无人驾驶车辆路口行驶决策研究
2019-08-15苏冲孟祥雨张成阳
苏冲,孟祥雨,张成阳
(北京汽车研究总院有限公司,北京 101300)
前言
在城区环境中,迄今为止,无人驾驶车辆的决策策略仍然是一个尚未得到解决的研究热点。无人驾驶车辆的行为决策策略是该领域研究的关键技术之一。在城区环境中,无人驾驶车辆行为决策的最终目标是像熟练的驾驶员一样产生安全、合理的驾驶行为。本发明给出一类无人驾驶车辆路口行驶策略,能够使无人驾驶车辆在城区环境中安全、合理地完成一定范围的驾驶行为。
本文提供了一种无人驾驶车辆路口行驶策略和系统,以电动汽车为平台,集成激光雷达、毫米波雷达、摄像头、超声波雷达、GPS 惯导定位系统等传感器,实现道路环境信息准确感知,通过多传感器信息融合技术将这些信息进行集成,并结合高精度地图和导航,提高信息输出的稳定性和准确性。实现无人驾驶车辆在各个特定路口不同工况下的正确通行,为无人驾驶车辆在城镇道路环境路口行驶和通行提供了一种完整策略和系统[1-2]。
1 系统架构
系统架构如图1 所示:
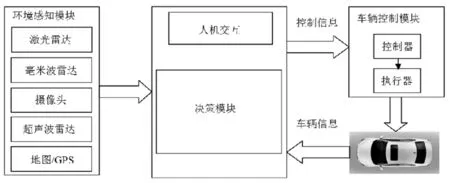
图1 系统架构图
