高轨卫星机热一体化星敏感器支架设计
2019-07-31王志国张宗华陈双全茅敏
王志国 张宗华 陈双全 茅敏
(上海卫星工程研究所,上海 201109)
星敏感器在航天器姿态测量和控制系统中起着重要的作用,是最精密的姿态测量部件[1]。星敏感器通过测量恒星在星敏感器坐标系下的单位矢量,经过星图识别,寻找观测星在导航星库中的对应匹配,最后根据观测矢量与匹配星对的方向矢量计算姿态[2]。随着高分辨率卫星对星敏感器指向精度的需求越来越高,星敏感器的指向精度要求达到角秒量级[3-4]。高轨高分辨率成像卫星结构热变形对图像定位与配准系统有较大的影响[5],为提高卫星定姿和图像导航配准精度,通常将多台星敏感器按照特定角度安装在星敏感器支架上,以控制星敏感器由于在轨温度变化引起的热变形[6]。国外高精度高分辨率航天器普遍采用多台星敏感器安装于同一支架上,然后再将星敏感器及支架组合体安装于有效载荷光学基板或主体框架上的设计思想。
以往常规支架设计一般要求具有轻量化、高刚度、良好的电导通及传热特性,同时具有足够的强度,因此往往采用轻质铝合金或者镁合金材料整体机加工而成。航天器在轨运行时,这些安装支架处于反复交变的恶劣热环境中,由于金属材料的高热膨胀率将导致其热变形极大,星敏感器指向会发生很大变化,最终导致航天器定姿精度差,拍摄图像模糊,航天器功能降低,甚至丧失。
