无人机在山区河流溢油事故溢油寻踪中的应用*
2019-08-13陈利琼杜博文吴东容
陈利琼,杜博文,吴东容
(1. 西南石油大学 石油与天然气工程学院,四川 成都 610500;2.中国石油天然气股份有限公司 西南管道分公司,四川 成都 610000)
0 引言
油气管道作为油气运输过程中的关键环节,已成为连接东西、南北、海外的国家骨干网络[1]。由于我国河流山川众多,跨越河流管道逐渐成为1种重要的输油管道搭建方式[2]。山区跨越河流管道发生的泄漏事故一般很难被河岸陆地人工巡线及时发现,由于山区复杂的地理环境,当此类管道发生泄漏事故后,其后果往往比普通埋地管道严重[3],跨越河流输油管道的溢油事故可能会引发火灾爆炸事故,造成巨大的经济损失和严重的生态破坏[4],而对于水域管道来讲,更会随着河水的流动使污染范围扩大,若河流溢油事故发生在跨国河流,还会造成恶劣的政治影响[5]。
为避免溢油污染以及潜在的危害,需要对泄漏油品进行回收,目前国内外对溢油回收的研究大多是对溢油回收阶段的技术研究以及溢油事故发生后的应急响应流程研究,且研究情景基本都是基于海上、海湾以及水库等流动较缓慢的泄漏情景。目前,对于长距离河流溢油事故溢油寻找方面较少研究。对于山区长距离河流,由于河岸陆地人工巡线可能无法及时监测到跨越河流输油管道的溢油事故,且山区管道所处地区地理环境复杂,并非所有的河流两岸公路都能直接看到河面,故当溢油事故被发现时,已经泄漏的油品可能随着河流已漂移到很远的位置,而且在现有的技术条件下很难观测寻找到溢油的实际位置,这2种因素增加了溢油回收的难度[6]。