其中决策模块是无人驾驶的核心模块,它从环境感知模块中提取相关信息,将其抽象成为离散事件集合,并将无人车结构化道路环境下的常规行为动作序列划分为不同的行为状态,通过对当前驾驶环境的理解,在行车安全标准、行车效率标准和交通法规的约束下,将规划结果分解为一个合理的驾驶行为状态系列。与车辆控制模块采用交互式通讯结构,将符号形式的推理结果转化为目标点、候选点集合,发送至车辆控制模块、最终控制车辆按规划的结果实现无人驾驶车辆在各个特定路口不同工况下的正确通行[3-4]。
(1)总状态迁移图如图2 所示:
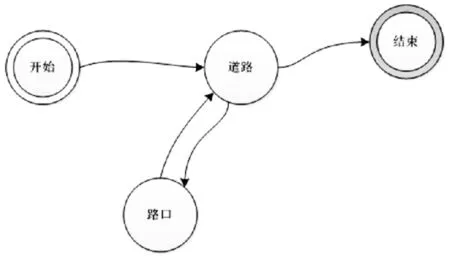
图2 总状态迁移图
(2)路口行驶状态迁移图如图3 所示:
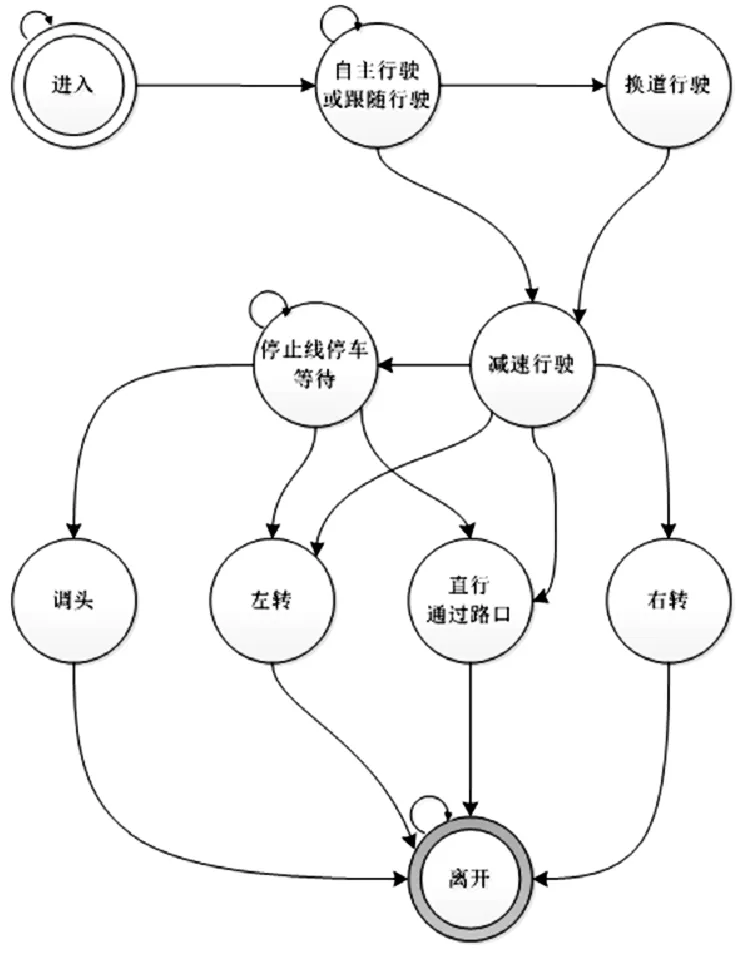
图3 路口行驶状态迁移图
路口状态迁移规则表见表1:
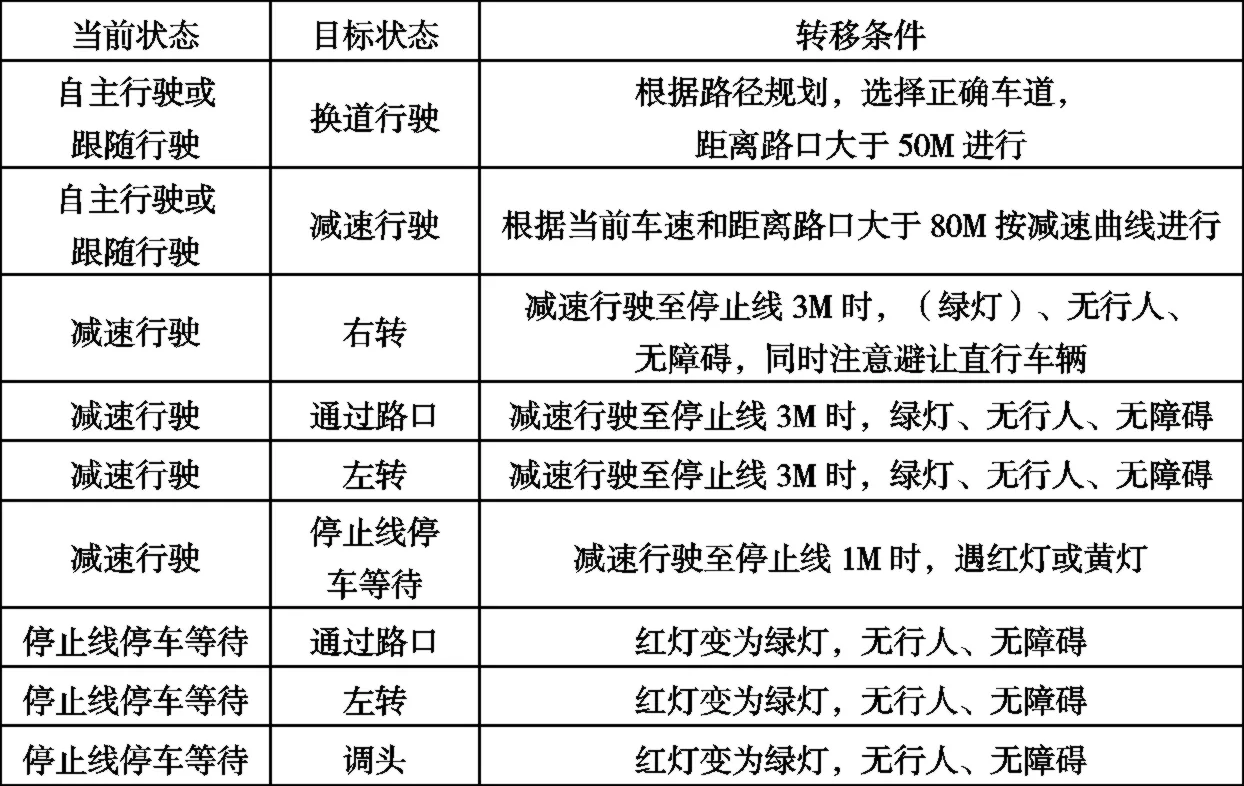
表1 路口状态迁移表
2 行驶策略
无人驾驶车辆在城区结构化道路路口行驶时,结合交通规则等,我们制定以下几种行驶策略。
(1)自主行驶
在结构化道路条件下,除了执行转弯、超车、避障等动作外,无人驾驶车辆应该跟随路点行驶,不能离开车道,并应该保持在车道内行驶。
(2)跟随行驶
