利用地月平动点轨位资源拓展航天器应用
2019-07-31张立华王鹏张燕
张立华 王鹏 张燕
(航天东方红卫星有限公司,北京 100094)
平动点(Libration Point)也叫拉格朗日点(Lagrange Point),是二体旋转系统的引力动平衡点。地月平动点是地月旋转系统的引力动平衡点,运行在地月平动点轨道上的航天器能够俯瞰地月空间,以较低的推进剂消耗保持与地球和月球的相对几何关系,地月平动点特殊的动力学特性和在地月系统中相对固定的几何位置,使其具有重要的开发利用价值。
1950年,英国科幻小说家阿瑟·克拉克就提出了在地月L2点放置飞行器实现月球背面与地球之间通信转发的想法,这是人类第一次提出针对平动点的应用[1]。1963年,美国喷气推进实验室(JPL)的Kliore提出了利用地月平动点实现对月球背面和极区中继通信的方案设想,还对利用地月平动点开展天文观测、星际尘埃观测、建立导航信标的可能性进行了论证[2]。
尽管地月平动点的应用首先进入人类视野,但日地平动点却先得到应用。1978年8月,NASA向日地L1点发射了长期连续监测太阳活动的国际日地探测器-3(ISEE-3)。由于日地L1和L2点轨道是进行一些空间天文观测的理想场所,至今,各国已经发射了10多颗绕日地L1和L2点轨道运行的航天器,并有更多的探测任务正在计划中,包括詹姆斯·韦伯空间望远镜。
地月平动点轨道的进入则姗姗来迟,直到2010年,美国的ARTEMIS任务才进入到地月L1和L2点,运行了不到一年时间,开展了一些科学探测和试验验证工作。随后,我国的嫦娥五号飞行试验器在完成了预定任务后,也于2015年初进入了绕地月L2点运行的轨道,开展了短期的拓展试验。
地月平动点应用的研究主要集中在中继通信、导航和深空探测中转站等方面。美国的约翰·霍普金斯大学(JHU)、麻省理工学院(MIT)、科罗拉多大学等高校,NASA的JPL、戈达德(Goddard)航天中心、格伦(Glenn)研究中心等研究机构以及休斯公司、波音公司、微卫星(MicroSat)公司等工业部门都开展了专题研究和方案论证,提出了很多解决方案[3]。
20世纪60年代至70年代初,伴随着月球探测任务的兴起和阿波罗(Apollo)登月计划的实施,在NASA的组织下,结合月球中继通信任务需求,掀起了地月平动点应用研究的第一轮热潮,很多中继通信卫星方案都采用了地月L1/L2点轨道。由于当时技术能力等条件限制,研究论证工作还停留在设想和概念阶段,工程可实现性不强。