文章针对某高轨卫星对角秒级星敏感器支架的研制需求,研究了一种高刚度高精度微变形机热一体化星敏感器安装支架。通过采用低变形设计与变形隔离相结合的技术手段,完成了高刚度高精度微变形星敏感器支架设计,满足在轨热变形小于10″,峰峰值小于2.5″的指标要求,为某高轨卫星高精度图像定位提供了技术保障。
1 应用背景
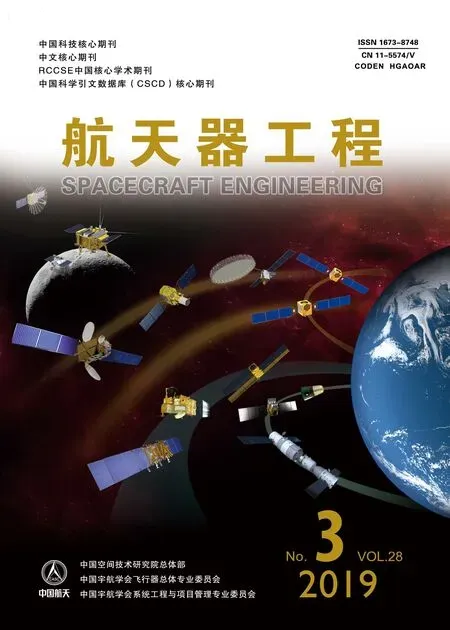
为减少误差环节,高精度遥感卫星的星敏感器都直接安装在光学相机的主体框架上,这样光学载荷视轴将以星敏感器指向作为基准进行在轨标定,提高图像配准精度。根据某卫星的高精度姿态确定方案的需要,需要两台星敏感器同时工作,进行数据融合以提高姿态确定精度,因此姿轨控分系统配置了具有3个头部的高精度分体式星敏感器,如图1所示。
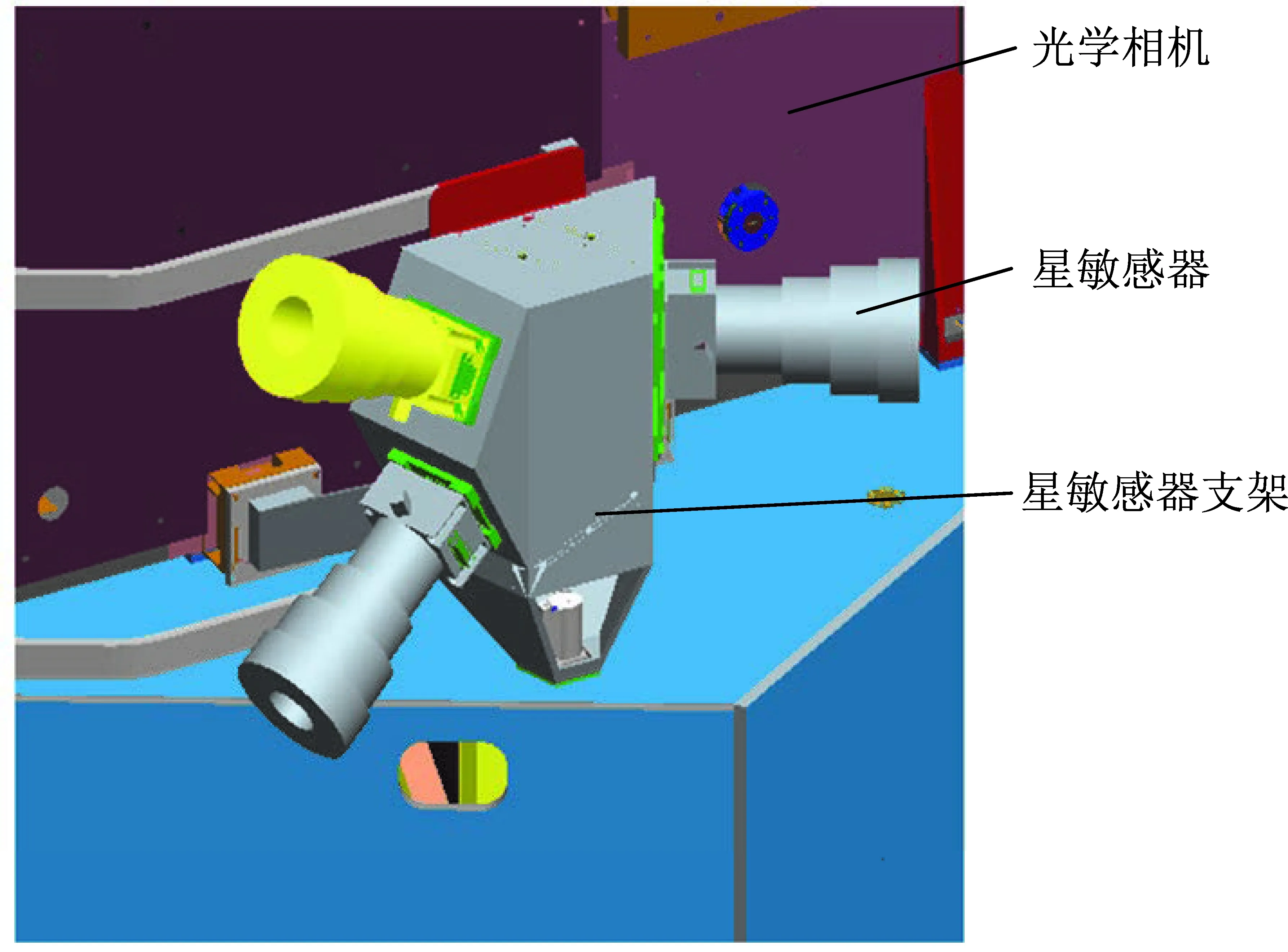
图1 星敏感器及支架安装示意图Fig.1 Schematic diagram of star sensor and bracket
星敏感器头部在整星安装时需要保证以其光轴为中心轴、半锥角30°的圆锥视场内无遮挡物。星敏感器布局时,要考虑避免太阳、地球、月亮以及太阳帆板转动过程中的反射光对星敏感器的影响,为保证2台星敏感器数据融合使用以减小光轴方向的精度误差对姿态确定影响,需要尽量保证3台星敏感器间的夹角尽量大。
Ob-XbYbZb为星敏感器支架参考坐标系(即基准系),Oi-XiYiZi为星敏感器自身坐标系,卫星本体坐标系Ob-XbYbZb绕Xb轴转-90°,再绕Yb轴转29°得到星敏感器1坐标系O1-X1Y1Z1;卫星本体坐标系Ob-XbYbZb绕Zb轴转-71°,再绕Yb轴转60°得到星敏感器2坐标系O2-X2Y2Z2;卫星本体坐标系Ob-XbYbZb绕Zb轴转109°,再绕Yb轴转-120°得到星敏感器3坐标系O3-X3Y3Z3。