基于试验测试的履带车辆行星变速机构振动特性分析
2019-08-06张强李洪武程燕张玉东
张强, 李洪武, 程燕, 张玉东
(1.中国北方车辆研究所 车辆传动重点实验室, 北京 100072; 2.北京理工大学 机械与车辆学院, 北京 100081)
0 引言
高速履带车辆要求在复杂多变的载荷中,具有灵活的机动性能,行星变速机构是实现高速履带车辆机动性的核心部件[1]。高速履带车辆的动力舱一般安装在车辆后部,动力舱由发动机和液力机械综合传动装置组成,行星变速机构安装在液力机械综合传动装置中,是液力机械综合传动装置的核心部件。行星变速机构内部通常包含3至4排行星齿轮,通过离合器和制动器的分离与结合操控不同行星齿轮,实现车辆挡位变化[2]。行星变速机构运行时的振动剧烈,降低了行星变速机构的运行精度、传递效率和使用寿命[3]。然而由于复杂的多排行星齿轮耦合作用,其内部行星齿轮啮合过程与振动的映射关系仍不清楚[4]。因此,对行星变速机构振动特性进行研究,进而实现行星齿轮的优化设计,具有重要理论意义和工程应用价值[5]。
针对行星变速机构的振动问题,国内外学者进行了大量研究,美国俄亥俄州立大学Petry-Johnson等[6]开展了大量应用于汽车、航空航天等领域的高速、大功率、变载荷齿轮的试验研究。Ottewill等[7]将编码器等设备应用于台架试验,其中采用数字信号处理器(DSP)编程实现了主动轮转矩的动态调整,并对互相啮合齿轮副的振动速度、加速度等数据进行实时采集。Botman等[8]测量了飞机齿轮箱的振动情况,试验结果表明系统在加速与减速阶段存在明显的幅值跳跃现象,与传统理论分析结果相一致。Inalpolat等[9]通过试验手段验证了考虑制造误差时系统动力学响应分析的正确性。Ericson等[10]为了测试各齿的实际振动情况,将加速度传感器直接贴于齿轮本体上,并进行了模态试验,综合分析了系统固有特性与振动响应。
国内外研究机构虽然对变速机构进行了大量研究,但研究对象主要为简单行星齿轮,对于高速履带车辆多排耦合行星变速机构,受限于试验条件和试验能力,试验分析较少。且高速履带车辆行星变速机构内部结构复杂,测量到的原始信号通常都是多个源信号的混合叠加,给内部激励的分析带来了困难。本文针对某7挡高速履带车辆用行星变速机构,建立了行星变速机构振动加速度测试系统,并对其典型挡位的振动加速度进行了测试分析,分析了典型挡位振动时域值和频域值,试验测试结果对揭示行星变速机构的振动特性,及行星变速机构内部激励与振动的映射关系具有一定的指导意义。
1 行星变速机构振动测试方案
1.1 行星变速机构关键构件运动学关系
不同挡位下行星变速机构的工作构件不同,导致各挡位行星轮系运动学关系不同。在进行行星变速机构振动测试试验前,需计算在不同挡位下行星变速机构各轮齿的运动学关系。
本文研究的某7挡高速履带车辆用行星变速机构简图如图1所示,该行星变速机构共有3个制动器(B1、B2、B3)、3个离合器(C1、C2、C3)共6个换挡元件,换挡逻辑如表1所示。表1中:第1行代表在1挡时其制动器B1、B3与离合器C1闭合,其他换挡原件分离,第2行表示在2挡时制动器B3与C1、C2闭合;○表示闭合。
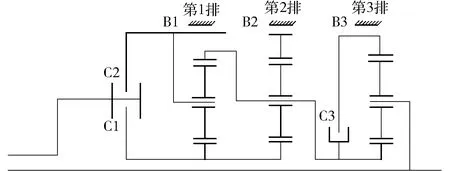
图1 行星变速机构方案简图Fig.1 Schematic diagram of planetary transmission mechanism
表1 行星变速机构换挡逻辑表
Tab.1 Shift logical table of planetary transmission mechanism

挡位制动器离合器B1B2B3C1C2C31挡○○○2挡○○○3挡○○○4挡○○○5挡○○○倒1挡○○○倒2挡○○○
表2为行星变速机构各挡位下各轮系的工作构件,如1挡时第2排、第3排行星齿轮传递动力,第1排行星齿轮不参与功率传递。在2挡工况下3排行星轮系均参与工作,在进行关键构件啮合频率计算时,其他挡位运动关系可以参照2挡工况建立。
下面以2挡工况为例进行计算关键构件啮合频率,在2挡工况下,第1排行星架输入,第3排行星架输出。根据行星轮系运动学关系分析可获得各排
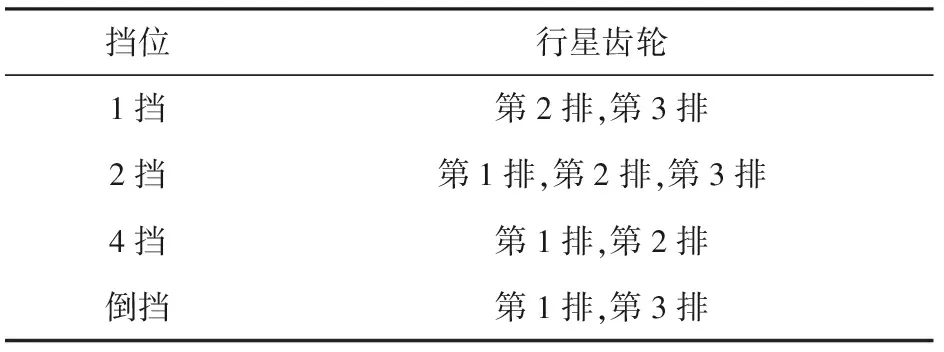
表2 各挡位下工作行星齿轮
行星架转速运动关系为
ωh1=ωo,
(1)
(2)
(3)
式中:ωo表示绕中心轴o的输入角速度;zhi表示第i排行星架中构件h的齿数,h=s, p, r,s、p、r分别表示太阳轮、行星轮和齿圈。
各排太阳轮转速运动关系为
(4)
ωs1=ωs2,
(5)
ωs3=ωh2.