在20世纪90年代开始的新一轮月球探测热潮中,美国和欧洲对利用地月平动点轨道实现中继通信和导航定位的方案又开展了大量的研究论证工作,很多方案也都选择了地月平动点轨道,这一阶段的论证大多基于已有的成熟卫星平台,具有较好的工程可实现性。基于地月L1/L2点轨道支持月球和深空探测任务的中转站是这一时期研究论证的另一个重点方向。
针对基于地月平动点轨道的航天器进行中继通信和导航应用,国内也开展了一些研究和论证工作,包括轨道方案研究[4]、系统方案研究和发展建议[5-6]、中继通信和导航应用效能分析[7]等。
60多年来,针对地月平动点的开发利用,国内外开展了很多研究论证和在轨试验验证,但真正的应用一直未能实现,直到2018年,随着运行在地月L2点Halo轨道上的嫦娥四号中继星“鹊桥”的发射和在轨运行,解决了嫦娥四号月球背面软着陆和巡视勘察探测任务的中继通信问题,开启了地月平动点应用的新篇章,为未来地月平动点的开发利用奠定了良好的技术基础。
除了航天器中继通信,地月平动点在航天器导航定位、对地观测、科学探测等方面也具有广阔的应用前景。本文结合国内外研究情况,对地月平动点的潜在应用领域进行了分析,并提出了一些具体的应用方案设想,梳理了地月平动点应用需要解决的关键技术,提出了尽快研制一颗运行于地月L4或L5三角平动点的技术试验星,推动基于地月L3、L4、L5三点、覆盖地球的实时观测和态势感知系统建设的未来发展建议。
1 地月平动点及其轨道特点
平动点上的航天器受到两个天体引力的合力,恰好等于它绕两个天体系统质心转动需要的向心力,航天器在这些点上,与两个天体之间的相对位置始终保持不变。在由“大质量天体—小质量天体—航天器”组成的圆型限制性三体问题中,共存在5个平动点,其中3个位于两天体的连线上,称为共线平动点(Collinear Points),包括L1、L2和L3三点;另外2个分别和两天体构成等边三角形,称为三角平动点(Triangular Points),记为L4和L5两点。
在地球附近有7个平动点,包括地月系统的5个平动点以及日地系统2个共线平动点L1和L2,如图1所示。

图1 近地平动点分布Fig.1 Libration points in the vicinity of earth
