技术进行风电场道路勘察设计的方法大致如下:首先,将无人机LiDAR设备获取的原始数据进行航迹解算和三维点云解算,对生成的三维点云进行航带拼接、去噪,利用点云滤波算法提取地面点生成DEM,对线路规划决策的影响要素进行参数化和数字化,基于人工智能的方法搜索代价最小的路径,并借助于领域专家的知识,对决策要素的参数化和目标函数做进一步优化,形成一套自动化程度较高的路径规划方法,为线路规划设计提供参考方案。其次,将获取的点云数据构建线路廊道三维场景,设计人员即可在三维场景中针对规划方案进行风电场优化选址作业和线路规划。最后,在规划好场外和进场的最优线路后,对场外和进场的线路廊道内的建筑物进行单体化以精确测量房屋拆迁面积;对植被进行单木分割以精确计算砍伐量。LiDAR在风电场道路勘察设计中的工作流程如图3所示。
四、数据应用
基于LiDAR采集的高密度、高精度点云数据,可提供风电场整体区域的相关基础数据和规划方案。
(1)数字线划图(DLG)的制作。LiDAR数据可满足最高1:500DLG的制作,高精度的DLG可应用于对拟定机位点风能资源的模拟,计算出该拟定点的全年发电量,对单机及整场的发电量进行精准评估。
(2)道路数据采集及重建。对进场外围道路进行扫描,获取进场道路全信息的基础数据,利用三维技术对道路及周边设施进行重建,生成三维实景模型。将运输车辆及部件模型放入实景模型内进行运输模拟,标注无法避免的碰撞点和高危点,在设备进入前对危险点采取相应的拆除、扩建、转移和修理等措施。
(3)场内运输道路规划。根据前期预规划的进场路线设置飞行航线,实现对场内运输道路的扫描。采集的数据可进行地形重建,针对风电场道路修建的标准对选取的道路进行精确评估,按照修建标准即时调整,确认最优路线。
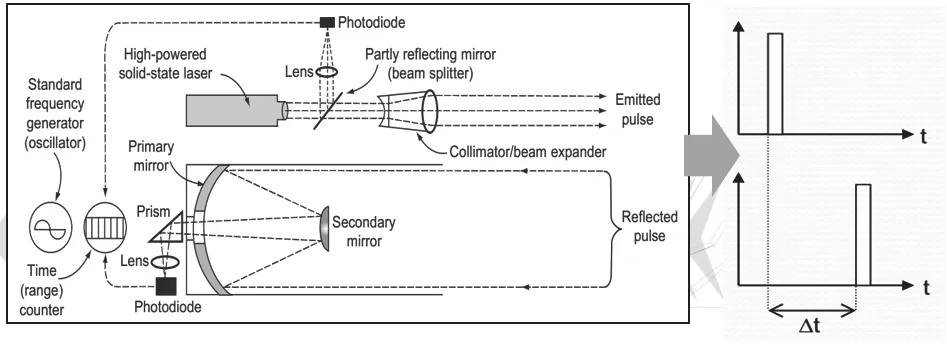
图2 脉冲式测距原理
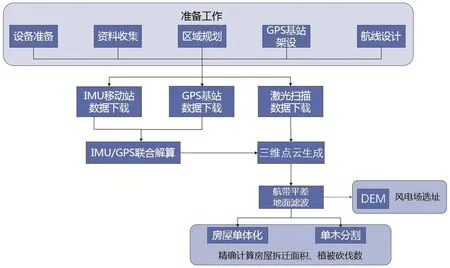
图3 LiDAR应用于风电场道路勘察设计的工作流程
(4)土方工程量计算。传统计算土方量的方法最难做到的就是去植被,人为对树木高度的预估和植被不同朝向的长势对土方量的精确计算影响很大。LiDAR数据可以穿透植被打到地面,极大降低了人为因素的影响,可以精准预估开挖的土方量。基于点云数据生成三角网格可以对风电机组平台开挖回填和道路施工的土方量进行评估,更精准的工程量预估可以降低工程预算,在竞争中更具优势。
应用案例
一、测区概况
本项目为金风科技数字化风电场数据获取处理项目,涉及场外、进场线路的约90平方公里区域面积。测区地形包括平地和山地,山坡植被茂密,覆盖率高,平原地区有大面积房屋建筑,主要为居民区和厂区,地形地貌复杂多变(图4)。项目最终成果比例尺为1 2000,进场通道的每平方米点数为30。外业采集时间为2018年7月。
二、外业数据采集
(一) 前期准备
在外业数据采集阶段,首先需要进行前期准备,前期准备工作主要包括任务分配及人员分组、测区资料搜集、实地踏勘、基站位置设定(图5)以及制定详细作业方案等几个部分。其中测区资料的搜集、测区实地踏勘以及详尽的作业规划三方面工作至关重要。
1.测区资料搜集
在作业前期对测区的资料进行搜集,包括测区的地形图、航拍或卫星影像等,对测区的面积以及分布性状有初步了解。同时需要了解当地气候气象信息,以参考确定设备运行的最佳环境,并依此设定对应的作业方案。
2.测区实地踏勘