3台星敏感器的光轴指向空间关系如图2所示。
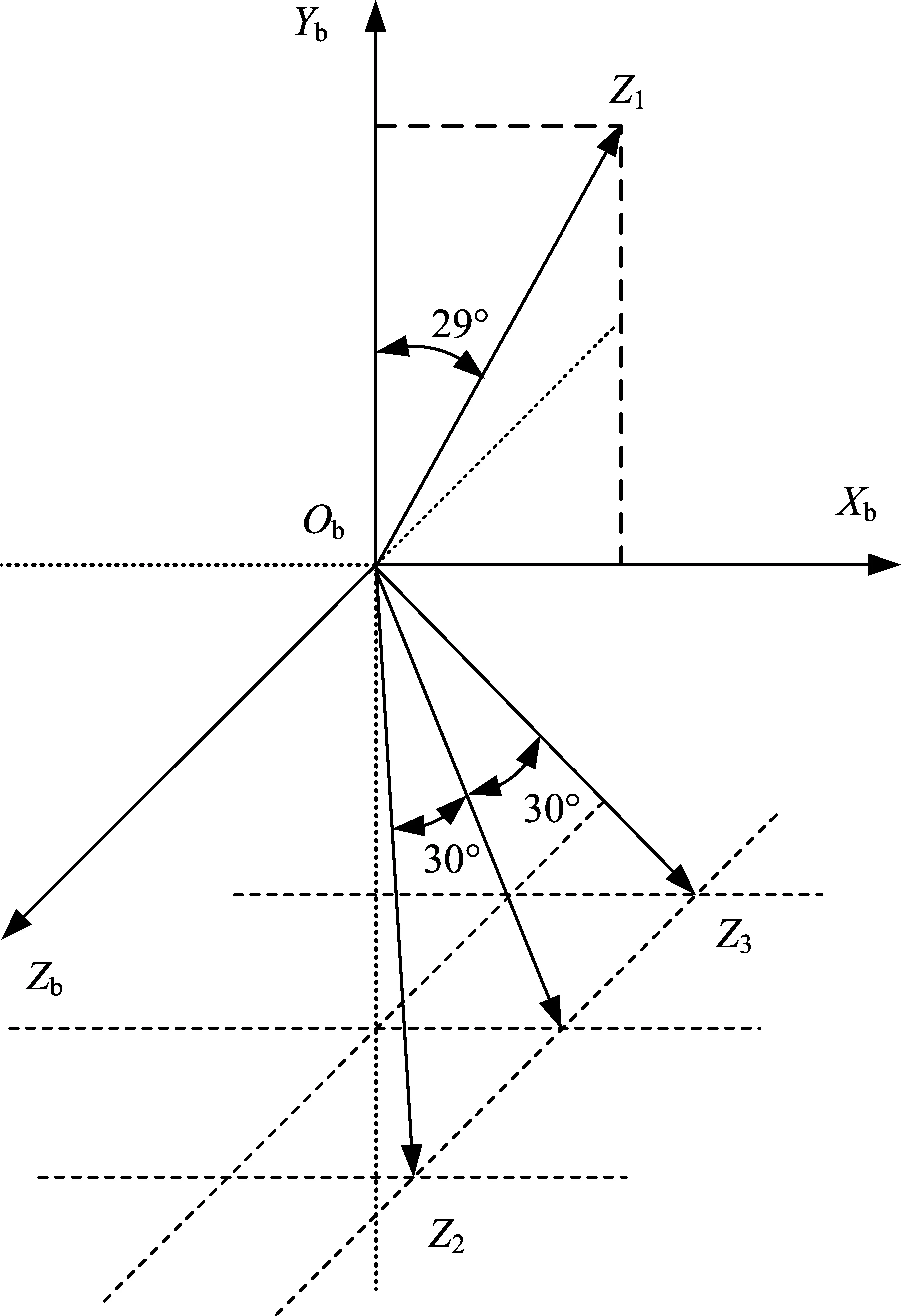
图2 3台星敏感器光轴指向示意图Fig.2 Optical axis pointing schematic diagram of three star sensors
2 星敏感器支架结构设计方案
星敏感器支架方案由薄壁壳体结构、安装腿组件、星敏感器安装板、热量收集板和热管等组成,其包络尺寸为ObXb方向427 mm,ObYb方向561 mm,ObZb方向576 mm,结构质量约8.7 kg。星敏感器支架设计方案如图3所示。
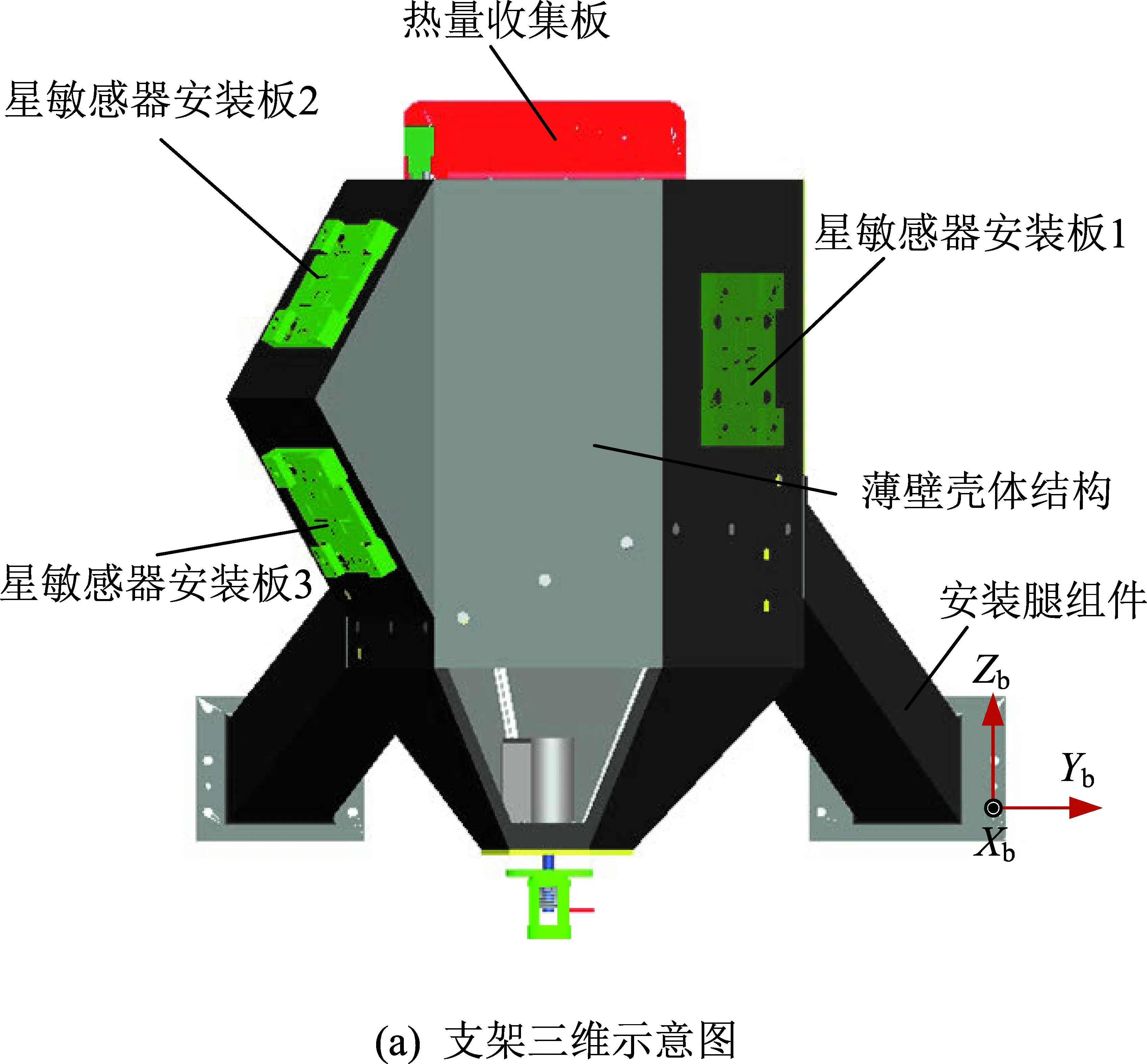
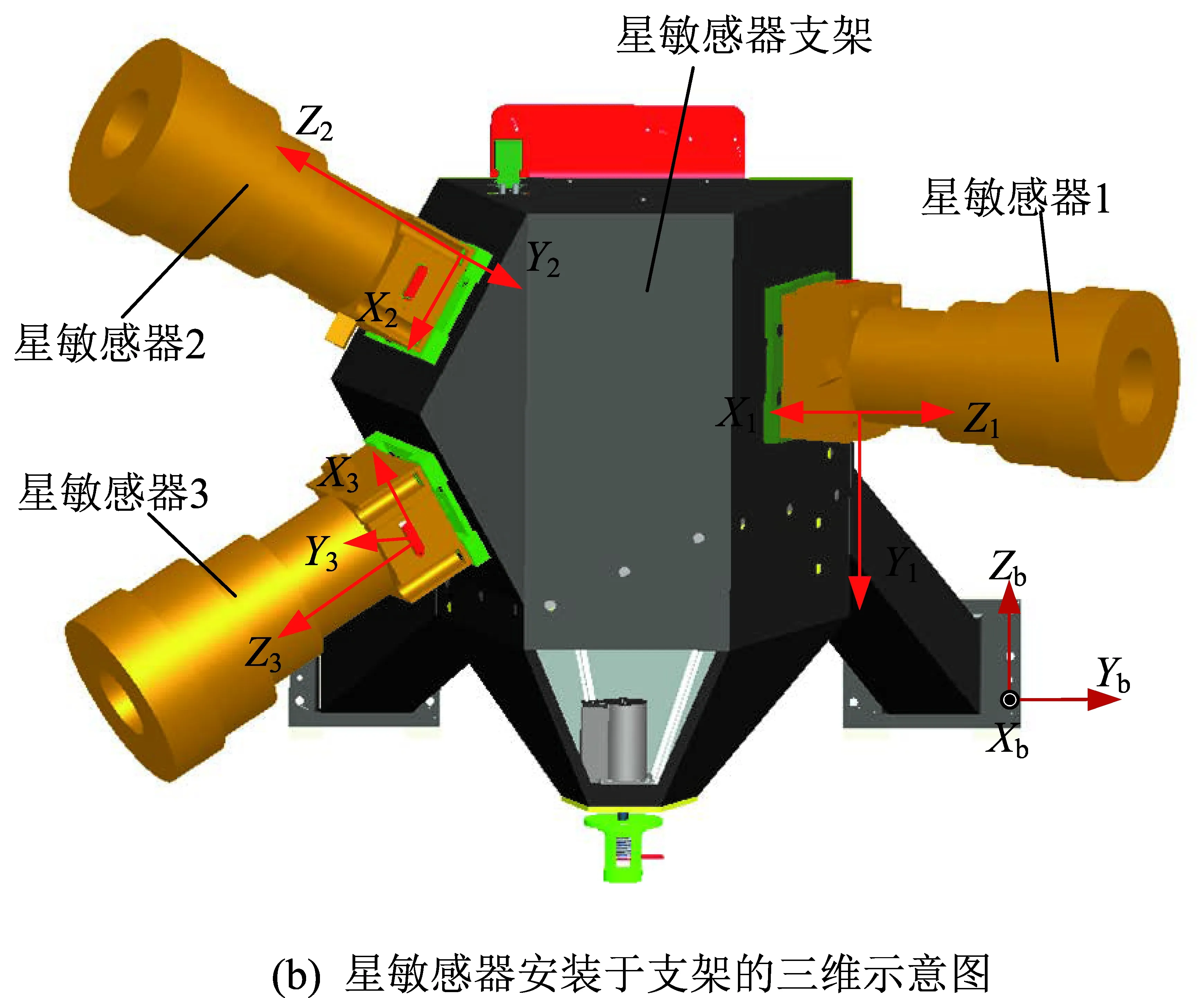
图3 星敏感器支架结构设计Fig.3 Structural design of star sensor bracket
为提高星敏感器支架的刚度,薄壁壳体结构、安装腿组件采用高比刚度的M55J碳纤维复合材料制造;为满足星敏感器的安装界面要求,星敏感器安装板采用铝合金材料6061制造,这样与星敏感器结构壳体底面热膨胀特性基本一致,实现热变形协调;为保证星敏感器在轨工作时(20±3) ℃的工作环境,使用充氨热管连接在安装板和热量收集板之间,连接处采用柔性连接装置,达到传热和变形隔离的双重目的。