平动点因其特殊的空间位置,能够自然维持与两个天体的相对几何构型,运行于平动点附近轨道上的航天器也可以保持与两个天体系统几何构型基本不变而只需消耗少量的推进剂。地月系统的5个平动点是离地球和月球最近的平动点,地月平动点轨道具有其它轨道所不具备的特点,是地月空间非常宝贵的资源,应用潜力很大。
在地月平动点轨道上的航天器同时存在两类运动轨道:一是绕地球运行的公转轨道(与月球绕地球的轨道周期相同);二是绕平动点的运行轨道。地月平动点距地球的平均距离为38万千米,其公转轨道周期平均27.3天。与月球轨道类似,地月平动点公转轨道面与赤道面存在一个18.3°~28.6°的震荡倾角。地月平动点相对月球是静止的,而相对于地球,存在一个由地球自转引起的相对速度。地月平动点的公转轨道如图2所示。
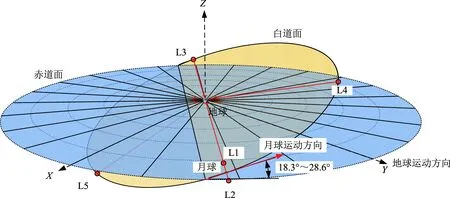
图2 地月平动点公转轨道特点Fig.2 Characteristic of the orbit that libration points run along earth
在平动点附近存在着大量的周期和拟周期轨道,不同的轨道具有不同的特性。地月平动点附近主要的轨道类型如图3所示,其中Lyapunov轨道和Halo轨道是周期轨道,Lissajous轨道和拟Halo轨道是拟周期轨道。这些轨道通常是不稳定的,但航天器通过维持控制可以长期运行在这些轨道上,轨道维持控制的推进剂消耗量很小。

图3 平动点附近的轨道类型Fig.3 Orbit types around libration point
2 地月平动点的应用领域和方案设想
2.1 中继通信
由于月球背面始终无法与地球相见,而地月L2点附近轨道上的航天器是唯一可以同时对地球和月球背面可见的位置,此航天器可实现地面站与月球背面探测器的连续中继通信。虽然环月轨道用于月球中继通信与导航方面,具有距离月面近等优点,但是其运动特点决定单颗卫星无法实现对月球背面区域的连续覆盖。
早在1966年,美国的Farquhar就提出了地月L2点Halo轨道的概念和在这一轨道上放一颗中继卫星对月球背面着陆的探测器提供中继通信的想法[8],如图4所示。近年来,美国和欧洲等多个国家和地区也论证提出了多个月球背面着陆探测任务[9-11],其中的中继通信卫星大都采用了绕地月L2点运行的轨道。

图4 地月L2点Halo轨道上的中继卫星与 月球背面通信构想图Fig.4 Communication between the lunar farside and the relay satellite in earth-moon L2 halo orbit