(6)
各排齿圈转速运动关系为
ωr1=ωh2,
(7)
ωr2=0,
(8)
ωr3=0.
(9)
各排行星轮转速运动关系为
(10)
(11)
(12)
各排太阳轮啮合频率关系为
ωns1=(ωs1-ωh1)zs1,
(13)
ωns2=(ωs2-ωh2)zs2,
(14)
ωns3=(ωs3-ωh3)zs3,
(15)
式中:ωnsi表示第i排(i=1,2,3)太阳轮啮合频率。
各排行星轮啮合频率关系为
ωnp1=abs(ωp1-ωh1)zp1,
(16)
ωnp2=abs(ωp2-ωh2)zp2,
(17)
ωnp3=abs(ωp3-ωh3)zp3,
(18)
式中:ωnpi表示第i排(i=1,2,3)行星轮啮合频率。
根据行星变速机构的各排齿轮参数,当输入转速为2 500 r/min时,经计算各挡关键构件频率如表3~表6所示。
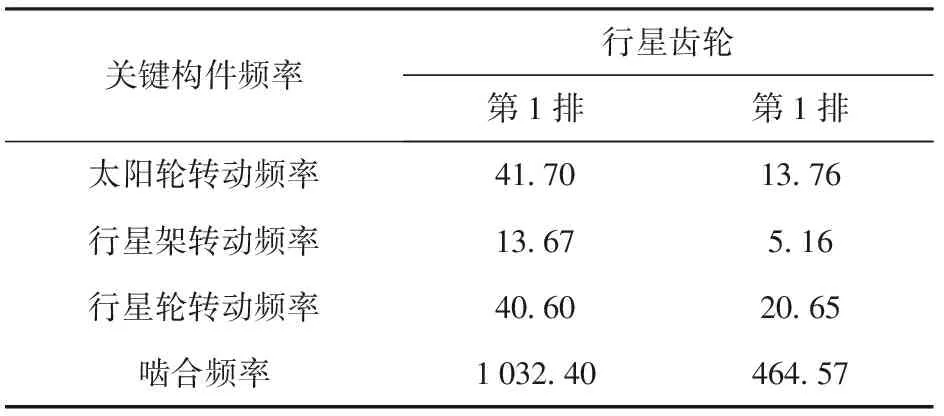
表3 1挡关键构件频率
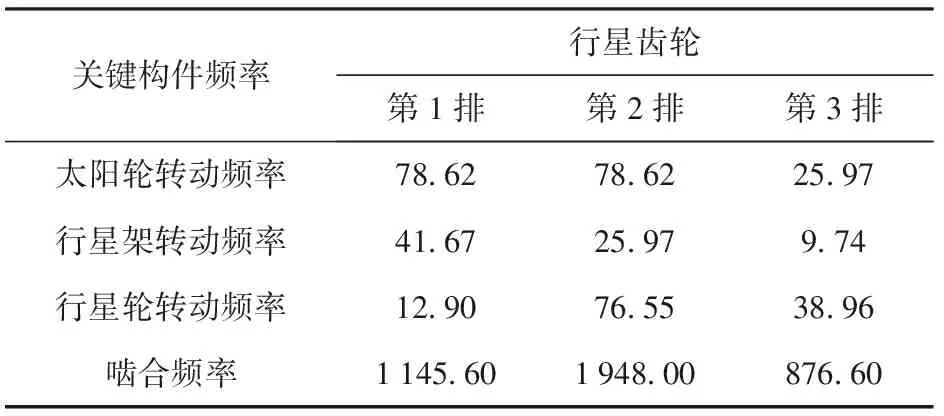
表4 2挡关键构件频率
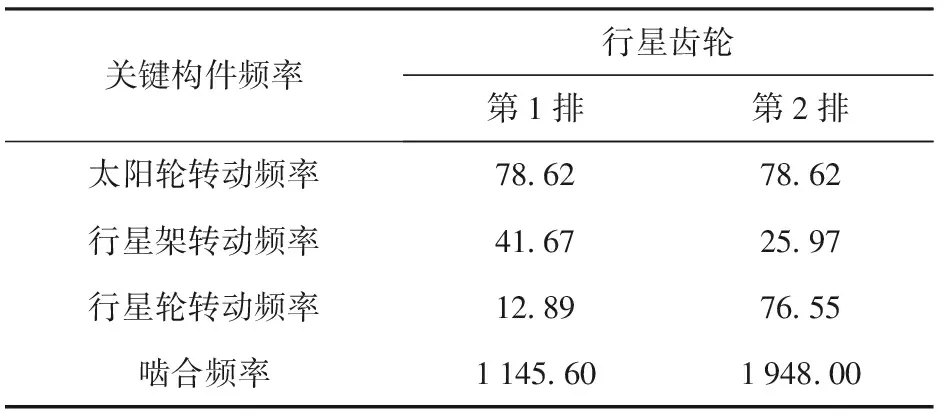
表5 4挡关键构件频率

表6 倒1挡关键构件频率
1.2 行星变速机构振动测试系统
行星变速机构振动测试系统由驱动电机、增速箱、行星变速机构包箱和加载电机构成,实现行星变速机构的驱动与加载。液压系统提供行星变速机构2.0 MPa操纵油压和不同流量的多路润滑,转矩仪、转速传感器和压力传感器分别用于转矩、转速和压力测量。振动加速度传感器布置在行星变速机构包箱上,振动数据采集系统能够实现测试点加速度采集处理,试验台架总体布置如图2所示。试验用仪器如表3所示。
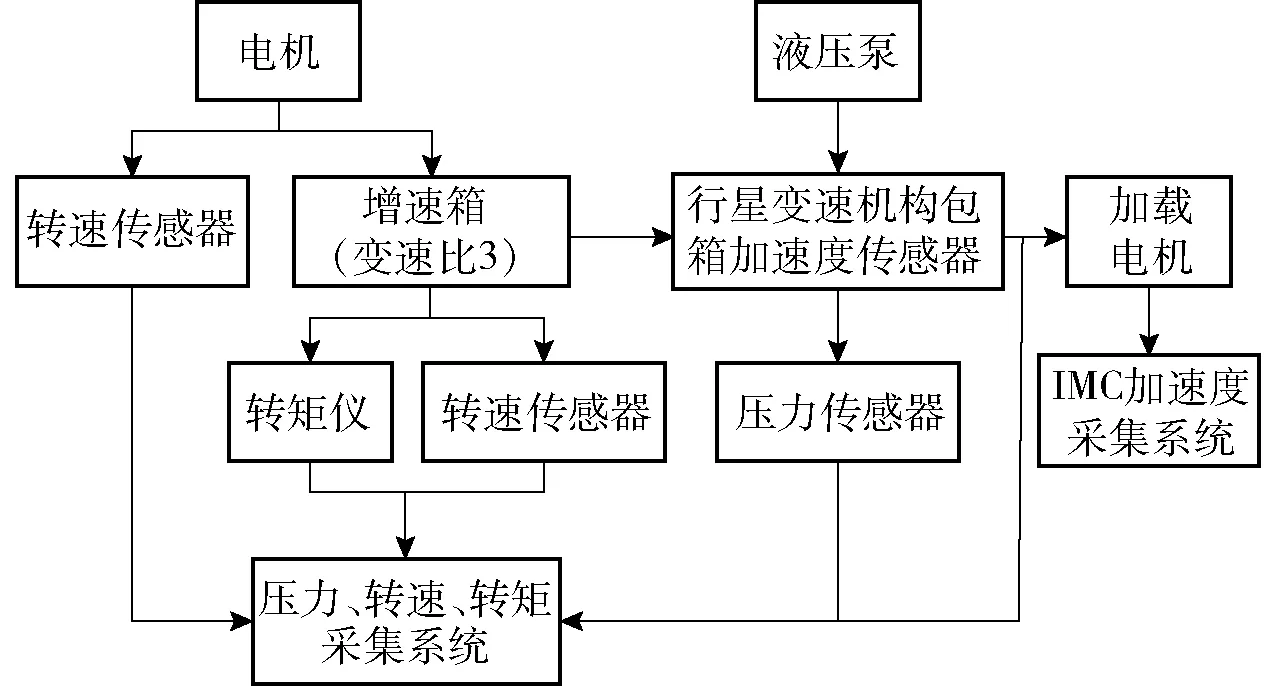