考虑到卫星在轨运行时,热量收集板温度达到-30 ℃左右,因此该零件采用高导热低膨胀的铝基碳化硅制造,这样既能够降低热变形又提升了传热能力。
根据星敏感器布局情况,星敏感器安装面1使用热管1,星敏感器安装面2、3共用热管2,为提高热管的工艺性,选择平面弯曲形式,同时为减小热管对星敏感器安装面的拉扯效应,热管均布置在星敏感器安装面中心线上,热管与安装板采用柔性碟簧+螺钉的连接形式,如图4所示。

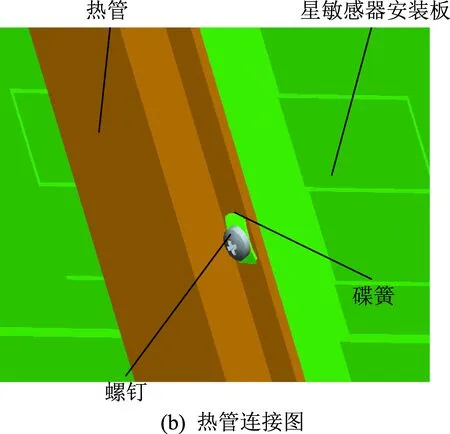
图4 星敏感器安装板传热设计Fig.4 Thermal transfer design of star sensor mounting plate
3 力学分析及验证
3.1 力学分析
卫星发射时,星敏感器支架要承受复杂的动力学环境,星敏感器支架与星敏感器组合体的模态特性直接决定星敏感器安装面的动力学性能。为保证星敏感器安装面有较好的力学界面,一般要求星敏感器支架与星敏感器组合体的一阶固有频率大于100 Hz。根据星敏感器支架的结构设计方案,采用MSC.Patran&Nastran平台建立星敏感器支架与星敏感器组合体有限元模型,进行整体模态分析,经分析,一阶频率为172.7 Hz,如图5、图6所示。
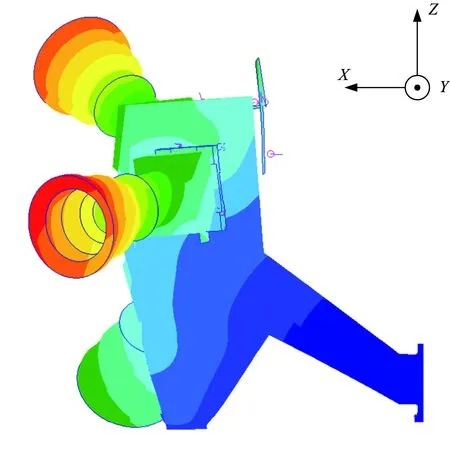