在结构化道路条件下,通过跟车距离安全阈值的计算可以提高车辆城区道路行驶的安全性,所以行为决策模块考虑对跟随行驶行为进行描述是十分有意义的。在一定的速度调整范围内跟随行驶也可视为加速状态与减速状态的集合。
(3)换道行驶
包括左换道和右换道。在发现前方有障碍物和前方车辆的车速明显低于道路要求车速时且道路无拥堵的情况下,无人驾驶车辆可以执行换道行驶操作。在换道行驶之前,智能车辆需检测交通状况,而且要求大于换道最小安全距离才能改变车道,进行换道行驶行为。另外根据导向箭头汇入目标车道等行为都可视为换道行驶行为的拓展。
(4)直行
根据路径规划,直行通过路口,可以看作是自主行驶或跟随行驶的一个特例。
(5)右转
根据路径规划,在路口的右转,可以看作是换道行驶(右换道)的一个特例。
(6)左转
根据路径规划,在路口的左转,可以看作是换道行驶(左换道)的一个特例。
(7)等待
一种等待行为是停车线等待红灯;另一种情况是由于城区驾驶环境较为拥堵而造成减速到达一定阈值后的行为。
(8)调头
无人驾驶车辆应该能够在具有一定长度和宽度的区域范围内执行调头。但是,在交叉路口的安全区域或单行线车道内均不能执行调头。

图4 直行工况状态迁移图
通过上述行驶策略保证无人驾驶车辆在城区环境中安全、合理地完成一定范围的驾驶行为。另外加速行驶、减速行驶及启动、制动等,我们不作为行驶策略。只把它们看作是配合行驶策略执行的车辆动作[5]。