溢油油头是距离泄漏点位置最远的泄漏油品。因此,对溢油油头的寻踪是增加溢油回收效率的重要手段。原油泄漏至水面之后,受水流和风的影响,会迅速扩散成一层油膜[7],对于长距离河流而言,往往通过数值模拟的方法来确定溢油可能到达的区域。原油溢油事故发生后,根据数值模拟的结果确定溢油可能漂移到的区域,在此区域只要观测到油膜,则可根据油膜性质推断油品在水面的分布情况,从而确定溢油油头的确切位置。
由于山区管道所处地区地理环境复杂,依靠人工巡线并不能保证找到油头,因此需要借助先进的技术手段来尽快找到溢油油头的位置,利用航空技术则是比较可行的方法之一。理论上说,直升飞机是寻找溢油最快速准确的方法,但我国管道公司尚未配备专门的巡线直升机,租借直升机手续繁杂[8],时间必然会因此延误,且其起飞和降落条件要求高,并非所有的情况下都能正常飞行,而用小型无人机替代直升飞机巡航河流溢油则可以避免这些不良条件的制约。
1 基于无人机油头寻踪的山区管道原油溢油应急响应流程
1.1 无人机寻油的可能性
无人机(Unmanned Aerial Vehicle, UAV)是1种由动力驱动、机上无人驾驶、依靠空气提供升力、可重复使用航空器的简称[9]。从20世纪20年代到21世纪初期,无人机先后经过了无人靶机、控制无人侦察机和电子无人机、指令遥控无人侦察机和复合控制多用途无人机的发展,技术日趋成熟。20 世纪末,以美国全球鹰为代表的长航时高空无人侦察机的实际使用发起了无人机研究的热潮[10],进入21世纪以后,无人机逐步进入民用领域并形成产业[11-12]。中国无人机的产业发展起步晚,在技术水平等各个方面跟发达国家相比有明显差距,但发展迅速。20世纪90年代,中国测绘科学研究院开始民用无人机的研制,较早应用于测绘领域[13]。