图6 星敏感器支架组合体一阶模态振型(X向弯曲)Fig.6 First order modal pattern of star sensors and bracket assembly
3.2 试验验证
模态试验主要是获得星敏感器支架在满载状态下的模态频率、模态阻尼和固有振型,验证星敏感器支架主模态频率是否满足技术指标要求。试验采用锤击法进行,试验表明(表1),星敏感器支架与3台星敏感器组合件的一阶频率为178.4 Hz,与分析结果基本一致,如图7所示。
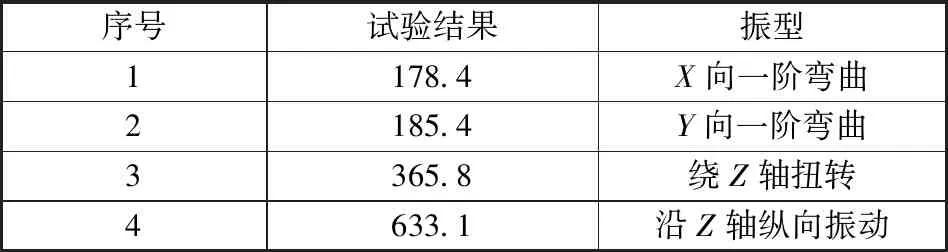
表1 模态试验结果Table 1 Modal test results Hz
将星敏感器支架和3台星敏感器组合体安装于卫星上,在整星状态下,进行X、Y、Z三个方向鉴定级振动试验(5~100 Hz)。由于组合体整体频率远高于100 Hz,振动试验时,星敏感器安装面X、Y、Z三个方向振动响应最大值分别为4.61gn、3.85gn、3.03gn,远小于星敏感器允许的振动量级包络线,安装界面良好的振动环境有效保护了星敏感器光学器件。振动曲线如图8(对数坐标)所示。

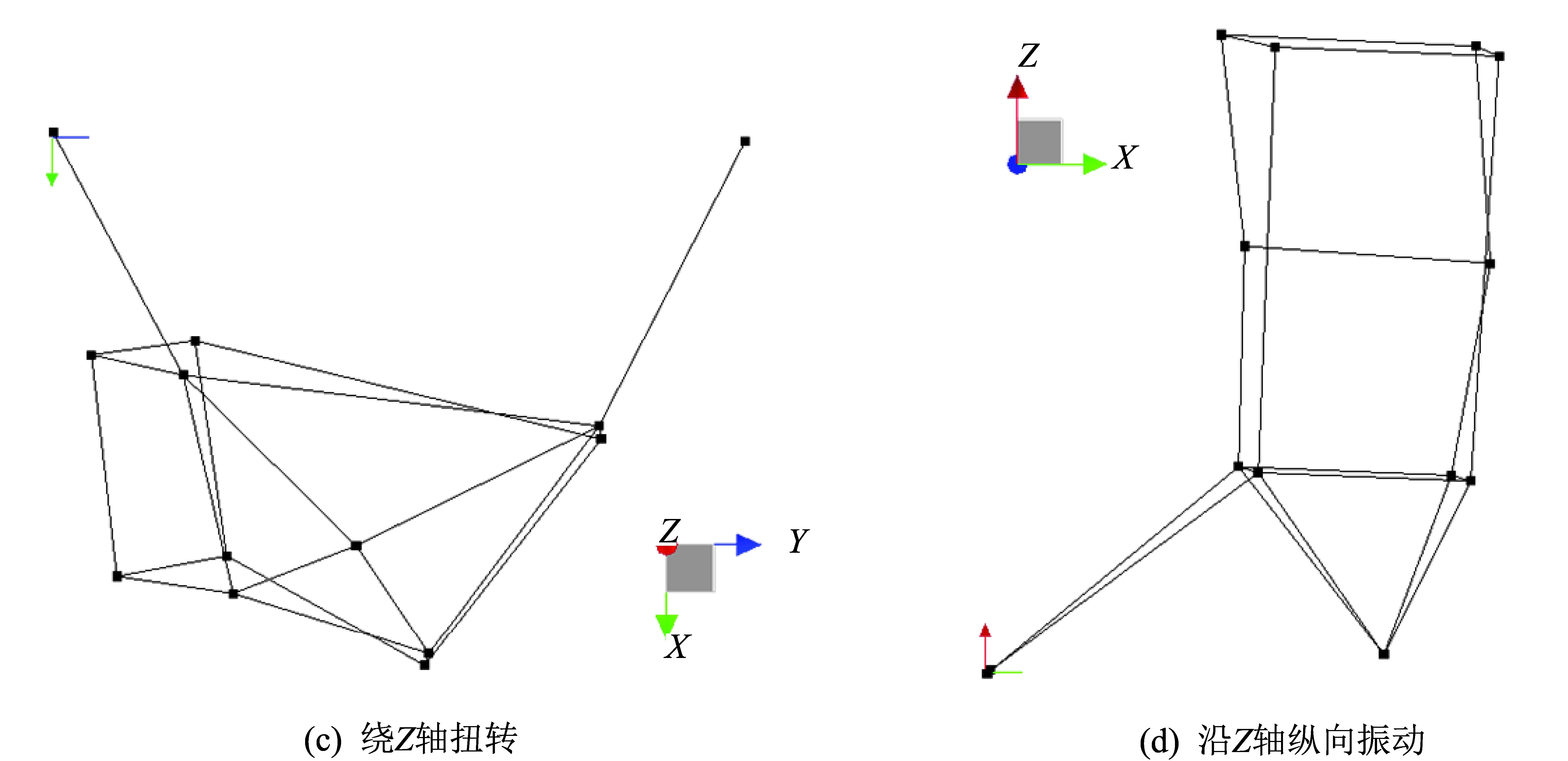
图7 星敏感器支架模态振型Fig.7 Modal vibration of star sensor bracket

图8 星敏感器安装面振动试验曲线Fig.8 Vibration test curve of star sensor mounting suface
4 热变形分析及验证