图2 振动测试台架布置图Fig.2 Arrangement of vibration test bench
表3 测试设备
Tab.3 Test equipment
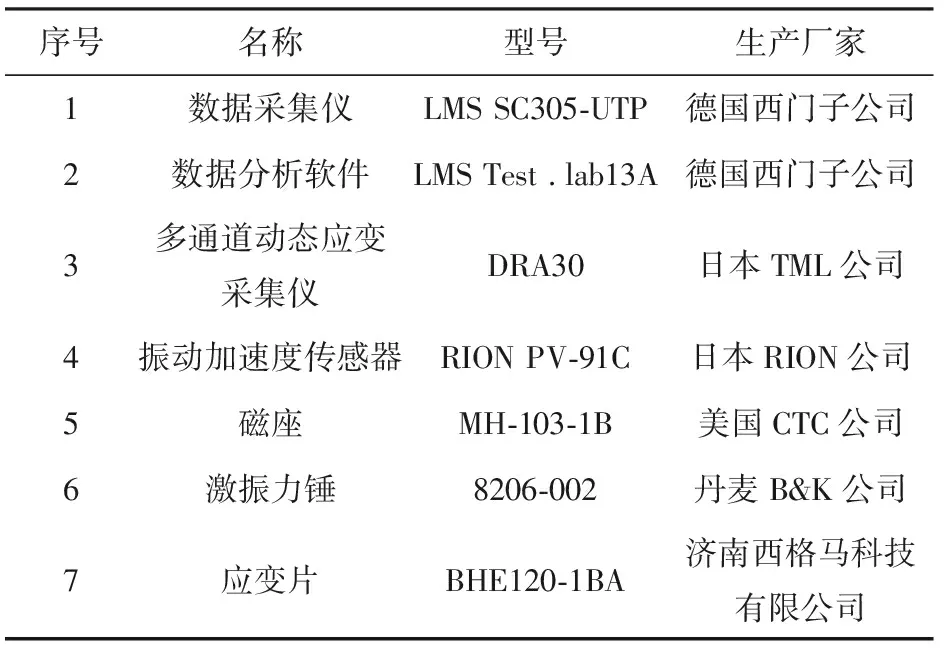
序号名称型号生产厂家1数据采集仪LMS SC305-UTP德国西门子公司2数据分析软件LMS Test .lab13A德国西门子公司3多通道动态应变采集仪DRA30日本TML公司4振动加速度传感器RION PV-91C日本RION公司5磁座MH-103-1B美国CTC公司6激振力锤8206-002丹麦B&K公司7应变片BHE120-1BA济南西格马科技有限公司
行星变速机构安装在包箱内,输入端与增速箱和驱动电机连接,输出端与加载电机连接,包箱实现变速机构的固定、密封和与其他试验功能模块的连接,振动加速度测试系统如图3所示。
1.3 测点布置
行星变速机构振动加速度测点的布置如图4所示,每个测点有3个通道,定义通道2(y轴方向)为轴向方向,通道1(x轴方向)与通道3(z轴方向)为径向方向。

图4 振动测试测点布置Fig.4 Vibration test point arrangement
测点7和测点8靠近输入端,接近第1排行星齿轮,测点1和测点2位于第1排与第2排行星齿轮之间,测点10和测点9位于第2排与第3排行星齿轮之间,测点3、测点4、测点5、测点6靠近第3排行星齿轮并接近输出端。
1.4 试验工况
输入端的转速设置为2 500 r/min,输入端转矩分别设置为空载、半载(1 425 N·m)、满载(2 850 N·m)3种载荷,选取1挡、2挡、4挡、倒1挡4种典型挡位作为测试工况。测试时,分别对不同挡位不同载荷的振动加速度数据进行采集,振动测试系统采样频率设置为10 240 Hz,频率的分辨率设置为0.25 Hz,每种工况的测试时间设置为1 min.