自“十一五”计划实施以来,基于中国无人机遥感的技术突破,中国的无人机工业才进入了飞速发展的阶段[14]。其产业在我国军事应用、国土安全上实现重大突破,在国防、地理与海洋监测、国土测绘与海洋岛礁测绘上引发巨大应用效益。在民生安全、社会发展上也带来技术变革,在地质灾害监测、应急救援及各行业普及层面具备不可替代的作用[15]。
由此可见,目前的无人机技术已具备为河流原油溢油事故提供理论数据的可能性,利用无人机对跨越河流输油管道原油溢油事故进行溢油寻踪是提高收油工作效率,降低溢油危害的重要途径。
1.2 无人机路径设计方案
无人机的使用让山区输油管道溢油事故回收工作的效率得到极大提升,但是对于长距离河流,由于巡线无法及时检测到溢油事故的发生,故当溢油事故被发现时,已经泄漏的油品可能随着河流已漂移到很远的位置,无人机由于自身续航能力限制无法对整条河流进行寻踪。故对于山区管道溢油事故,采取“软件模拟 + 无人机寻踪”并行的模式,首先通过软件模拟出长距离河流溢油事故发生后溢油可能到达的区域范围,再派遣无人机寻踪队,在预测的范围内进行油头寻踪。
河岸陆地巡线发现山区管道发生溢油事故后报告控制指挥中心,派出无人机先遣队前往经软件模拟的溢油可能到达的区域范围,根据油头到达情况进行无人机放飞,通过无人机上搭载的高清摄像头对溢油区域进行识别拍摄,进行溢油量计算。最后根据溢油量对溢油事故情况进行判断,并且对回收物资机具进行准备,最后进行拦截收油。图1为基于无人机油头寻踪的山区管道溢油应急响应流程。
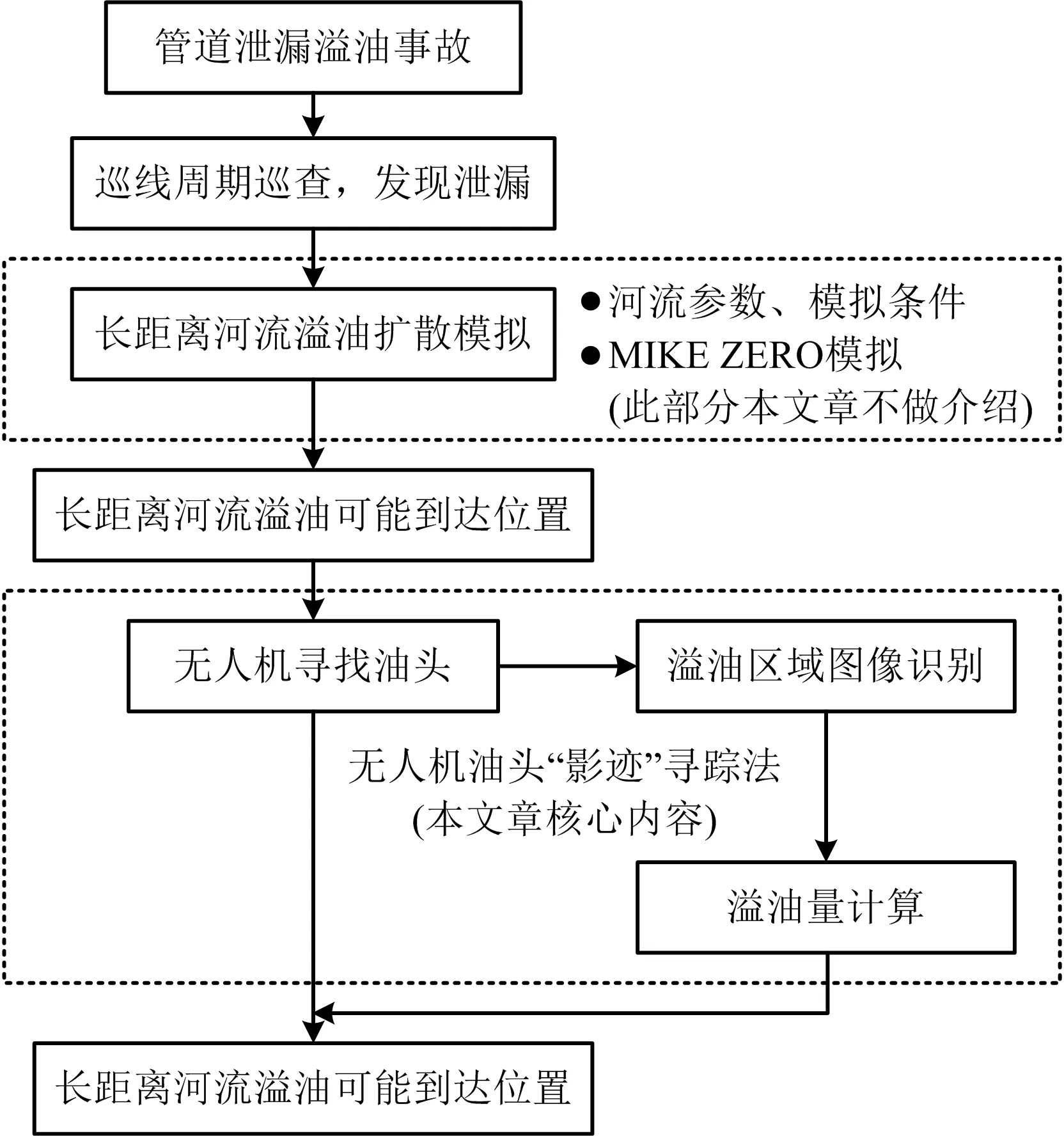