4.1 欧拉角定义
通过欧拉角“3-1-2”顺序旋转将不同坐标系联系起来,OX0Y0Z0为变形前基准系,OXYZ为变形后坐标系,于是坐标系OX0Y0Z0和OXYZ之间的坐标变换关系即为[3]
(1)
(2)
当欧拉角ψ,φ,θ均为小量时,则上述矩阵的小参量式为
(3)
式中:ψ为偏航角;θ为俯仰角;φ为滚动角。
变形后坐标系OXYZ在变形前基准坐标系OX0Y0Z0中的方向余弦矩阵为
(5)
欧拉角和方向余弦阵元素之间的关系有
(6)
4.2 热变形分析
4.2.1 温度场施加方法
采用径向基函数插值方法[7-8],对空间四变元散乱温度场数据进行映射,径向基函数在四维空间上插值计算具有简单、高效、精确度高的优点。
插值的大致流程:通过计算目标场点阈值确定的球内的源场点,提取对目标场点数据值产生贡献的源场点数据值,根据距离权值,分别计算球内源场点数据值对目标场点值的贡献,最后获取目标场点数据值。
星敏感器支架温度场映射结果几乎和温度源场一致,具体如图9所示。
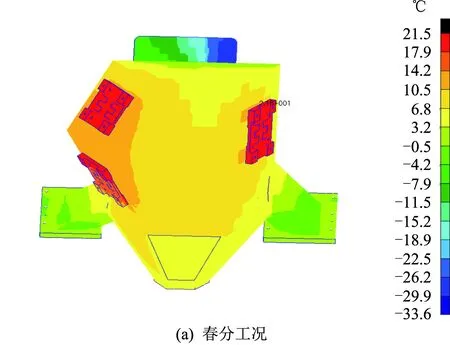
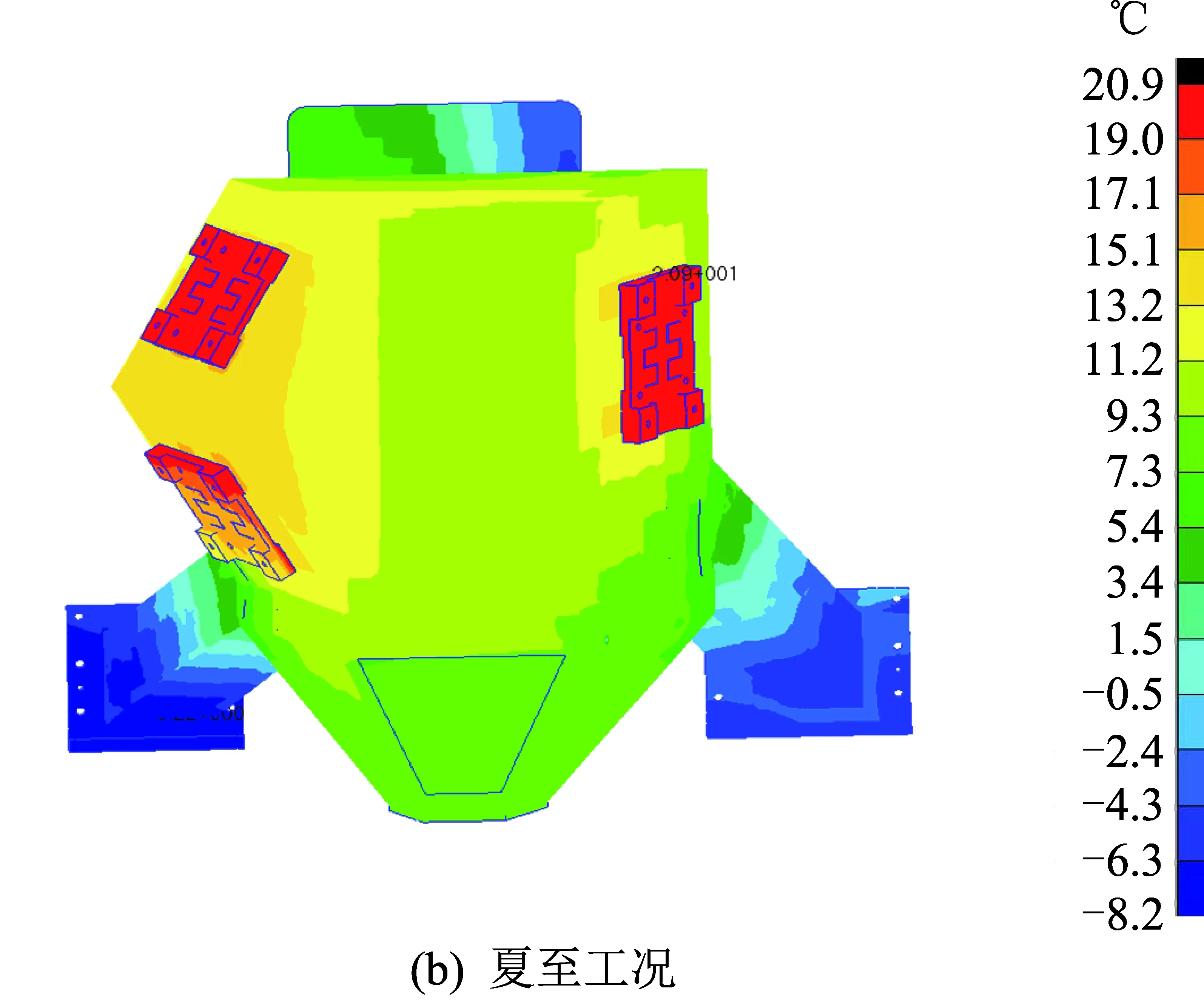
图9 极端工况下星敏感器支架温度场分布Fig.9 Temperature field of star sensor bracket under extreme conditions
4.2.2 分析结果
