架空地线巡检机器人多电机同步控制策略
2019-08-13沈百强乐全明郑月忠倪宏宇林祖荣
沈百强,乐全明,郑月忠,倪宏宇,林祖荣,陈 斌
(国网浙江省电力有限公司绍兴供电公司,浙江 绍兴 312000)
0 引言
架空地线(以下简称“地线”)巡检机器人是在恶劣环境下代替人去进行巡检作业的工具,是电力系统线路巡检的一种实用且不可缺少的方式。但由于架空线路的复杂性及地形的影响,这些不确定的干扰对于以运动控制为核心的机器人运动体而言,会影响多个行进电机间的同步,严重时可能导致电机堵转从而发生故障,多电机的协调控制一直都是一个非常重要的研究课题。 在实际的应用中,多电机的同步性会因为负载的扰动、外界的干扰等影响而恶化,提高多电机系统的同步性能将直接影响系统的可靠性和控制精度,所以对于多电机的同步控制的研究非常具有实用价值[1]。 目前,电力系统中地线巡检机器人的运行就需要对于多电机进行同步控制才能够满足机器人的运动需求。 当巡线机器人在运行的时候,由于受到外界因素的干扰,巡线机器人3 台电机的运行速度会发生变化,从而使得机器人的运行可能出现打滑或线路严重磨损的问题。 本文针对巡线机器人在运行时电机速度不匹配的问题,提出了一种基于神经网络的多电机同步控制策略。
多电机同步控制通常有耦合控制和非耦合控制这2 种控制结构[2],非耦合控制的控制精度低,彼此之间没有耦合,受到扰动时存在较大的同步误差[3],很难满足非线性系统的控制要求;而耦合控制能够更好地改善电机控制的同步性能[4],偏差耦合控制在3 台以上的同步电机控制中有着广泛的应用[5],能够有效降低外部扰动和参数变化所带来的影响[6]。 多电机控制系统是一个非线性的系统,存在参数时变等特点,传统的PID 控制策略结构简单,易于调节,在电机调速中有着广泛的应用[7]。 但这种方法依赖于精确的模型,存在一定的局限性[8]。 模糊PID 控制方法虽然不需要建立具体的模型,但是其中参数的设计只能依靠经验进行选择,很难自动设计和调整[9]。 而神经网路PID 控制与模糊PID 控制相同,无需具体的被控对象模型,同时具有很好的自学习以及自适应的能力,能够很好地满足多电机控制的需求[10]。
本文基于地线巡检机器人的多电机控制,提出一种将RBF(径向基函数)神经网络和偏差耦合相结合的多电机控制策略,利用神经网络具有良好的自适应、自学习能力和不依赖于被控对象精确模型的特点。 通过MATLAB 仿真实验,并将这种控制方法运用于地线巡检机器人当中,结果表明,电机的转速跟踪性能良好,控制精度高,对于外界扰动的响应速度快、稳定性好,能够较好地满足地线巡检机器人多电机同步控制的需求。
1 多电机同步控制整体结构
本文的地线巡检机器人如图1 所示。 其多电机控制主要使用偏差耦合控制,控制器采用RBF-PID 控制器。 电机控制系统总体控制框图如图2 所示。 图中w1(t),w2(t),w3(t)表示的是电机的实际转速;e1(t),e2(t),e3(t)分别表示电机1,电机2,电机3 的跟踪误差(即电机给定转速与实际转速的差值);δ12(t),δ13(t),δ21(t),δ23(t),δ31(t),δ32(t)则表示的是电机的同步误差(即不同的电机之间实际转速的差值)。 整体的控制过程如下,给定电机一定的转速,电机给定的转速与实际的转速之偏差,作为电机的速度控制信号。再将电机的实际转速与其他电机的实际转速之偏差,作为电机的速度补偿信号[11]。 将得到的信号,分别给到RBF-PID 控制器和速度补偿器,补偿电机的速度,控制电机之间的同步运行,达到多电机同步控制的目的。

