基于VR技术的机械类课程实验项目设计与实例
2019-08-03江本赤梁利东贾文友王建彬刘有余
江本赤 梁利东 贾文友 王建彬 刘有余

摘 要 鉴于虚拟现实技术日益广泛的工程应用现状,为增强机械类课程实验教学的生动性,加深学生对复杂设备机械结构和原理的感性认识,对基于虚拟现实技术的实验教学项目设计与实施方法进行探讨。为验证所提方法的有效性和实用性,以CA6140车床为例,开发一套VR模块化装调系统,以期为机械专业相关课程的实验教学改革提供参考。
关键词 虚拟现实技术;机械类课程;实验项目设计;仿真实验;Unity3D;CA6140车床
中图分类号:G642.423 文献标识码:B
文章编号:1671-489X(2019)02-0036-03
1 引言
虚拟现实(Virtual Reality,简称VR)技术是一种集计算机技术、图形图像技术、人机交互技术及传感技术于一体的综合性多学科交叉技术[1-2]。2016年被认为是中国虚拟现实元年,硬件市场规模近21亿元[3]。VR技术由于可交互的临场感,其工程应用正在向诸多领域渗透,在机械工程中亦得到日益广泛的应用[4]。用户首先需进行模型创建,明确虚拟场景中各物理要素的几何信息,并进行三维建模;然后搭建虚拟环境,将模型以一定的格式导入可视化软件开发环境,并确定各要素间的位置拓扑关系;最后通过专用设备“进入”虚拟环境,可根据需要与场景中的要素进行交互,同时监测和评价场景的状态拓扑。如图1所示,相对于传统的计算机仿真技术,VR技术的沉浸感在交互性方面具有明显优势[5]。
基于上述原理开发的虚拟机械实验,无须直接接触机械设备,而是借助VR技术的沉浸感达到实验教学的目的。鉴于机械类课程实验设备成本较高,复杂机械装备的工作原理枯燥难懂的特点,开发虚拟实验项目,对于降低实验成本,提高实验教学质量具有重要意义。
本文在分析机械类课程中典型实验特点的基础上,探讨基于VR技术的实验项目设计方法,旨在降低实验成本,帮助学生了解新技术;通过运用对CA6140车床的虚拟拆装系统,验证可视化交互仿真实验的可行性。
2 虚拟实验的环境搭建
机械类课程实验中常涉及复杂机械装备的结构组成、运动传递和工作原理等问题。在设计虚拟实验时,需结合实验任务特点,选择合适的应用软件,配置好VR硬件参数,搭建出经济适用的沉浸式可视化可交互实验平台。
软件选择与场景建模 首先对实验相关各物理要素进行三维建模。三维模型的获取方法有很多,在此不再赘述。对于机械类专业的VR仿真实验,本专业学生所熟悉的三维造型軟件即可满足要求,如UG、Pro/E、SolidWorks等。
然后选择实现虚拟现实技术的支撑软件。完成场景的三维建模之后,还需要选择VR实验项目的开发环境。目前市场上有多款功能相似的VR应用程序开发引擎,如Unity3D、Quest3D、Virtools等。其中,Unity Techno-logies公司推出的Unity3D是一种可创建实时三维动画、建筑可视化、三维视频游戏等互动内容的多平台综合型开发工具,其编辑器可运行在Windows和Mac OS X下,并可发布Windows和Android等平台支持的可执行文件。Unity3D
是当今在虚拟现实领域应用最为广泛的跨平台应用程序开发引擎,本文将选用该软件进行VR实验案例开发。