图4 湖南大马风电场区域示意图

图5 基站架设

表1 LiAir200设备参数
根据初期获取的测区资料进行实地踏勘,实地调查测区内的地物分布状况,此工作开展的细致程度对于激光雷达数据的获取具有重要影响。根据地物的分布疏密以及重要性(重要性较低的地物可以适当降低扫描密度,以减少数据冗余;较重要地物,可适当提高扫描密度,以获取更多的细节信息),设定后期作业扫描模式。
3.作业方案规划
在完成先期准备的基础上,根据项目要求,对整个外业数据采集工作进行方案制定,基于实地踏勘的情况,制定运行参数以及无人机航线规划。其中包括根据地形、地势设定无人机航高、航速及航线间隔,激光雷达设备的扫描频率及扫描速度。
大马风电场区域数据采用北京数字绿土科技有限公司的无人机激光雷达LiAir200设备扫描获取,设备参数如表1所示。
(二) 航线设计
航线的设计和激光雷达数据采集分为场外(图6)和进场区域(图7)两部分。
三、激光点云数据处理成果
(一)场外数据成果
该项目采用LiDAR360软件进行激光点云数据后处理,分为场外数据处理和进场数据处理。将上述解算出的三维激光点云数据和POS数据导入LiDAR360软件中进行去噪和航带拼接。计算结果如下:
1. DEM生成
通过渐进三角网加密法提取出地面点后,对地面点利用不规则三角网空间插值获得连续变化的数字高程模型DEM(图8)。场外区域高差起伏较小,地形比较平坦。
2.房屋单体化、单木分割
通过过滤地面点云数据以实现地物分离,再从非地面点中提取建筑物点云,给不同建筑物进行赋色,并从中获取建筑物面积信息,实现建筑物轮廓提取与规则化,从建筑物点云中获取建筑物屋顶形状,实现建筑物的单体化(图9)。