2 行星变速机构振动测试时域值分析
信号的时域值(振动均方根(RMS)值)反映信号的能量,是表征动态信号强弱的指标,其计算公式为
(19)
式中:N为测试点总数;Xi为测试点振动RMS值。
2.1 1挡振动RMS值分析
在1挡转速2 500 r/min时,各测点的振动RMS值如图5所示。从图5中得出测点2的z轴方向在各加载载荷下振动RMS值最大,测点2的振动RMS值波动范围为2.5~15.0g,且随着加载转矩的增大,其振动RMS值呈整体增大趋势。测点3、测点4、测点6、测点7、测点8、测点10共7个测点y轴方向的振动加速度最大,从测试值可以看出轴向振动加速度大于径向加速度,振动加速度最大值并不是沿着行星轮系旋转方向。
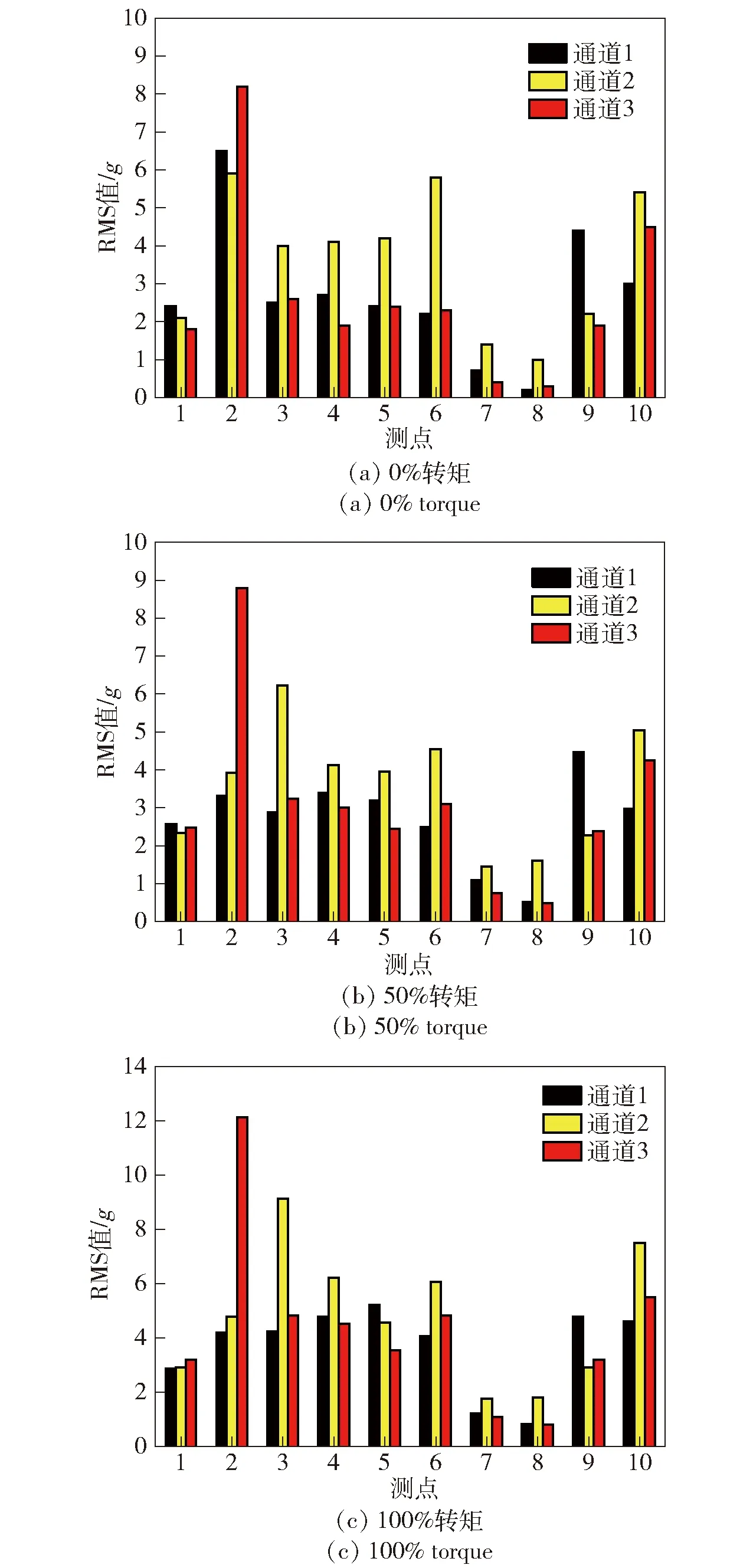
图5 1挡转速2 500 r/min时振动RMS值Fig.5 Vibration RMS value at 2 500 r/min in 1st gear
对于轴向产生较大振动的原因主要有以下3个方面:1)轴向在加载过程中有一定的窜动;2)齿轮等零部件在加工装配过程中会有一定的尺寸偏差,在大的加载下,行星齿轮会发生偏载而使得受力不均匀,对于其径向方向上由于高速旋转的离心力,降低了径向振动,而使得轴向振动较大;3)行星变速机构的振动测试需要试验包箱,试验包箱会抑制径向方向振动,导致轴向振动较大。在行星变速机构运行过程中,轴向的窜动会极大地破坏变速机构的轴承及摩擦片等零部件,加速变速机构的失效和破坏。
同时发现布置在同一圆周上的测点如测点1和测点2、测点9和测点10等,理论上结果应该相同或相近,测试结果却出现较大差异,这主要由于行星变速机构安装在试验包箱内,试验包箱按照行星变速机构实际安装的位置设计,在不同部位对行星变速机构有一定固定作用,也就抑制了某些方向上的振动,导致虽然同一圆周上的测点出现测试结果的差别。
同一圆周上不同测点结果不同,说明试验箱体和固定结构对行星变速机构的振动特性也有一定影响,在以后设计过程中,针对现在振动加速度比较大的方向,可以考虑增加支撑,提高整体结构的刚度,通过设计优化达到整个圆周上振动加速度相同,减少振动对行星变速机构运行的影响。
2.2 2挡振动RMS值分析
在2挡转速2 500 r/min时,各测点的振动RMS值如图6所示。经比较可得2挡各测点的振动RMS值要远远大于1挡,其振动RMS值在各加载载荷下最大值也为测点2的z轴方向,测点2的振动RMS值波动范围为20~25g,随着载荷的增大,其振动RMS值逐渐增大,这一特性与1挡类似。测点1与测点2的z轴方向振动RMS值最大,测点3、测点4、测点5、测点6、测点7、测点8、测点10上y轴方向的振动RMS值最大,在测点9上x轴方向的振动RMS值最大。