图1 基于无人机油头寻踪的山区管道溢油应急响应流程Fig.1 Flow chart of emergency response for oil spill accident of pipeline in mountain area based on UVA for oil head pursuit
2 无人机溢油油头“影迹”寻踪
无人机溢油油头“影迹”寻踪法是利用无人机上装载的高清晰摄像头拍摄到的河面视频或图片,根据图片上浮油的形态和痕迹分析溢油在河面的分布情况。
受河道变化的影响,溢油随河水流动一定时间后,在河面的分布就不均匀了。如果假定在发现漏油前的泄漏是持续的,则理论上讲,越靠近泄漏点处厚度越大,而距离越远则厚度越薄。因此,油头的油膜厚度是比较薄的,较大的油膜厚度处一定不是油头。如果无人机发现了油头厚度较薄处,则其顺着溢油流动方向的下游不远处应该就是油头了。
因此,油头位置判据为:其上游方向厚度较大,而下游方向基本无油渍的油膜厚度稀薄处,即为油头。另一方面,还可以根据这些关系分析油品特征,划分溢油区域,据此计算油区面积和漏油量。
2.1 无人机路径设计方案
跨越河流管道溢油事故发生后,抢险人员携带无人机到达油头观测点。到达观测点后,如果不能凭肉眼发现油头,则需要采用无人机进行油头寻踪。
根据油头是否到达观测点,可能会遇到以下2种情况:
1)到达预测油头位置处(观测点),未发现油头或油膜。在持续泄漏的情况下,首先向上游方向在5 km范围内放飞无人机(一般无人机的续航里程为10 km),若发现油头则返回,同时根据无人机识别到的溢油图像计算溢油量,根据溢油量和溢油情况进行收油装置设备的准备。如果没发现油头,则说明油头还在上游5 km开外,应赶往上游另一预测油头位置重新进行搜索,如图2所示。
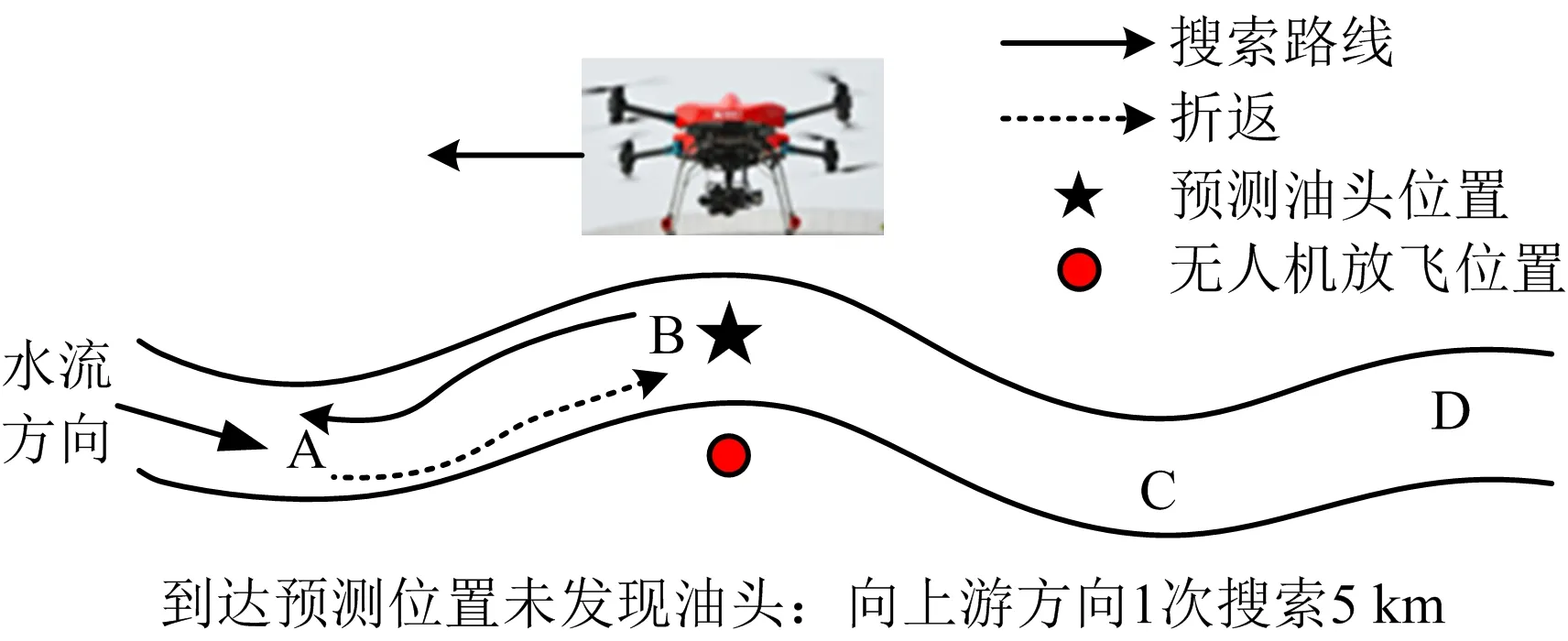