图6 场外区域无人机航线设计
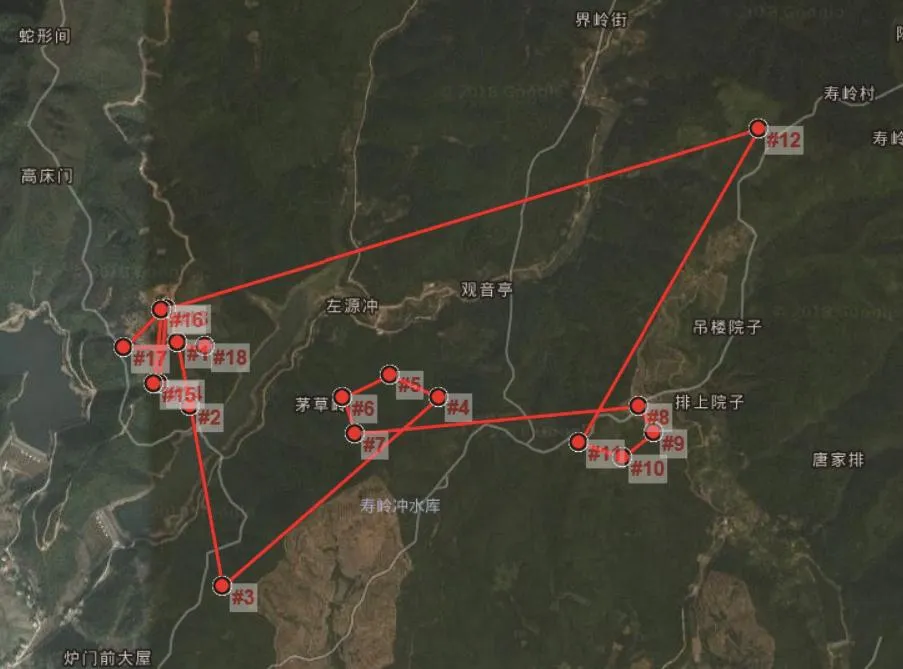
图7 进场区域无人机航线设计
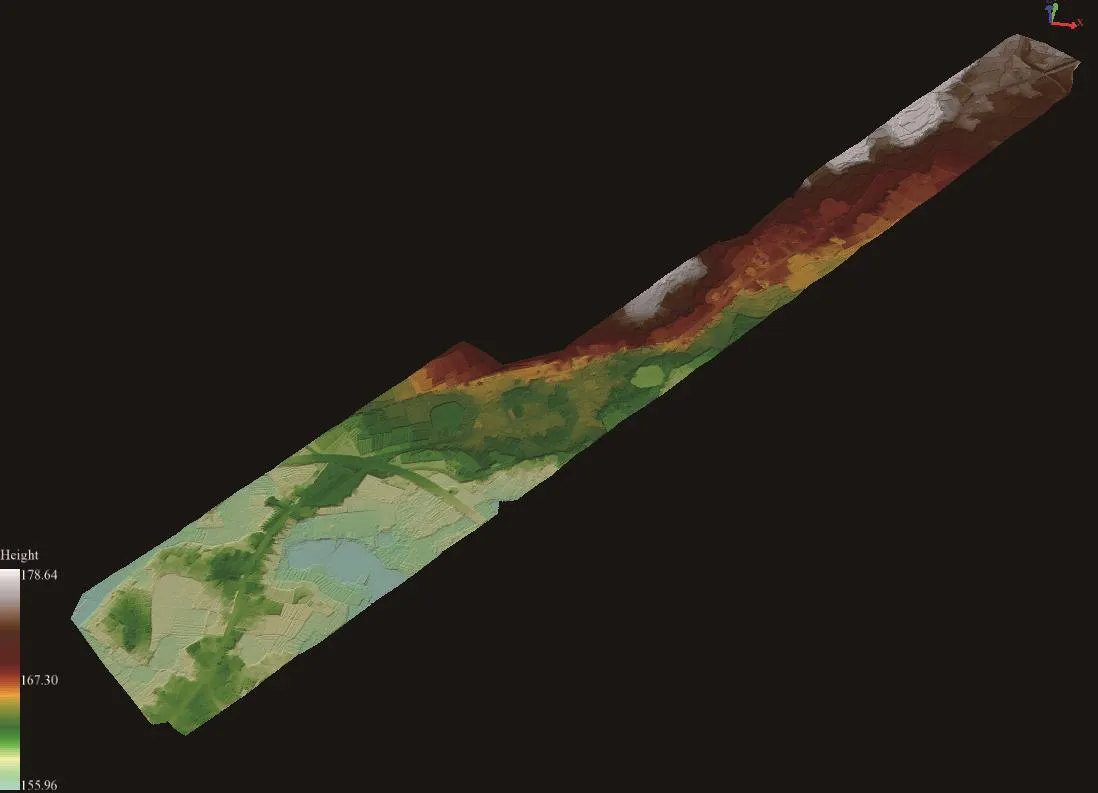
图8 场外区域DEM