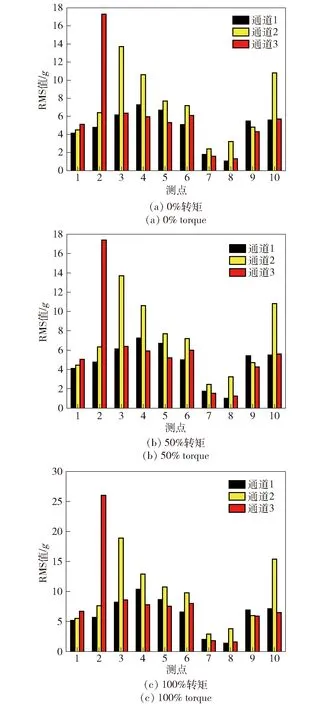
图6 2挡转速2 500 r/min时振动RMS值Fig.6 Vibration RMS value at 2 500 r/min in 2nd gear
2.3 4挡振动RMS值分析
在4挡转速2 500 r/min时,各测点的振动RMS值如图7所示。经比较可得4挡各测点的振动RMS值要远远大于2挡,其振动RMS值在各加载载荷下最大值也为测点2的z轴方向,测点2的振动RMS值波动范围为35~58g,随着载荷的增大,其振动RMS值整体逐渐增大,这一特性与1挡、2挡类似。但是测点2在z轴方向上的振动RMS值随着转矩增大反而减少并稳定,这主要是由于测点2位于第2排行星齿轮位置,第2排行星齿轮在此挡位对振动影响较大,随着转矩的增加,行星齿轮载荷不均匀系数变小,第2排行星齿轮偏载逐渐改善,使得其振动RMS值下降。
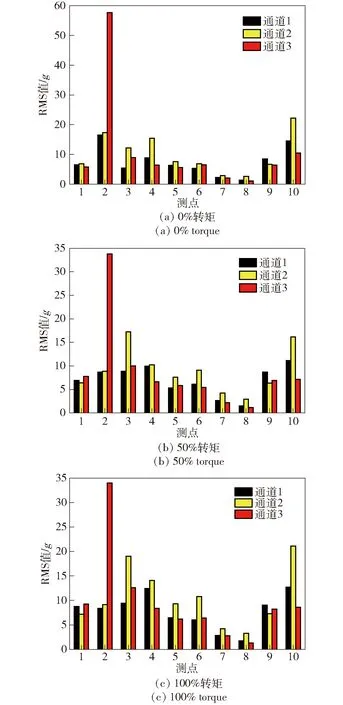
图7 4挡转速2 500 r/min时振动RMS值Fig.7 Vibration RMS value at 2 500 r/min in 4th gear
2.4 倒1挡各测点振动RMS值分析
在倒1挡转速2 500 r/min时,各测点的振动RMS值如图8所示。由图8可知:在此挡位测点10的y轴方向振动RMS值最大,波动范围为2.5~20.0g;在倒1挡,y轴方向上的振动RMS值整体较大,说明在倒1挡时主要需控制轴向的窜动。
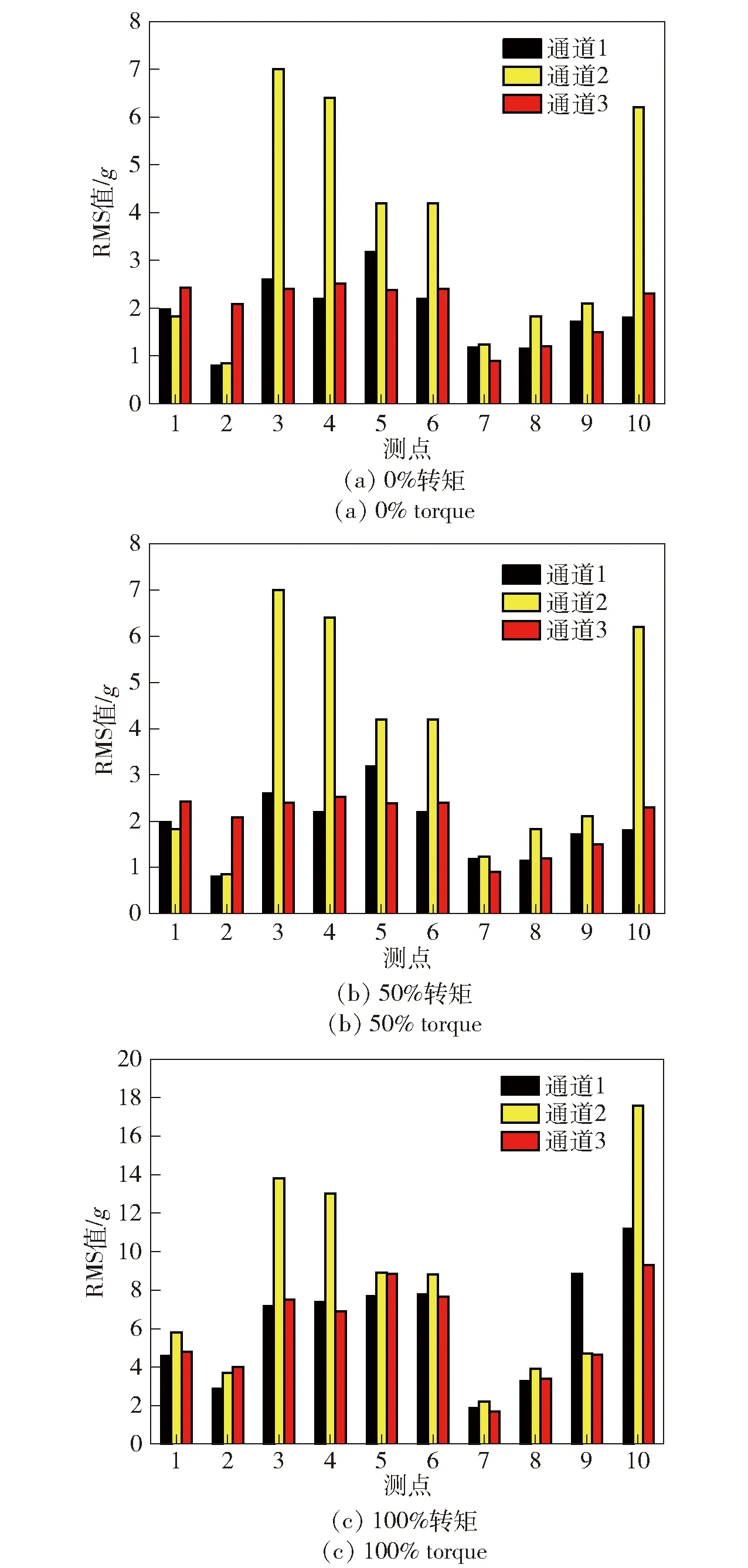
图8 倒1挡转速2 500 r/min时振动RMS值Fig.8 Vibration RMS value at 2 500 r/min in reverse 1st gear
2.5 各挡位工作构件与振动RMS值关系
根据表2各挡位工作构件,行星变速机构在1挡工作时,主要的工作构件是第2排、第3排行星齿轮,2挡时工作构件为第1排、第2排、第3排行星齿轮,4挡时工作构件为第1排、第2排行星齿轮,倒1挡的工作构件为第1排、第3排行星齿轮。通过比较振动RMS柱状图,可以发现1挡、2挡下测点2的z轴方向(径向)有较大的振动,倒1挡下测点2的振动很小。根据振动测点的位置,测点2位于第2排行星齿轮处,当第2排构件参与啮合时,测点2的z轴方向会有较大振动;在1挡、2挡时,由于第2排行星齿轮参与工作,所以其测点2的振动较大;当挡位处于倒1挡时,测点10位于第3排行星齿轮处,第3排行星齿轮参与工作,其测点行星齿轮振动RMS值较大。