图2 未发现油头时无人机寻踪路线Fig.2 Pursuit path of UAV when oil head was not found
2)到达预测油头位置处(观测点),若发现油膜或油渍,则不管什么情况下,都只需向下游方向放飞无人机。首先向下游方向,在5 km范围内放飞无人机,若发现油头则返回,同时根据无人机识别到的溢油图像计算溢油量,根据溢油量和溢油情况进行收油装置的准备;如果没有发现油头,则到离预测位置下游10 km附近合适位置,如果在该位置没发现油头,则可以向上游5 km范围内放飞无人机(类似第1种情况),同时在该处附近合适位置设置拦油(布设拦油设施时间和油流5~10 km时间都在0.5~1 h);如果在该位置发现油渍或油膜,则再次向下游在5 km范围内放飞无人机,以此类推,通过多次搜索,直到发现油头,如图3所示。
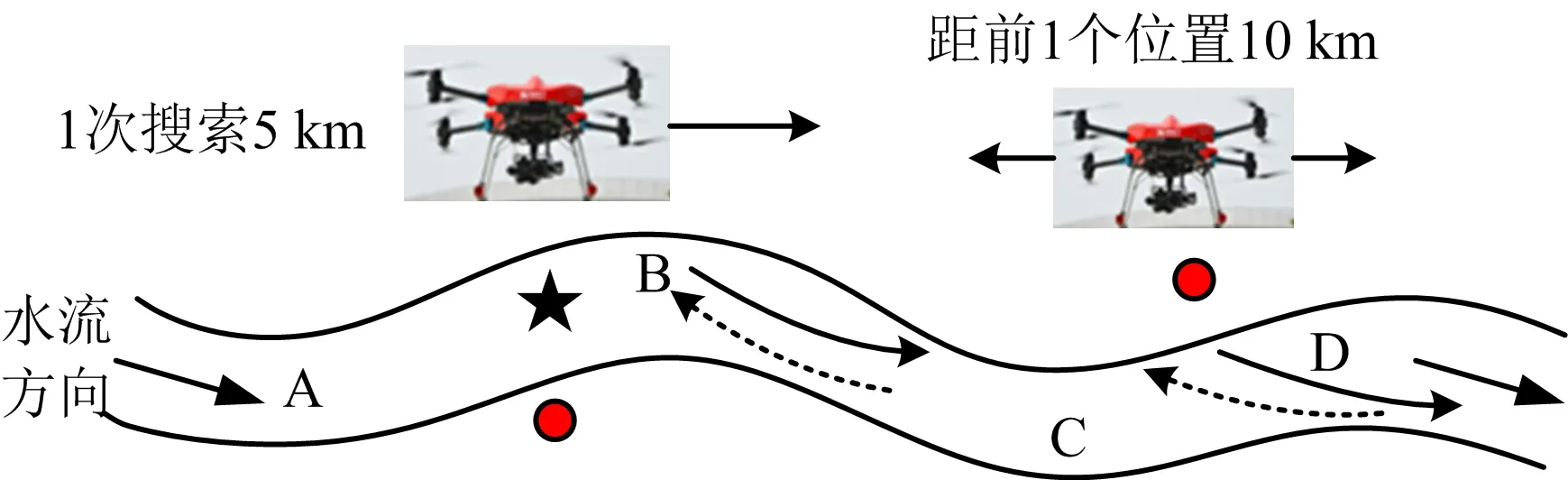
图3 发现油头时无人机寻踪路线Fig.3 Pursuit path of UAV when oil head was found
综合以上2种情况,当跨越河流管道发生溢油事故后,观测人员在合适的观测拦截点对无人机进行放飞,通过无人机上的高清摄像头对溢油油头进行追踪,并对溢油油头区域进行图像识别,从而提高下一步收油工作的效率。
2.2 无人机的路径规划算法
定义管道下游为正方向,无人机第1次搜索距离为L。控制无人机路径的代码如下所示:
double L, move, i ;
bool flag ;
do
{
i = 1;
L = 1000;
move = 0;
move += L// 无人机移动命令