图1 地线巡检机器人
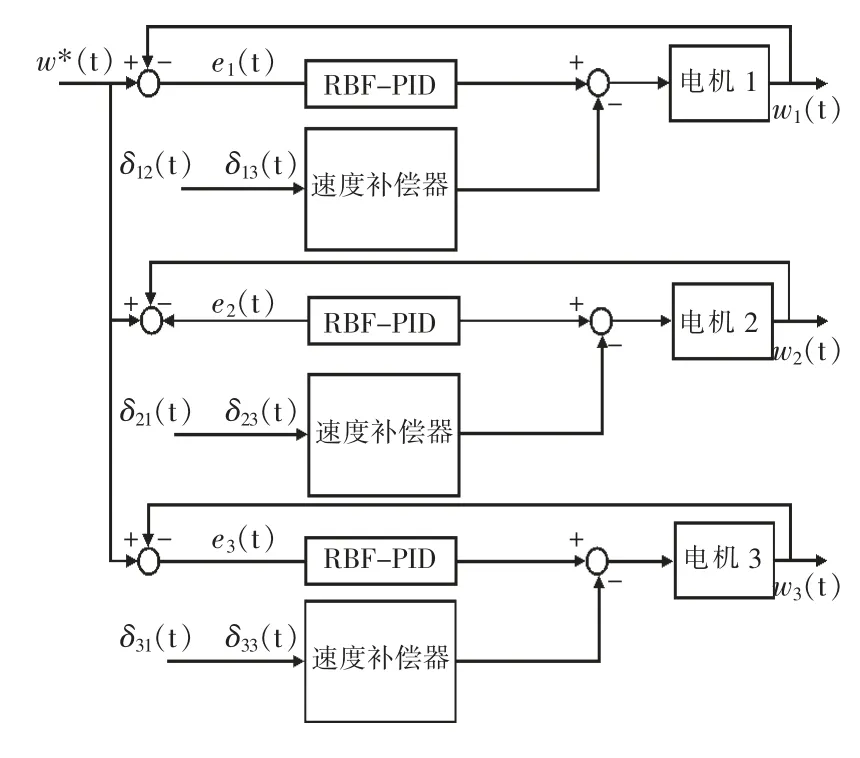
图2 RBF 控制结构
相比其他的控制方式,如传统的PID 控制、模糊PID 控制等,传统的PID 控制对于非线性系统控制很难建立一个准确的模型;虽然模糊PID控制也不依赖于控制对象的实际模型[12],但是对于模糊PID 控制器搭建的经验要求较高,存在一定的局限性。 而神经网络PID 控制方法,易于理解、操作简单,相比于其他控制方法,更加具有实用性[13]。
2 偏差耦合控制原理
偏差耦合控制利用不同电机转动惯量之间的关系,在速度控制中,添加电机的速度作为补偿信号,根据电机反馈的信号,分配不同的补偿速度,从而达到速度补偿的目的[14]。 在系统运行时,控制器将不同电机之间的速度进行比较,通过补偿算法,得到每个电机的转速补偿信号[15]。 把不同电机的转速进行补偿,最终消除电机和相邻的电机转速之间的偏差[16]。
对于一个具有n 台电机的多电机控制系统,可以定义第n 台电机的跟踪误差为:

为了保证每台电机能够同步运行,那么跟踪误差就需要满足:

同理,再定义第n 台电机与系统中其他电机的同步误差为:

式中:w1(t),w2(t),…,wn(t)分别为第1 台到第n 台电机的实际转速。
根据跟踪误差和同步误差的定义,可以知道多电机同步控制的目的就是设计一个控制器来控制转矩,使得跟踪误差e(n)t和同步误差δnn-1(t)收敛趋近于零。
对于3 台电机的多电机控制系统来说,对于电机1,满足跟踪误差和同步误差收敛,就要满足:

同理,电机2,3 满足同样的关系式,所以当进行3 台电机的同步控制时,总共需要3 个跟踪误差控制器和6 个同步误差控制器进行电机的同步控制。因此,系统中各个电机的速度控制量为:
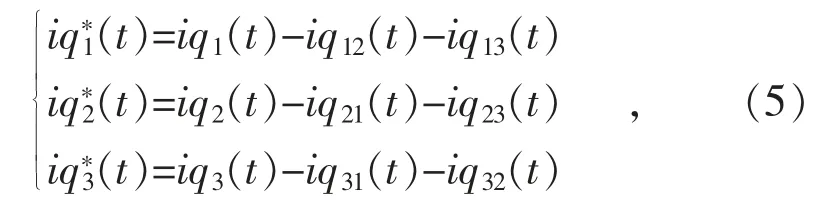
式中:iqn(t)为每台电机的跟踪误差控制器的输出;iqi1(t),…,iqin(t)为同步误差控制器的输出。
由此,偏差耦合的多电机控制方法可以归纳为以下3 步:
(1)定义控制变量e(n)t 和δnn-1(t),n=1,2,…,n,作为电机的同步误差和跟踪误差。
(2)设计RBF-PID 控制器的输出为电机自身调节输出和补偿信号输出。
(3)建立系统的整体控制模型。
3 RBF-PID 控制器设计
3.1 RBF 神经网络观测器设计
RBF 神经网络是一种前馈网络,相较于BP神经网络,RBF 神经网络具有最佳逼近的特点,对于一个连续非线性函数,能够无限逼近[17]。 RBF神经网络总共有3 层,分别为输入层、隐含层和输出层,隐含层用高斯函数作为激励函数[18]。 输入层到隐含层是非线性的映射,隐含层到输出层是线性的映射[19],其结构如图3 所示。

图3 RBF 神经网络结构
本文采用的控制系统由RBF 神经网络观测器和PID 控制器构成。 其中RBF 神经网络观测器有跟踪误差控制器与同步误差控制器2 种,具有双输入单输出的结构。 跟踪误差控制器的输入为转速误差以及实际转速,输出为q 轴调节电流。 同步误差控制器的输入为不同电机的实际转速差值和其微分值,输出为q 轴补偿电流。
在RBF 神经网络结构中网络的输入向量X=[x1,x2,…,xn]。 设RBF 网络的径向基向量为H=[h1,h2,…,hj,…,hm]T,其中hj为高斯基函数:

网络的正数输出为:

辨识的性能指标:

式中:Cj为第j 个结点的中心矢量;bj为网络的基宽向量;w 为网络的权向量[20]。
根据梯度下降法,得到节点中心、输出权值和节点基宽的迭代算法:
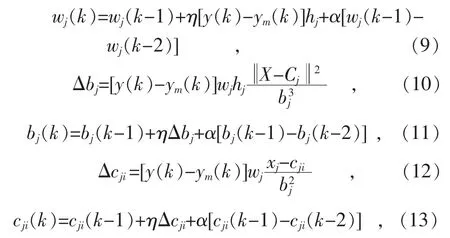
式中:η 为学习速率;α为动量因子,得到被控对象的雅可比信息的辨识算法:

3.2 基于RBF 神经网络的PID 设计
传统的PID 控制器通过选取一组最优参数,来达到最佳的控制效果。 但是由于多电机控制系统中,对象具有非线性特性,所以理想控制器也应该为非线性函数[21]。 因此,结合神经网络,设计了一种RBF-PID 型神经网络控制器,实现对控制器参数的在线调整,更好地同步控制多电机系统,RBF-PID 控制器的结构如图4 所示。 图中Δkp,ΔkI,ΔkD分别表示的是kp,kI,kD3 个PID参数的调整量。 调整量需要通过迭代法不断地进行调整,为了快速获取调整量,选用梯度下降法进行迭代。 而梯度下降法的原理是通过求解当前位置梯度,沿着梯度负方向移动,到达新的位置,然后重复着这一过程,从而使目标函数沿着函数值下降最快的方向更新参数。 这种方法能够达到快速获取调整量的目的。
增量式PID 控制算法的控制误差为:


图4 RBF-PID 控制器结构
根据增量式PID 控制器输入输出的定义得到增量式PID 的输出为:

为得到神经网络PID 控制器参数的更新规律,选取参数整定性能指标函数:

最后采用梯度下降法对类PID 神经网络参数进行调整,调整规则如式(18)和式(19)所示。
PID 参数调整:
权值参数调整:
4 试验分析
为了验证该控制策略的控制性能,本文采用MATLAB 中的Simulink 仿真平台进行仿真试验。在Simulink 中建立3 台电机的控制模型,每一台电机的独立控制部分的电流环使用传统的PID 控制,电机的速度环和速度补偿部分使用RBF-PID控制器进行控制,RBF-PID 模块使用S 函数进行编写。 试验使用的电机具体参数如表1 所示。 而RBF-PID 控制器中PID 的参数学习率xite=-0.2,权值的参数学习率xitev=-1,学习参数η=1.5,动量因子∂=0.5。
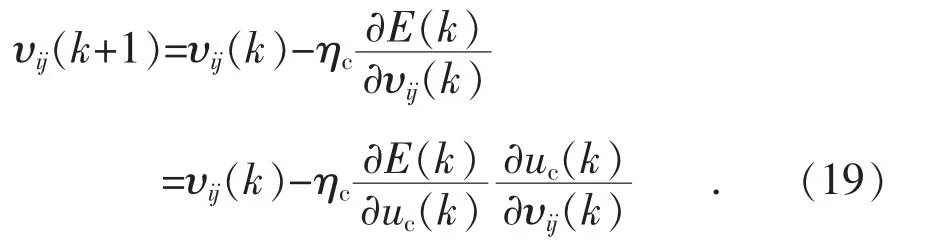
试验时,结合地线巡检机器人的实际运行情况,地线巡检机器人正常工作下的运行速度为0.2 m/s(通过电子齿轮之间的转换,即给定电机初始转速为300 rad/s),运行一段时间后,巡检机器人受到外界干扰(即在时间t=0.1 s 时给电机一个扰动),转速下降后又再次回到给定值,接着改变地线巡检机器人行进电机的给定转速为0.167 m/s(即旋转电机转速为250 rad/s)。 在Simulink 下进行这一过程的仿真,得到系统转速,同步误差以及跟踪误差曲线。