在完成三维建模之后,通常得到的是prt或stl等格式的模型数据,一般需要将其转换成开发环境所接受的中间文件格式。如Unity3D需要格式转换成fbx格式,该格式文件占据的存储空间相对较小,有利于提高程序处理速度。目前有多款软件支持这种格式转化。
硬件配置与通信测试 虚拟现实系统硬件一般包括双通道投影系统、3D眼镜、头盔显示器、数据手套/手柄以及位置跟踪器等。借助头盔显示器或投影系统与3D眼镜可体验虚拟场景的沉浸感,可用于被动观测;在此基础上,借助数据手套/手柄及位置跟踪器,可用于可视化交互,操作者可在虚拟场景中干预各三维模型要素的状态,如移动某零部件的位置。完成软件部分的准备工作之后,进行硬件连接并调试硬件与软件的通信,测试数据传输的实时性以及硬软件的兼容情况。
3 实验教学项目设计与实例
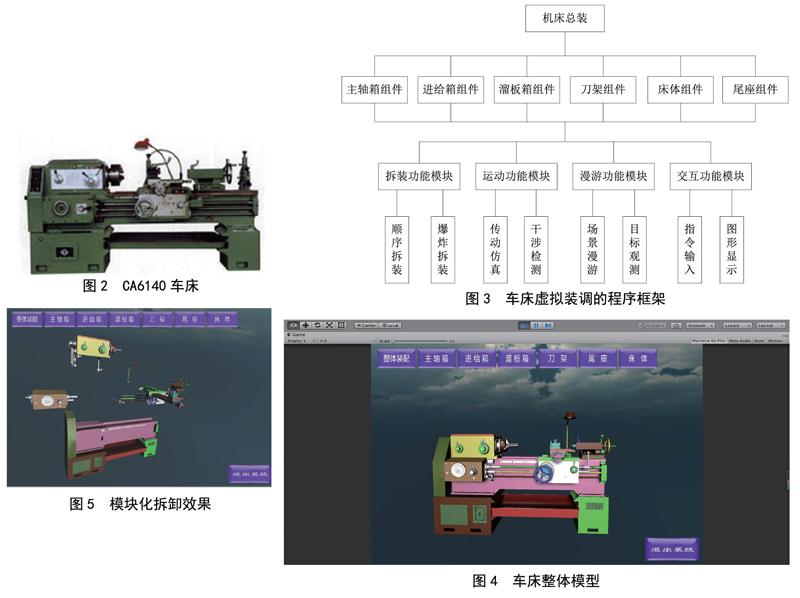
机械类VR实验包括装备的静态观测、虚拟拆卸及装配、工作原理演示和机械仿真加工等内容。针对具体的交互性实验任务,需编写脚本程序驱动运动部件按照既定的轨迹运动,通过VR硬件完成可视化临场感交互。下面以图2所示的CA6140车床为例,选择Unity3D软件开发环境进行模块化虚拟装调试验。
面向实验任务的程序设计 CA6140车床是一款典型的传统机床,许多现行教材仍以其为例进行传动链等机械基础知识的讲解,大多数高校机械类专业学生的金工实习也直接操作过该设备。为便于学生从功能的角度认识机床结构,此处将整个车床结构分为主轴箱、进给箱、溜板箱、刀架、床体和尾座六大组件。依据教学需要所设定的实验任务,将驱动程序划分为拆卸装配、运动传递、漫游和交互四大功能模块,所设计的程序结构如图3所示。
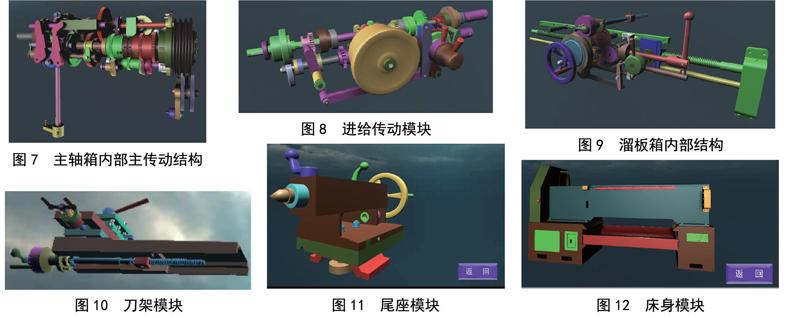
CA6140车床模块化虚拟装调实例 对车床的主要功能部件进行建模,转换成fbx格式之后,导入Unity3D环境,机床整体外观效果见图4。整个虚拟装调系统包括整机和组件的整体场景漫游,以及分步和连续装调的过程演示,其模块化拆卸效果如图5所示,移除车床表层覆盖件可显示内部整体结构,如图6所示。图7是主轴箱内部主要结构,可进一步显示主轴子模块和换向装置的三维结构,可分别显示变速机构和制动装置。
上述四个子模块界面中可进一步进行交互式拆卸和装配。进给箱外形和溜板箱内部结构如图8和图9所示。刀架和尾座部分的结构分别如图10和图11所示。床身模块如图12所示。
4 结语
基于虚拟现实技术的机械仿真实验,具有成本低、灵活性强、效果直观及安全性好等优点。实践表明,合理设计VR实验,可帮助学生快速理解复杂的机械结构原理与操作方法,有助于激发学生的积极性和创造性,并可为其他实践教学环节的改革提供参考。
参考文献
[1]申蔚.虚拟现实技术[M].北京:清华大学出版社,2009.
[2]邸馗,于天彪,陈培媛,等.虚拟现实技术在机械工程实验教学中的应用[J].实验技术与管理,2014,31(10):10-12.
[3]2016年是中国虚拟现实元年,硬件市场规模近21亿元[DB/OL].https://www.ithome.com/html/vr/283239.htm
[4]张菊.虚拟现实技术在实训中的应用研究[J].计算机光盘软件与应用,2014(4):310,312.
[5]吴悦明,何汉武,孙健,等.基于VRML的数控机床的虚拟操作研究[J].机械科学与技术,2005,24(6):723-729.