WriteLine("plz input ur flag(1 or 0)");//1:发现漏油;0:为发现漏油
if (flag = false)
L *= 2;
move -= L;
++i;
L *= i;
}
while (flag = true );
WriteLine($"the place of oil is{move}")//gps为无人机的坐标。
3 无人机溢油图像识别
3.1 图像识别
由于油品在水面并非均匀分布,因此,可以根据油的种类和油膜颜色大致推断油品的分布情况。实验表明,一般来讲,油品在水面的颜色与厚度有如图4与表1所示的关系。
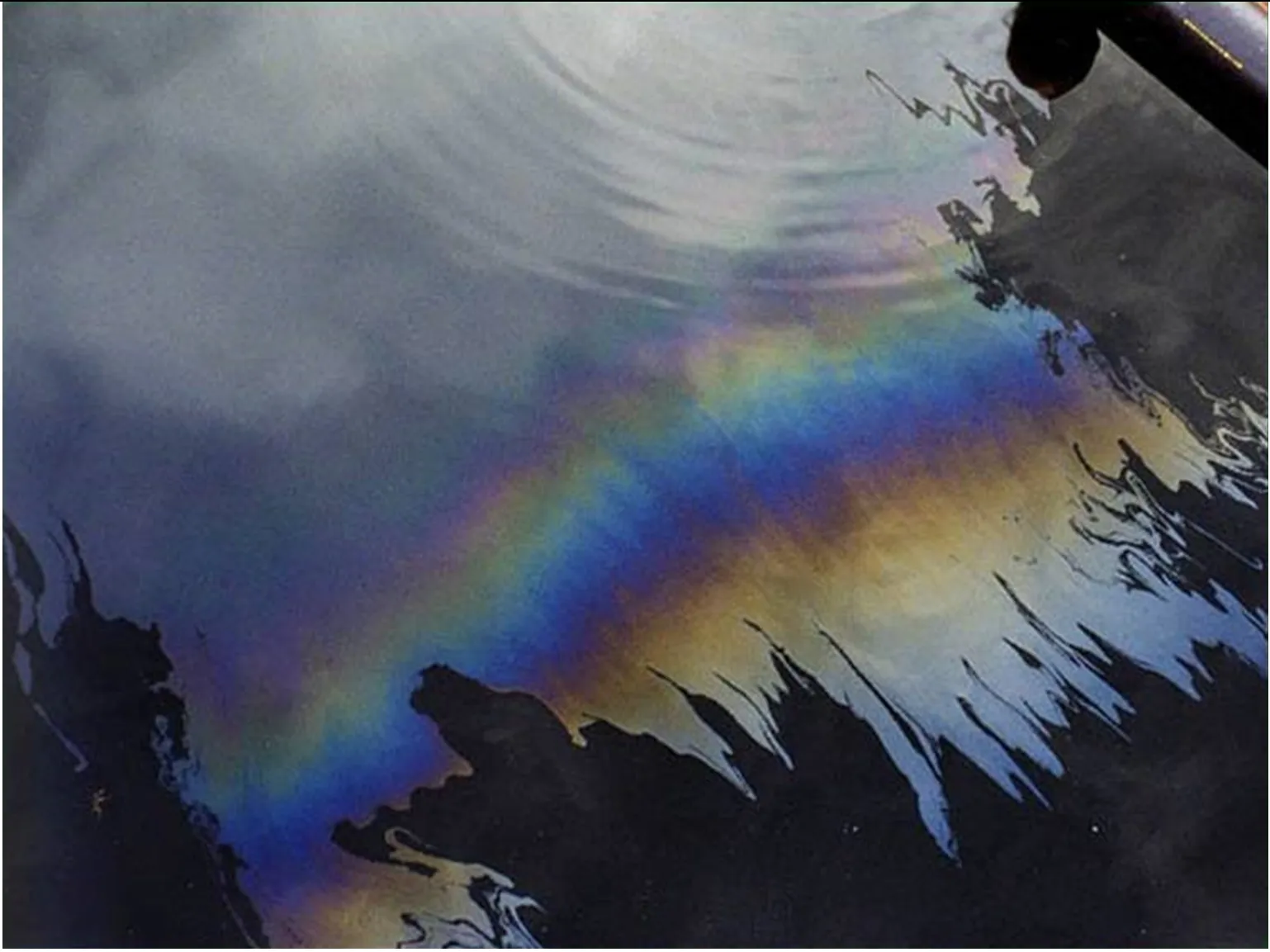
图4 不同性质油膜的反射光效果Fig.4 Reflected light effect of oil films with different properties
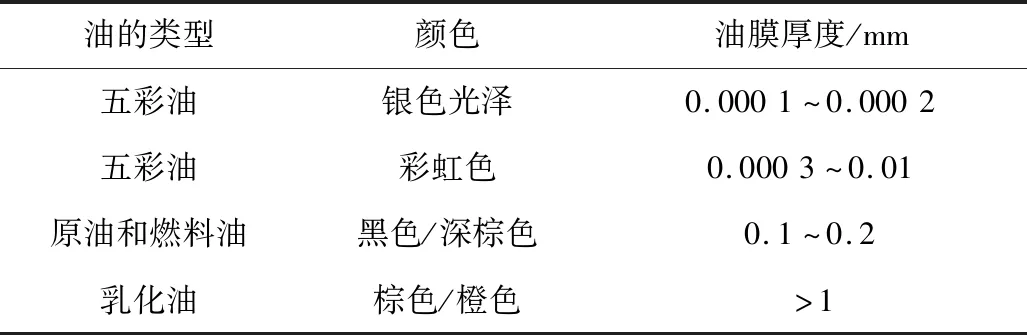
油的类型颜色油膜厚度/mm五彩油银色光泽0.0001~0.0002五彩油彩虹色0.0003~0.01原油和燃料油黑色/深棕色0.1~0.2乳化油棕色/橙色>1
无人机上的高清摄像头在拍照时,可以纪录当时的GPS坐标,还有飞行高度,焦距以及图片分辨率。根据这些参数,建立模型计算漏油区域的大小,便于设置拦油方案。其中,图5为无人机对溢油区域图像的识别流程,图6为无人机航拍下的溢油区域示例。
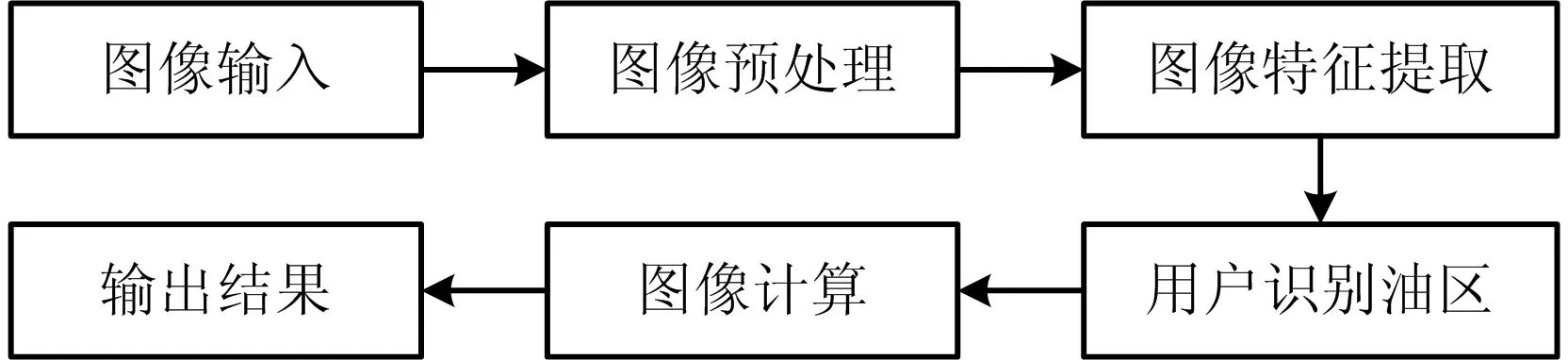
图5 无人机图像识别流程Fig.5 Flow chart of UAV image recognition