3 决策策略
直行工况状态迁移如图4 所示。
直行工况状态迁移规则表见表2:
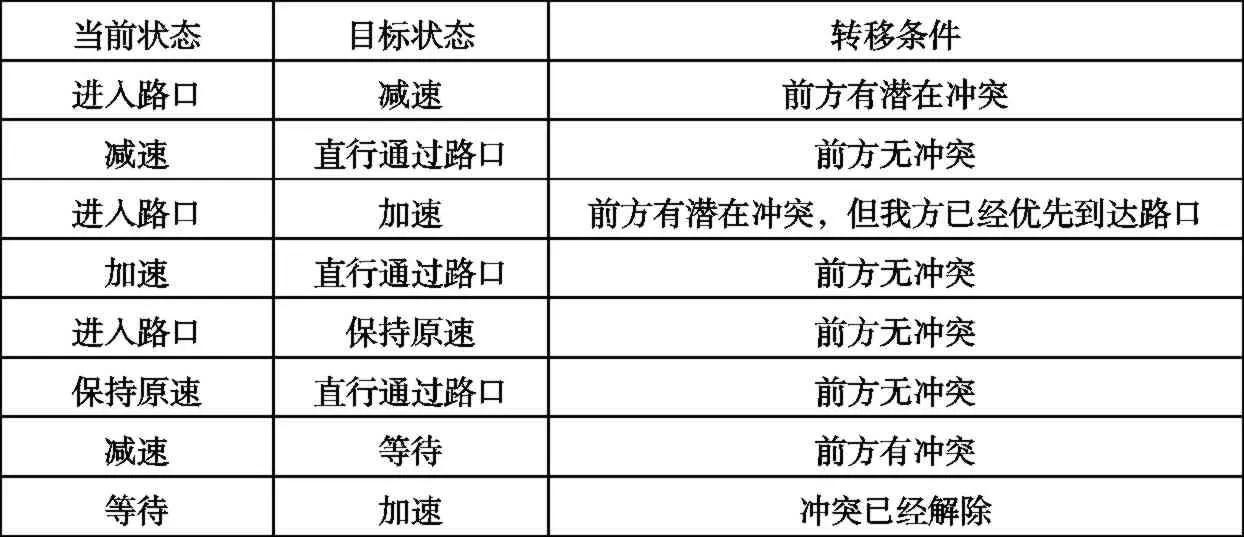
表2 直行工况状态迁移表
冲突定义:可以为行人、车辆、红(黄)灯等。
左右转工况状态迁移图如图5 所示:
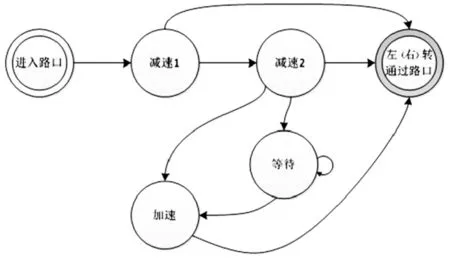
图5 左右转工况状态迁移图
左右转工况状态迁移规则表见表3:
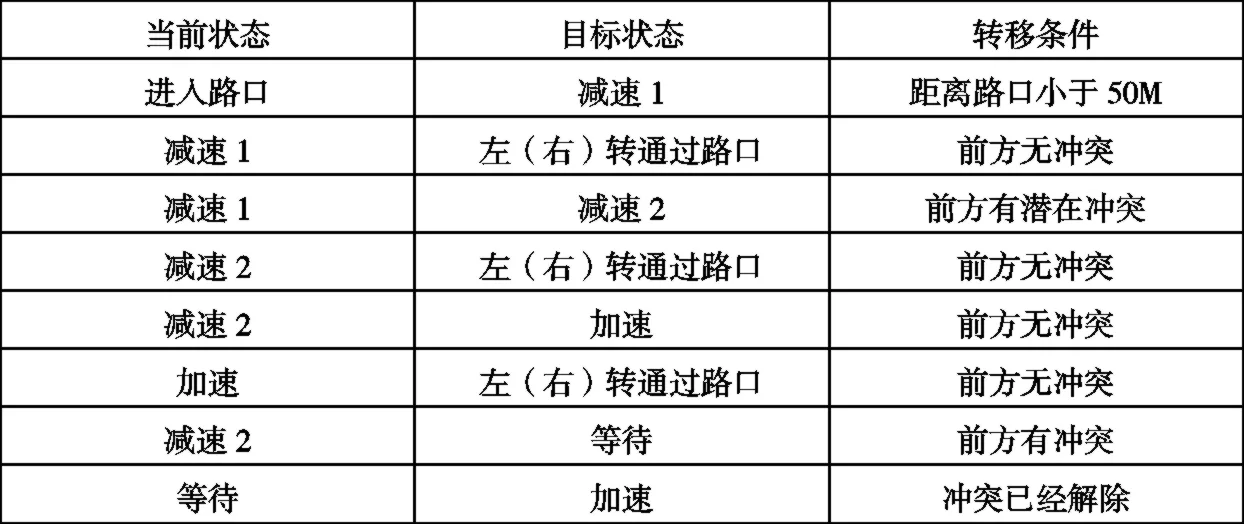
表3 左右转工况状态迁移表
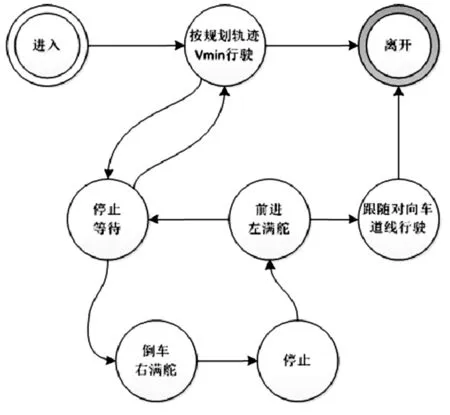
图6 调头工况状态迁移图
冲突定义:可以为行人、车辆、红(黄)灯等。
调头工况状态迁移图如图6 所示。
调头工况状态迁移规则表见表4:

表4 调头工况状态迁移表
4 总结
本无人驾驶车辆的决策策略可以像熟练的驾驶员一样产生安全、合理的驾驶行为。能够完成包括路口直行、左转、右转、停止线停车等基本行为。在城区复杂环境中,无人驾驶车辆不断从车外自然环境、交通环境、车内复杂信息空间、车体本身获取有关人、车、路及环境等多源信息,并从中提取出关键信息,并像驾驶员一样通过这些信息,思考判断、评价和输出安全、合理的驾驶行为。