根据4.1节热变形的角度定义,分别计算卫星在轨极端工况下春分、夏至的星敏感器安装面的欧拉角变化量,同时计算变化量的峰峰值,每个工况均分析一天变化情况,每隔2 h计算一次,星敏感器安装面指向最大变化量如表2所示,最大变化量与最小变化量的差值(峰峰值)如表3所示。计算结果表明,星敏安装面指向最大变化量为7.03″,指向峰峰值为1.81″。热变形云图如图10所示。

表2 星敏感器安装面最大变化量Table 2 Maximum deformation of star senor mounting surface (″)

表3 星敏感器安装面变化峰峰值Table 3 Peak to peak value of star senor mounting surface (″)
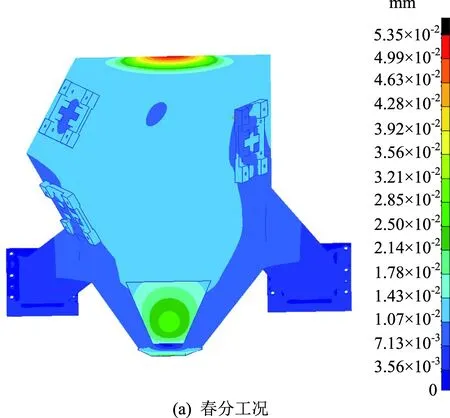
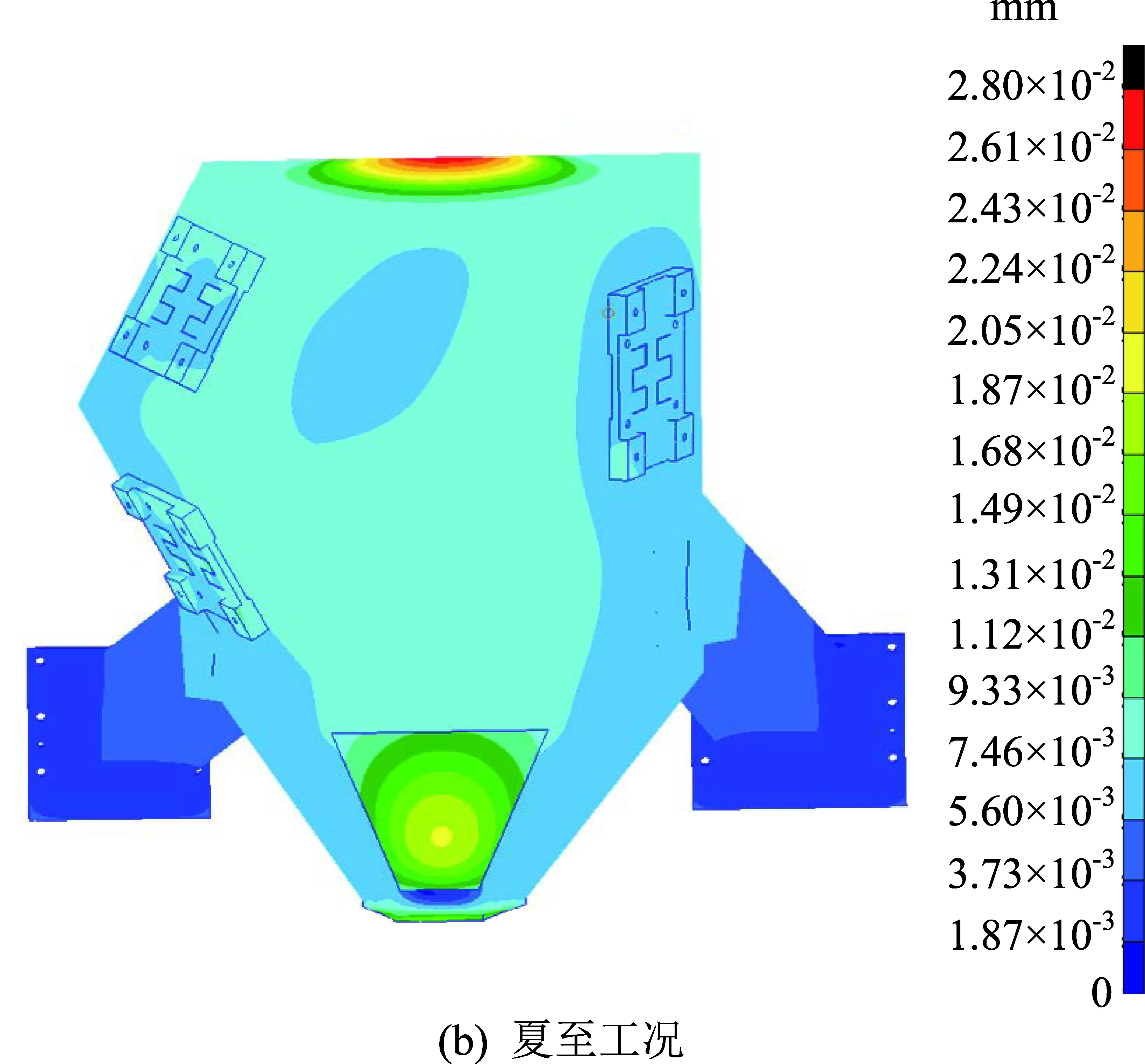
图10 星敏感器支架的热变形云图Fig.10 Thermal deformation diagram of star sensor bracket
4.3 试验验证
在大气环境下,通过粘贴加热片和流体回路冷却的方式对星敏感器支架进行温度控制,模拟星敏感器支架的温度分布,通过光电自准直仪对星敏感器支架热变形引起的星敏感器安装面指向变化进行测量,验证星敏感器支架设计的合理性。