我国的嫦娥四号任务首先将在地月平动点轨道上实现中继通信的想法变成了现实[12]。为解决嫦娥四号着陆器和巡视器在月球背面的中继通信问题,专门研制了一颗中继通信小卫星——“鹊桥”[13],运行在绕地月L2平动点的Halo轨道上,如图5所示。
2018年5月21日,嫦娥四号中继星成功发射,6月14日,经过5次精准的轨道控制后,进入到绕地月L2点的Halo轨道,至今,已在轨稳定运行超过1年,为嫦娥四号任务的圆满成功提供了稳定可靠的中继通信保障。

图5 嫦娥四号中继星在轨运行示意图Fig.5 On-orbit operation general view of relay satellite for Chang’e-4 mission
2.2 自主导航定位
对于月球正面的探测器而言,有多种导航方式可用,包括利用地面系统和地球轨道GNSS系统的信号来进行导航定位,但定位精度和覆盖性能受限,并且无法实现对月球背面探测器的导航定位,利用平动点引力场非对称的自主导航——行星际联合自主导航(LiAISON)技术提供了一种有效的解决方案[14]。
LiAISON导航技术基于平动点独特的动力学特性,系统简单,仅利用星间测距或测速方式,即可实现地月平动点轨道上的导航卫星与用户卫星的联合自主定轨,如图6所示。采用该种导航技术,只需要一颗运行在地月平动点轨道上的导航卫星,通过星间测量信息,就能够实现环月探测器的定轨、月面探测器(特别是月球背面探测器)的定位、地球轨道卫星(特别是高轨卫星)的定轨以及地月平动点轨道卫星的自主定轨。以月球背面探测器的定位为例,仿真结果表明,对月球背面探测器的定位精度可达到百米内,如果再辅以地面深空测控网,定位精度有望达到10 m内,能够满足月球探测任务的基本需求。
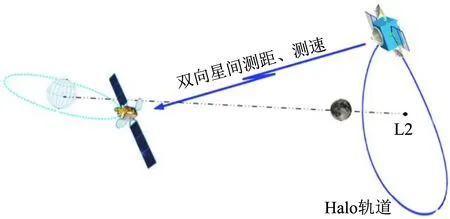
图6 基于L2点Halo轨道的LiAISON导航示意图Fig.6 LiAISON navigation scheme based on earth-moon L2 halo orbit
2.3 对地遥感和态势感知
地月L3、L4、L5点呈120°角均布地球周围,与地球静止轨道(GEO)相比,地月L3、L4、L5点轨道上的航天器能够以较小的视场角实现对地球的覆盖,如图7所示,并且与GEO轨道相比,轨道进入的代价相当甚至略小,轨道维持的代价远小于GEO轨道南北位置保持的代价。因此在对地观测方面也有重要的应用价值,气象等大尺度对地观测是未来可应用的方向,还可以开展地表热异常监测,全球能量平衡观测等对地观测任务。