图6 无人机航拍下的溢油区域Fig.6 Oil spill area based on aerial photography of UAV
3.2 溢油范围以及泄漏量计算
对低空无人机航摄系统而言,如果影像传感器( 即数码相机) 一定,选用的摄影镜头一定,则影像地面分辨率与航高的关系为:当航高较高时,影像的地面分辨率较低; 反之,当航高较低时,影像的地面分辨率相对较高。其关系为[16]:
式中:H为摄影航高, m;f为摄影镜头焦距, mm;GSD为地面分辨率, m;a为像元尺寸, mm。
计算出摄影高度后,则可以根据相应的比例尺和几何关系,计算出油层的边界尺寸,从而计算出溢油面积;再结合油膜厚度,计算出溢油量,判断溢油情况,从而确定溢油拦截方案,图7为溢油量计算流程。
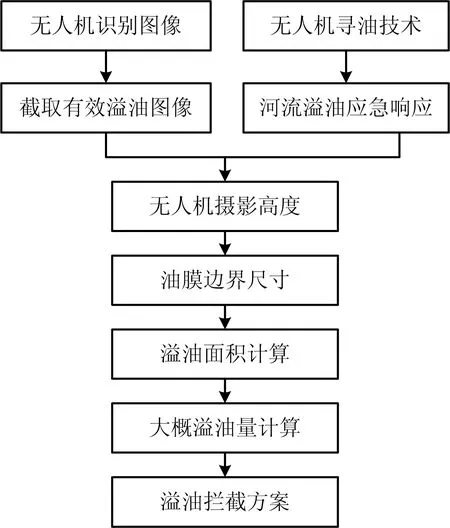
图7 基于无人机图像识别的溢油量计算流程Fig.7 Flow chart of calculation on amount of spilled oil based on image recognition of UAV
4 应用实例
某跨越河流管道发生溢油事故,由于陆地人工巡线未能及时发现该情况,溢油已随着河流漂移到河流下游,图8为河流地形图与根据长距离河流溢油数值模拟的预设拦截点位置。此时启动河流溢油事故应急预案,在油头可能到达的位置进行无人机放飞。

图8 事件中河流地形图与预设拦截点位置Fig.8 Topographic map of rivers and preset interception points in the event