3 行星变速机构振动测试频谱分析
3.1 1挡振动频谱
1挡y轴、z轴方向上的振动频谱如图9所示。由图9可知:在1挡2 500 r/min下,在y轴方向测得最大振幅为1g,频率为1 046 Hz,其频率与第2排行星齿轮的理论啮合频率为1 032.4 Hz较吻合。第2个波峰振动频率为2 092 Hz,与第2排行星齿轮2倍频2 064 Hz一致。试验测得y轴方向第3个波峰的频率为3 083 Hz,与第2排行星齿轮啮合频率的3倍频3 096 Hz吻合。y轴方向第4个波峰的频率为4 074 Hz,经分析与第2排行星齿轮啮合频率的4倍频对应,其4倍频的理论值为4 128 Hz.y轴方向上第5个波峰的试验频率为6 166 Hz,经分析与第2排行星齿轮齿轮啮合频率的6倍频对应,其第2排行星齿轮的啮合频率的6倍频为6 194.4 Hz.
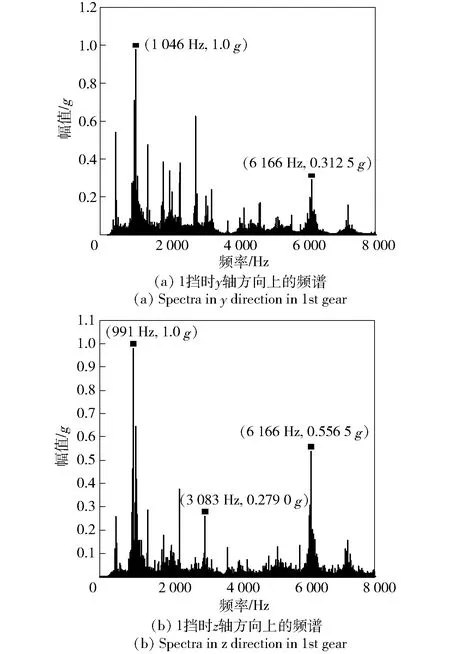
图9 1挡时y轴、z轴方向上的振动频谱Fig.9 Vibration spectra in y and z directions in 1st gear
对比1挡y轴和z轴方向的频谱,发现谱结构类似,能量主要集中在二排啮合频率及其2倍频、3倍频、4倍频、6倍频,但z轴方向各频率幅值更高。但是其实际测量的频率和理论频率还有一定差异,造成差异的原因是输入转速2 500 r/min是理论值,实际试验过程中输入转速有一定波动。
3.2 2挡振动频谱
2挡y轴、z轴方向上的振动频谱如图10所示。由图10可知:在2挡2 500 r/min下,试验测得在y轴方向第1个波峰测的频率为876.5 Hz,与第3排行星齿轮的理论啮合频率为876.6 Hz对应。试验测得在y轴方向第2个波峰振动频率为1 974 Hz,经分析与第2排行星齿轮啮合频率对应,其理论啮合频率为1 948 Hz. 试验测得在y轴方向第3个波峰值频率为3 948 Hz,经分析为第2排行星齿轮2倍啮合频率对应,其2倍理论啮合频率为3 896 Hz. 试验测得在y轴方向第4个波峰频率为5 818 Hz,经分析为第2排行星齿轮3倍啮合频率对应,其3倍理论啮合频率为5 844 Hz.