表1 电机参数
试验结果如图5—7 所示。
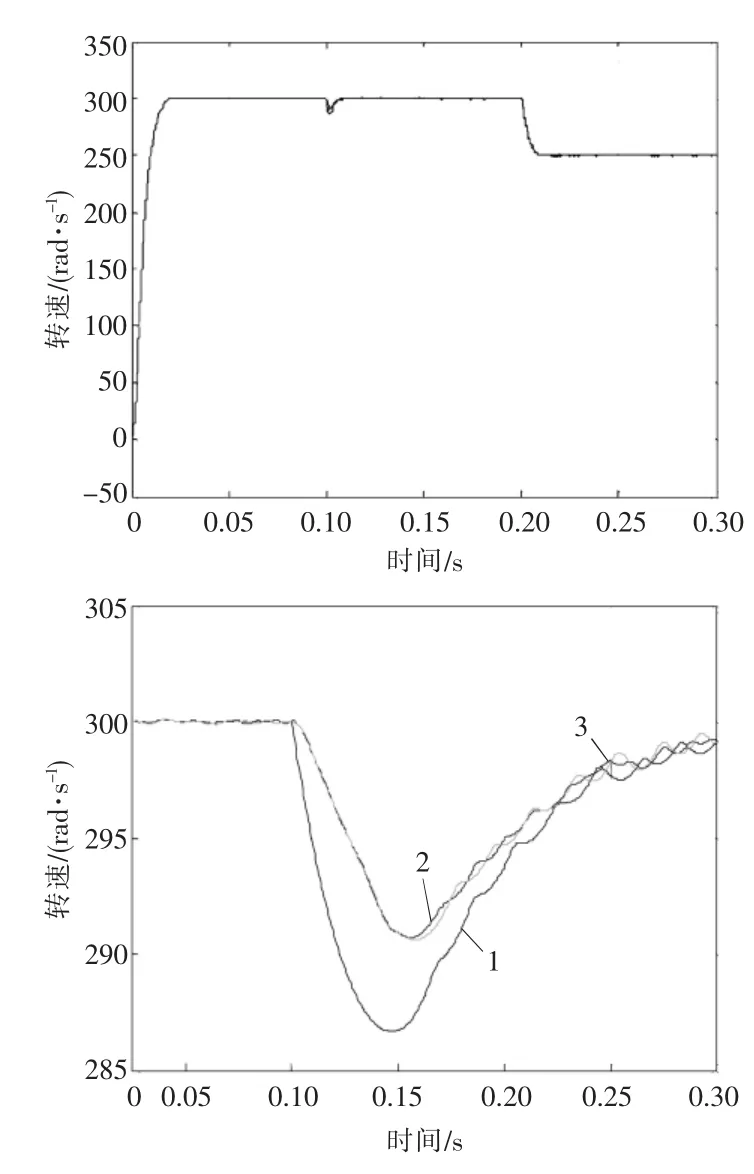
图5 电机的转速及局部放大曲线
根据图5—图7 分别得出结论,由图5 可知,3 台电机在启动的过程当中,动态响应的速度很快,能够很快地达到给定转速。 当其中的1 台电机给定负载扰动后,其他2 台电机的转速都能够进行跟随,使得电机的转速很快能够回到稳定转速。 由图6,图7 可知电机之间具有较小的跟踪误差,具有良好的同步性能和稳定性能。
图6 电机的跟踪误差及局部放大曲线
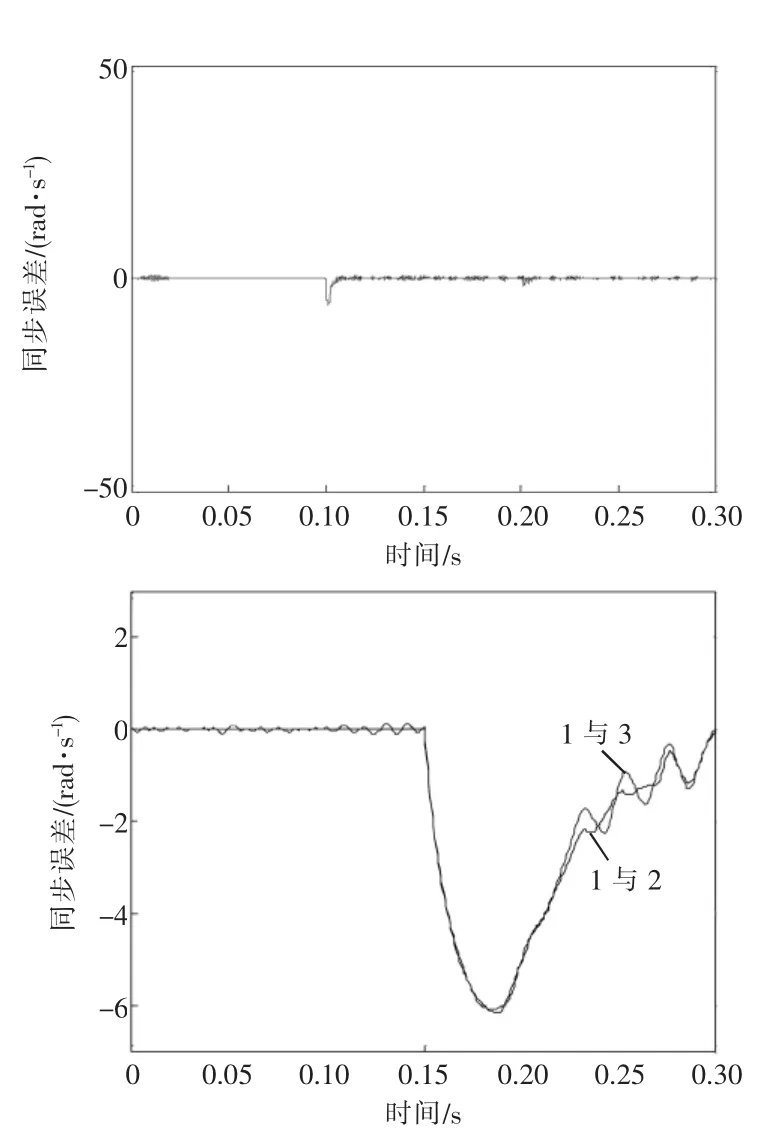
图7 电机的同步误差及局部放大曲线
多电机同步控制算法已应用于浙江电网,可实现高压架空地线单挂点、双挂点及耐张塔自主越障,多电机同步运行控制策略运行效果良好,满足项目设计需求。
5 结语
本文针对地线巡检机器人在实际运行中,存在线路复杂、地形影响以及辅助器件影响等扰动,以及其他外界因素干扰导致的各个电机之间速度不匹配,将神经网络与PID 控制相结合,设计了一种控制器,该控制器具有神经网络自学习的特点,不依赖于具体的系统模型,能够自动地对PID 控制器中的参数进行调整,各个电机之间通过偏差耦合的控制结构进行设计,最后经由Simulink 仿真平台进行仿真试验。 由电机的转速、跟踪误差、同步误差等分析可知,在本文的多电机同步控制策略下,电机的转速跟踪性能好,控制精度高,对于外界扰动的响应速度快、稳定性好,能够较好地满足地线巡检机器人多电机同步控制的需求。