当无人机观测队到第1预设拦截位置处,未发现油头或油膜。向上游方向在5 km范围内放飞无人机(一般无人机的续航里程为10 km),途中无人机观测到了溢油油头,并对溢油部分进行图像识别,如图9所示。
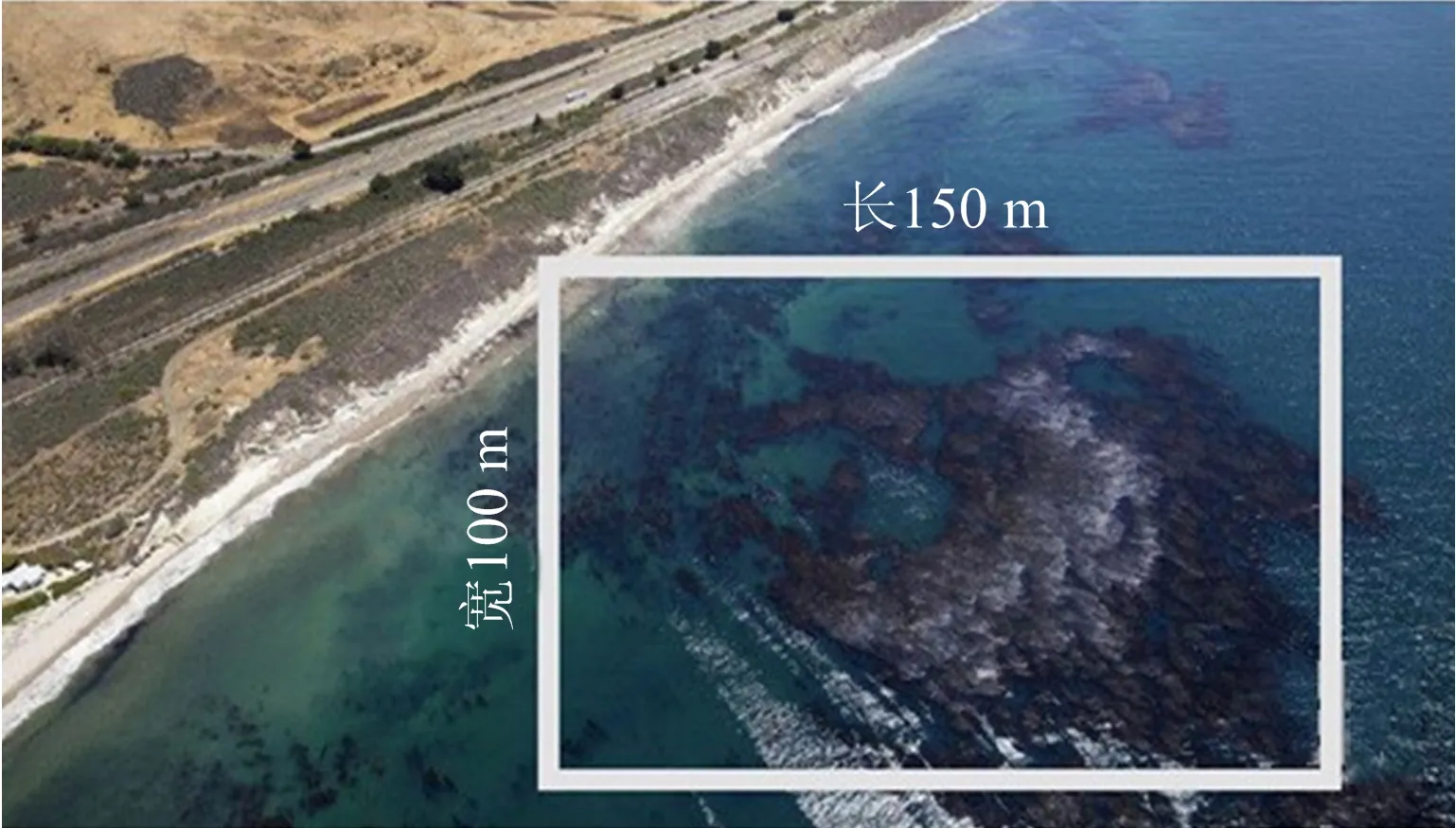
图9 事件中无人机识别的溢油区域Fig.9 Oil spill area recognized by UAV in event
通过图像识别,看出溢油油膜的颜色为黑色,其厚度最厚为0.2 mm。将摄像头参数以及分辨率数值带入航高公式,计算出无人机航高H为187.5 m。通过摄像航高的计算,利用三角形的边角关系,如图10所示,其中A-A′面为水面溢油长度,θ为摄像头鸟瞰状态下的拍摄角度(半角),本次运用的摄像头θ取22°,由几何关系可计算出溢油边界尺寸为长150 m,同理可得宽100 m。
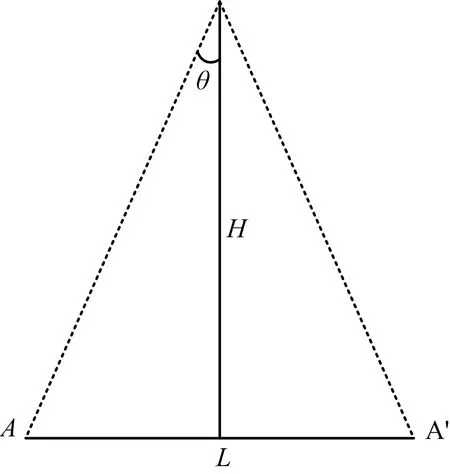
图10 溢油长度和航高的三角关系Fig.10 Triangular relationship between oil spill length and flight altitude
最后则进行溢油量计算,计算出溢油油头体积约为3.02 m3,可以在第1拦截点准备好适合于回收该体积溢油的回收方法以及回收机具设备,以等待溢油的到来从而对溢油进行回收处理工作。
5 结论
1)利用无人机溢油油头“影迹”寻踪法,通过无人机上装载的高清晰摄像头拍摄到的河面溢油区域图片,分析溢油油头位置,对溢油量进行大致计算并了解溢油情况。
2)为即将到来的溢油回收环节提供溢油量等理论数据,无人机识别的图像能够对溢油情况有一个大致了解。溢油情况的获知能够让溢油回收队更好地对回收机具和设备进行准备,提高收油效率。