图9 场外区域房屋单体化
对原始点云去除噪点后,进行点云滤波提取出地面点,并生成DEM,通过对点云数据进行归一化处理,消除地形对单木提取结果的影响,使提取的单木高度数据更加准确。利用LiDAR360软件机载林业模块的基于点云单木分割工具,将原始点云分割为单棵的树木点云(图10),按照不同的树木ID给点云赋色,获得树木的总数,同时生成单木的点位、高度、冠幅等信息(图11)。
(二)进场数据成果
1. DEM生成
将进场区域的点云数据提取出地面点后,对地面点进行不规则三角网空间插值获得数字高程模型DEM(图12),对道路两边树木进行单木分割(图13)并提取树木位置等相关有效信息(图14)。进场区域面积约4平方公里,进场区域相较于场外区域地形起伏较大,高差约290米。
2.三维建模
基于点云数据,对运输道路两边的房屋、树木等重要设施进行三维重建(图15),在工程动工前期全面掌握相关情况,对需要改扩建、拆迁的进行统计,做出合理规划。
3.模拟运输
在点云数据的支持下,可对道路进行碰撞检测模拟(图16),将无法预见的外部工作在电脑上提前完成,以规避风险。
结语
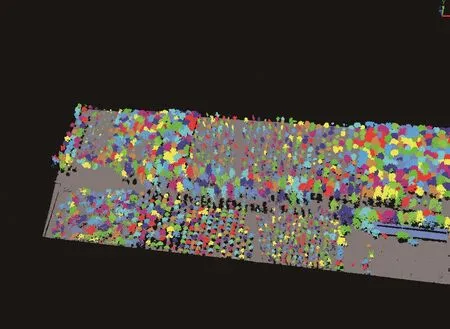
图10 场外区域单木分割
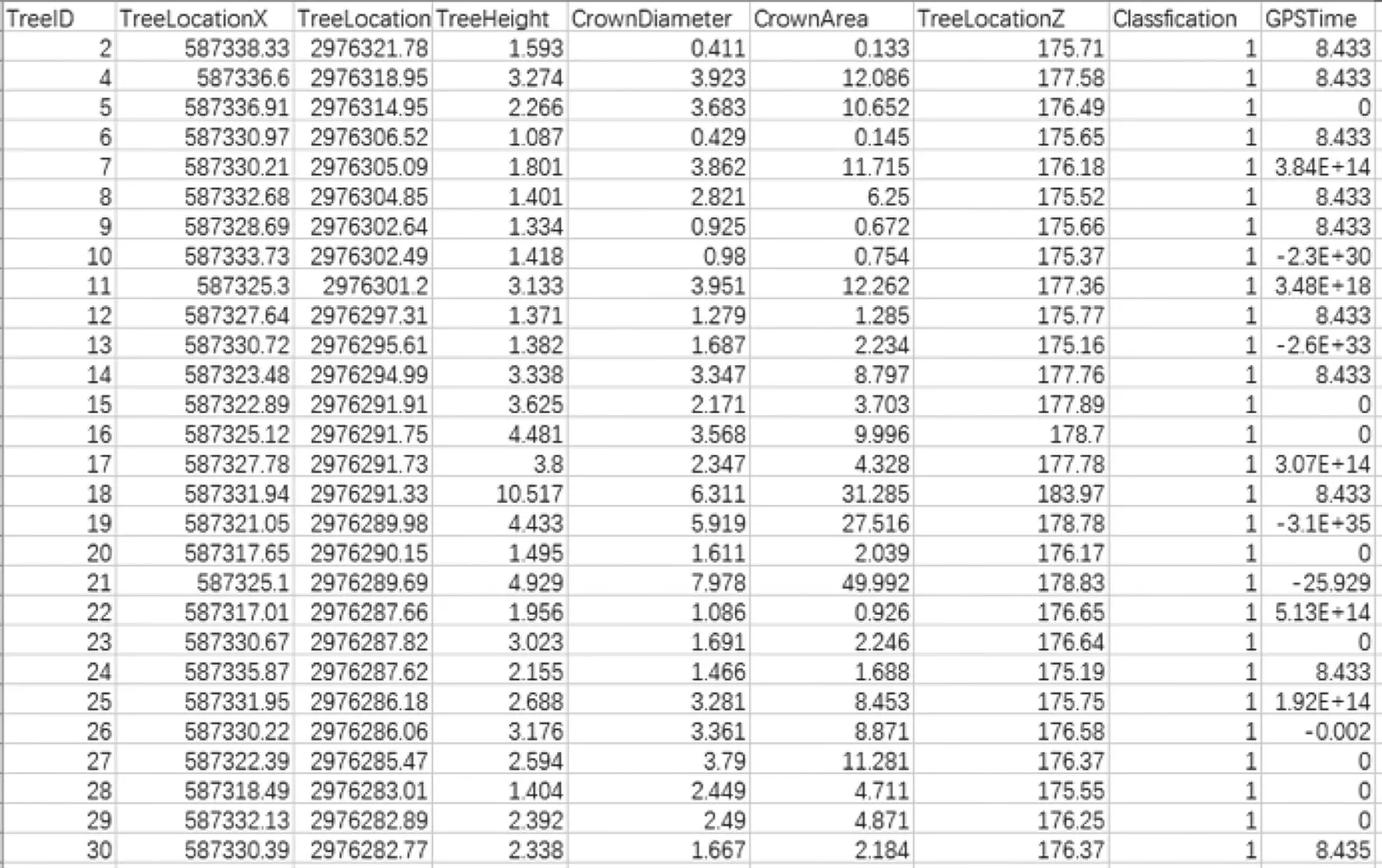
图11 场外区域单木分割成果

图12 进场区域DEM
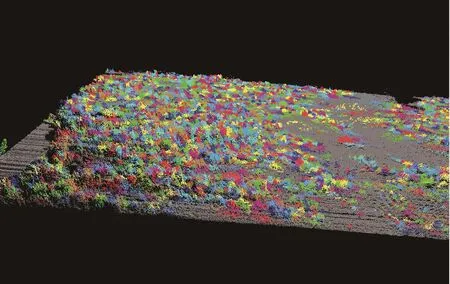
图13 进场区域单木分割

图14 进场区域单木分割成果

图15 进场道路两侧三维建模成果

图16 进场道路模拟碰撞检测
将激光雷达点云数据应用于丘陵、山地地区优势明显,可以解决地形数据采集工作量大、劳动强度大、工作效率低等问题。本文通过介绍 LiDAR技术在湖南大马风电场项目中的实际应用,说明了 LiDAR技术在风电场项目中应用的可行性。综合分析可知,LiDAR技术与风电场项目结合具有极大的优势,通过测量精度的增加,可以在各环节降低成本。随着风电行业竞价上网的趋近,市场对成本的控制越来越严格,激光雷达技术必将在风电行业中得到更加广泛的应用。