星敏感器模拟件采用等刚度钛合金金属板制造,在星敏感器模拟件中心位置粘贴反射棱镜,反射棱镜的坐标系与星敏感器安装面坐标系保持一致。采用6台光电自准直仪(编号1#~6#)进行测量,一台光电自准值仪同时监测一个镜面两个方向的变化。光学自准直仪是将角度测量转换为线性测量的一种计量仪器,由于其测量分辨率和准确度高,故广泛用于小角度测量、导轨的平直度测量等方面[9]。光电自准值仪将近似平行光垂直投射到棱镜镜面上,利用反射像相对初始位置的偏移位移量d和物镜焦距f,便可计算出棱镜镜面的倾斜角度[10]。热变形试验测量方案见图11所示。
试验表明,星敏感器安装面最大变化量为6.41″,变化峰峰值1.58″,量值上与分析结果基本一致,春分、夏至工况下热变形试验结果如表4、5所示。

表5 星敏感器安装面变化峰峰值Table 5 Peak to peak value of star senor mounting surface (″)
5 结束语
本文针对某高轨卫星对角秒级星敏感器支架的研制需求,研制了一种高刚度高精度微变形机热一体化星敏感器安装支架。该支架通过热管实现星敏感器散热,同时热管与其它结构件采用柔性装置连接,从而实现热变形隔离;支架中热量收集板采用新型铝基碳化硅复合材料制备而成,既提高了传热性能又降低了其热变形对周围结构的影响;支架主体结构采用碳纤维复合材料制备,这样确保了星敏感器支架具有较大的比刚度。试验表明:星敏感器支架与星敏感器组合体的一阶固有频率为178.4 Hz,星敏感器安装面动力学环境良好,同时在轨春分、夏至极端工况下,星敏感器安装面最大变化量为6.41″,峰值为1.58″,实现了卫星在轨姿态确定精度优于2.8″,满足了卫星高精度图像定位需求。