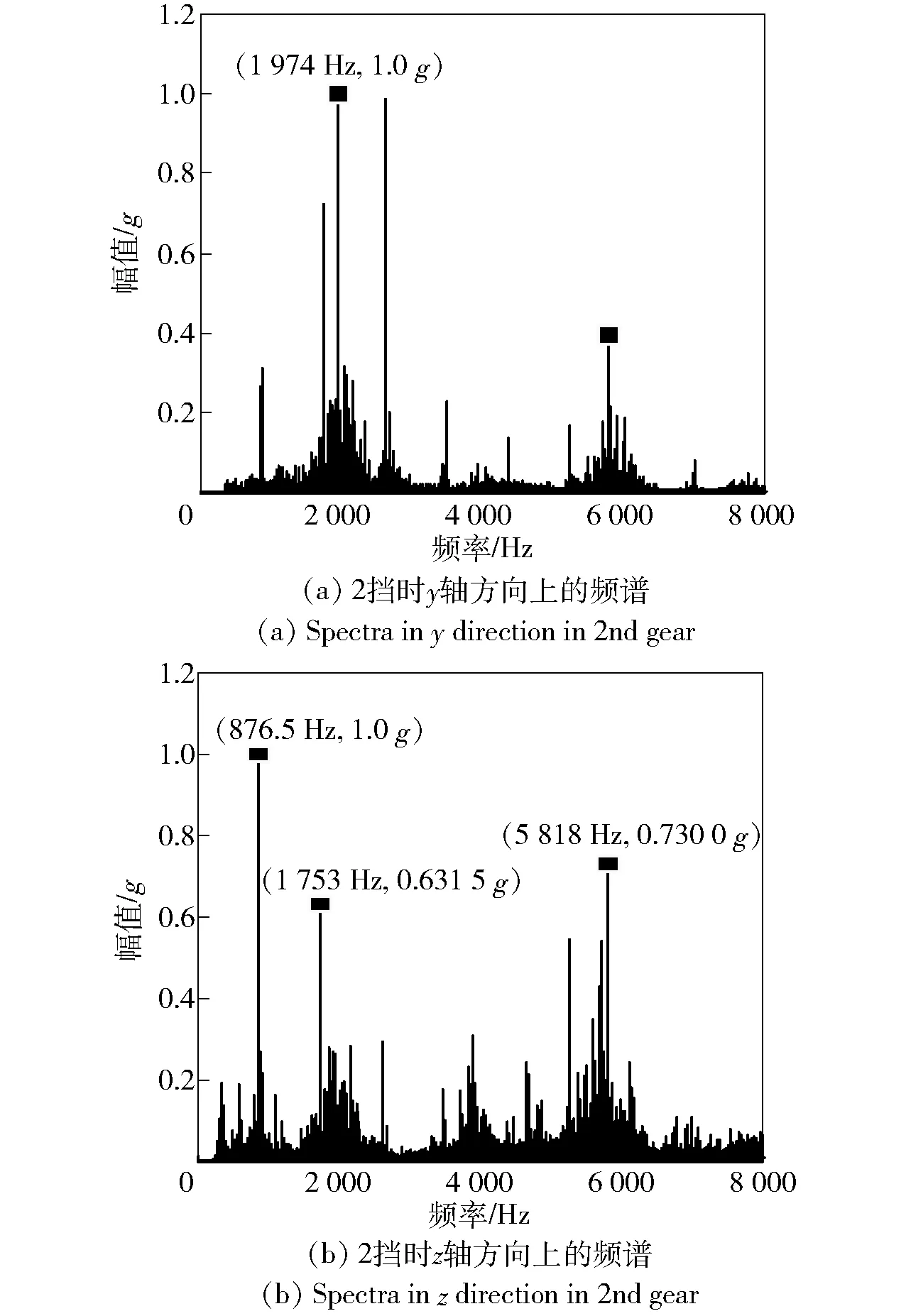
图10 2挡y轴和z轴方向上的振动频谱Fig.10 Vibration spectra in y and z direction at 2nd gear
对比2挡y轴和z轴方向的频谱,发现谱结构类似,能量主要集中在第3排行星齿轮啮合频率、第2排啮合频率及其2倍频、3倍频。但z轴方向各频率幅值更高,z轴方向上3倍频幅值最高。
3.3 4挡振动频谱
4挡y轴、z轴方向上的振动频谱如图11所示。由图11可知:在4挡转速2 500 r/min下,试验测得在y轴方向第1个波峰频率为1 974 Hz,与第2排行星齿轮的理论啮合频率为1 948 Hz对应。试验测得在y轴方向第2个波峰振动频率为3 948 Hz,经分析与第2排行星齿轮啮合频率对应,其理论啮合频率为3 896 Hz. 试验测得在y轴方向第3个波峰值频率为3 948 Hz,经分析为第2排行星齿轮2倍啮合频率对应,其2倍理论啮合频率为3 896 Hz. 试验测得在y轴方向第4个波峰频率为5 818 Hz,经分析为第2排行星齿轮3倍啮合频率对应,其3倍理论啮合频率为5 844 Hz.
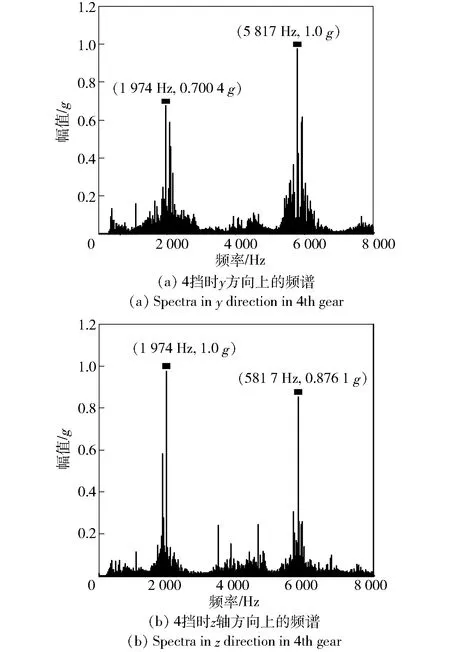
图11 4挡y轴和z轴方向上的振动频谱Fig.11 Vibration spectra in y and z directions in 4th gear
3.4 倒1挡振动频谱
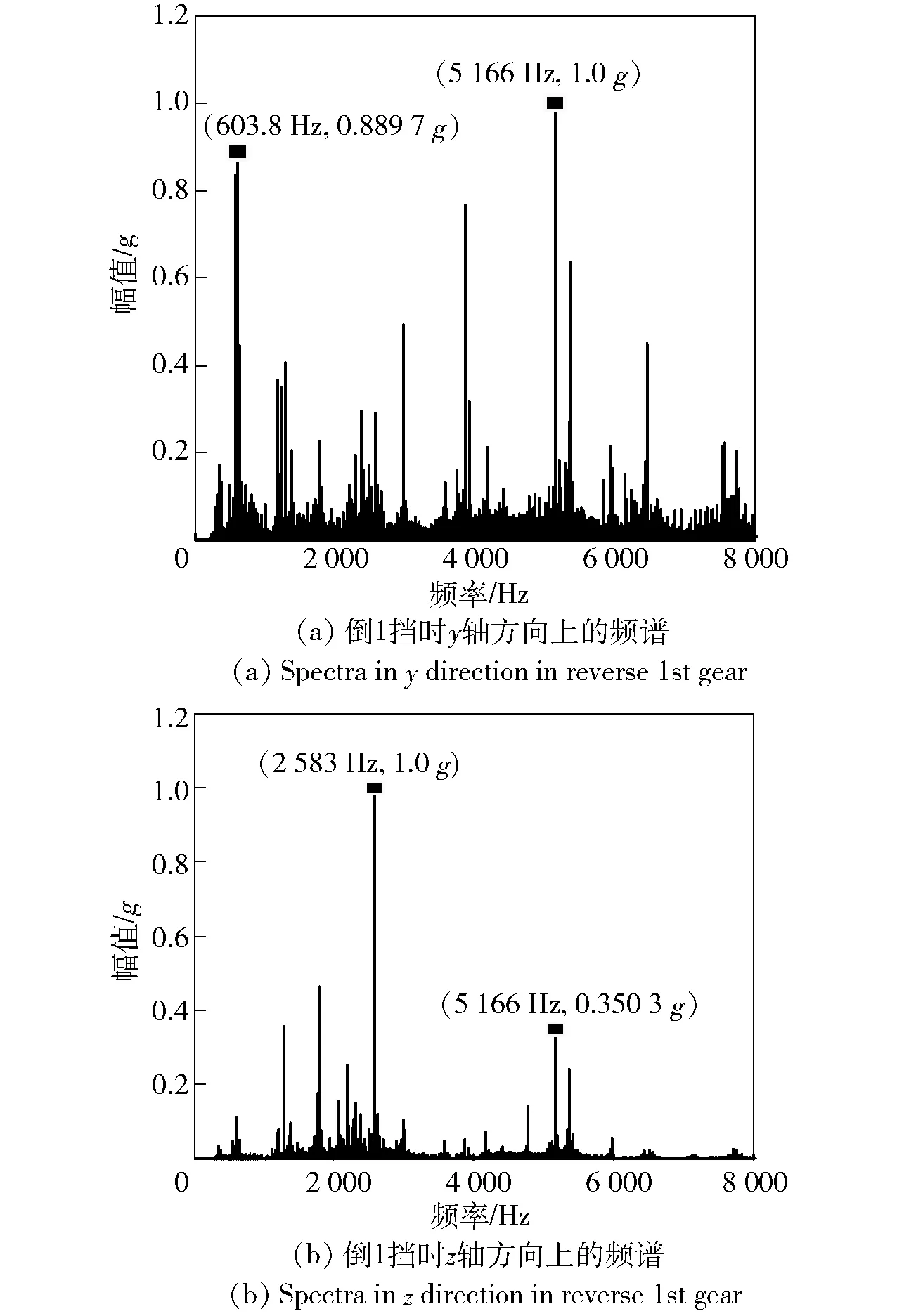
图12 倒1挡时y轴和z轴方向上的振动频谱Fig.12 Vibration spectra in y and z direction at reverse 1st gear
倒1挡y轴、z轴方向上的频谱如图12所示。由图12可知:在倒1挡2 500 r/min下,试验测得的y轴方向频谱第1个波峰值为603.8 Hz,与第3排行星齿轮的啮合频率597.17 Hz吻合;y轴方向上的第2个波峰值为1 292 Hz,与第1排形成齿轮啮合频率1 291.7 Hz对应;第3个波峰值为1 791 Hz,为第3排行星齿轮的3倍频,其3倍频的理论值为1 791.57 Hz. 在倒1挡2 500 r/min下,试验测得的z轴方向上的频谱前2个波峰与y轴方向频谱类似,第3个波峰频率为2 583 Hz,与第1排行星齿轮的2倍频吻合,其2倍频理论值为2 583.4 Hz;第4个波峰为3 875 Hz;与第1排行星齿轮的3倍频吻合,其3倍频的理论值为3 875.1 Hz.
通过对比倒挡y轴和z轴方向的振动频谱,y轴方向能量主要集中在第1排啮合频率,z轴方向能量主要集中在第1排啮合频率及其2倍频、3倍频。
振动特性测试结果比较客观地反映了内部激励与振动特性的映射关系,为进一步对行星齿轮优化提供了参考。通过齿轮修形和结构优化措施可以有效地减少其运行时的振动冲击。
4 结论
本文对高速履带车辆某7挡行星变速机构振动特性进行了测试与分析,通过搭建行星变速机构振动台架及其测试系统,完成了行星变速机构在2 500 r/min 3种载荷、4个挡位的时频和频谱分析。具体结论如下:
1)行星变速机构振动RMS值与测点位置相关联。测点位置有行星齿轮啮合,其振动RMS值较大,且随着转矩增大,其振动RMS值也增大。
2)行星变速机构频谱分析结果表明,其振动能量主要集中于行星齿轮啮合的啮合频率及倍频,且轴向频谱和径向频谱比较相似。
3)通过行星变速机构振动RMS值的测定和频谱分析,得到了各位置啮合振动最大幅值。
行星变速机构实际运行过程中,由于受到外部复杂多变的载荷和冲击及内部液力变矩器的缓冲,其运行时振动特性和台架测试系统会有一定的不同,后续需要更加深入的研究。