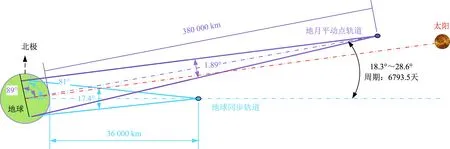
图7 地月L3、L4、L5点对地覆盖特性Fig.7 Earth coverage characteristics of earth-moon L3,L4,L5
地月空间的态势感知也是一个重要的应用方向,图8为本文提出的在地月L3、L4、L5点上建立全球遥感和态势感知系统的示意图,该系统能够实时覆盖整个地球及地球轨道的航天器,可以作为目前地球轨道系统的补充和增强,3颗卫星之间还可以通过星间测距,采用LiAISON导航方法能够实现系统的长期自主运行。
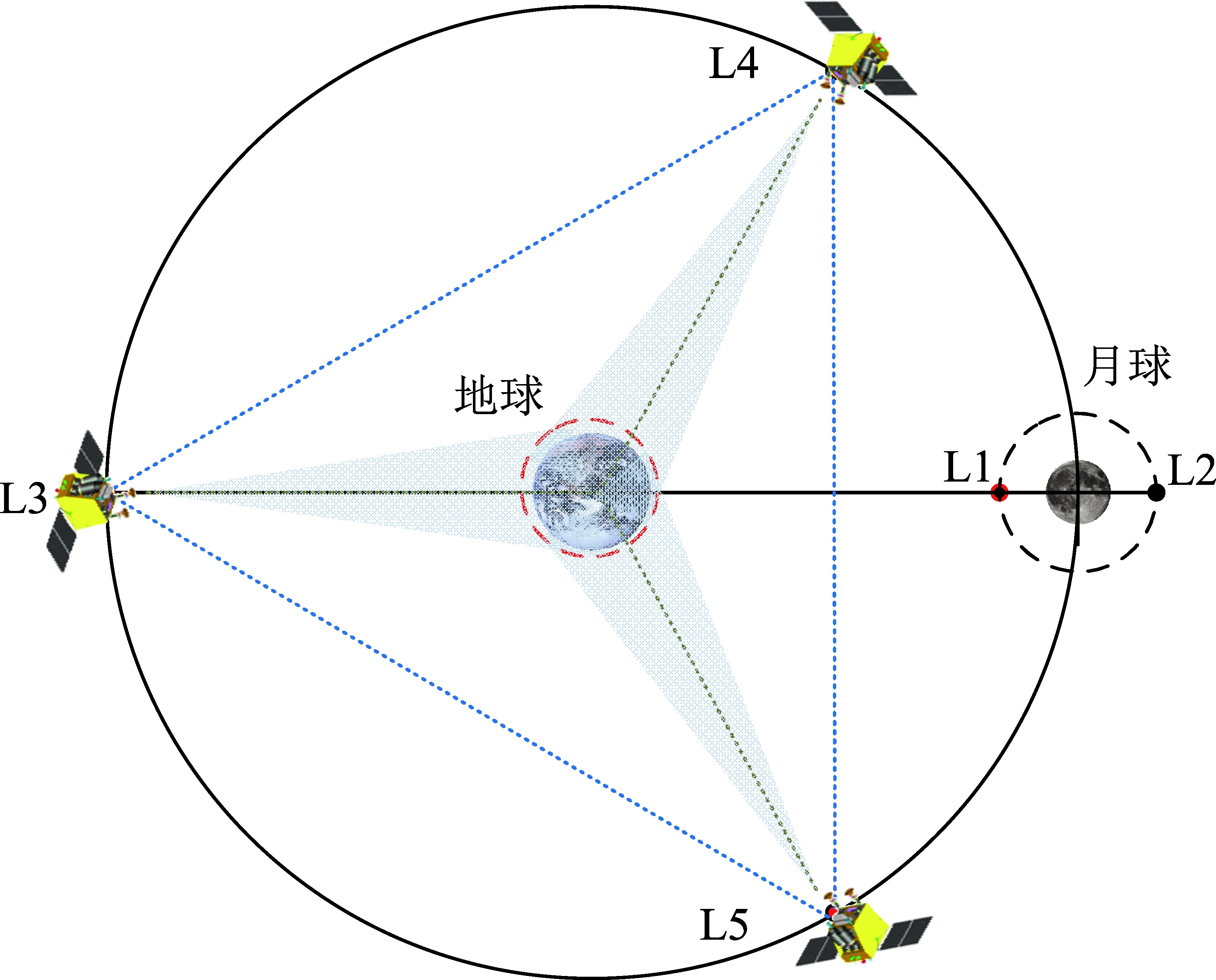
图8 基于L3、L4、L5点的对地观测系统示意图Fig.8 Earth observation system based on earth-moon L3,L4,L5
2.4 空间科学与空间探测
甚长基线(VLBI)是当前各种天文观测手段中空间分辨率较高的观测技术,由于地月平动点间距离远(L3、L4、L5之间的距离是66万千米),可以进行VLBI观测应用[15]。地月L3、L4、L5是布设空间射电望远镜的理想选择,能够同时实现三星之间以及与地面之间的干涉测量,如图9所示。该空间VLBI系统的测量精度高,还能接收到比地面VLBI更多的宇宙信息,具有重要的科学价值。
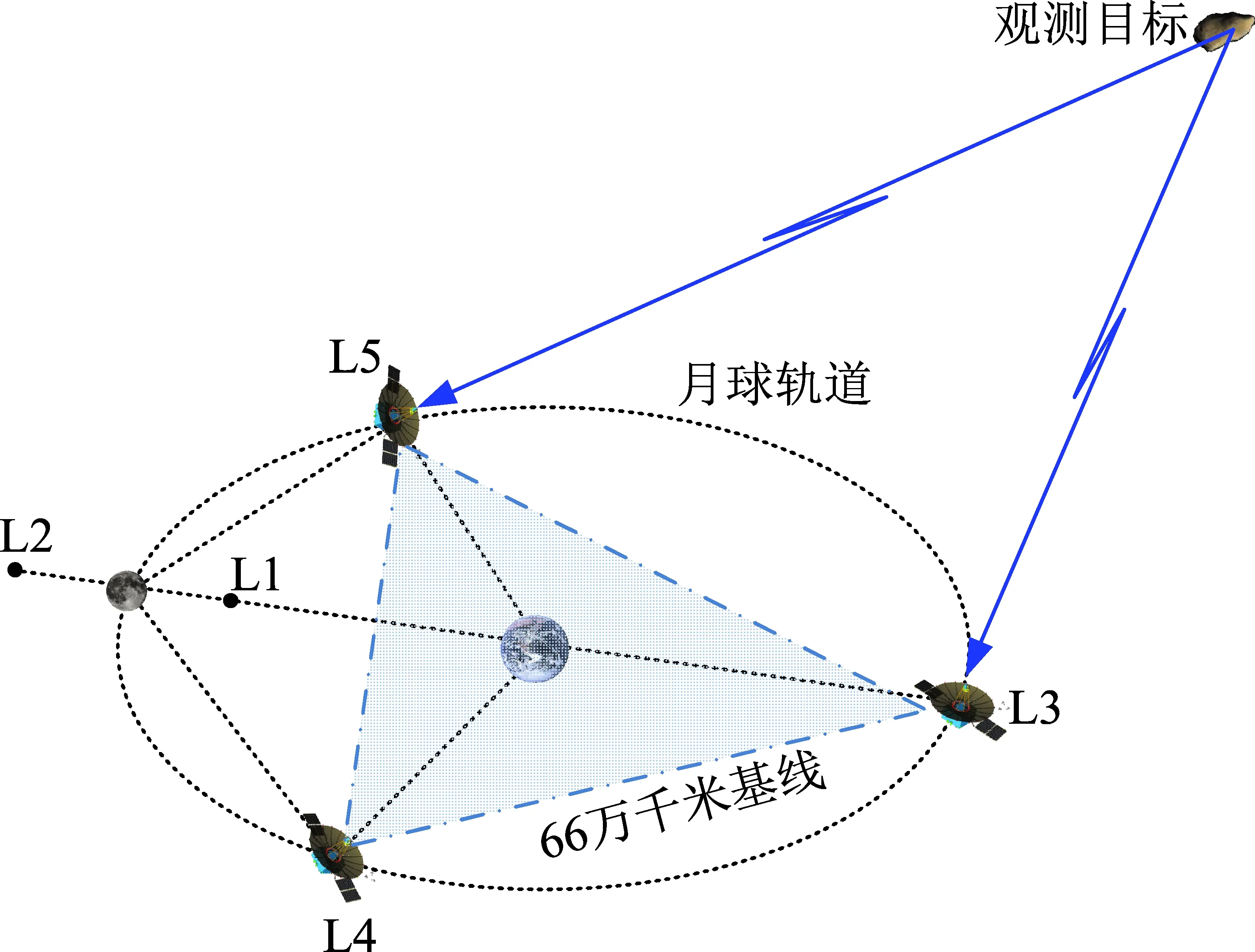
图9 空间VLBI系统示意图Fig.9 Space based VLBI system
利用地月平动点还可以实现地球掩星探测的应用,根据初步分析结果,提出的基于地月L1和L3点轨道上的8星星座方案可实现每天约20万次的掩星事件,具有较高的探测效率,如图10所示。
太阳-木星系统的L4、L5点,存在特洛伊小行星带。根据一些科学家的推测,地月空间的L4、L5点也有一些小的颗粒/尘埃云,称为Kordylewski云,但是否存在一直有争议。本文提出了研制一颗小卫星在地月L4或L5点进行颗粒/尘埃探测的方案设想。由于L4/L5点远离地球和月球,目前其附近也没有其它航天器运行,还是低频射电观测的一个理想场所,未来也可以考虑这方面的应用。
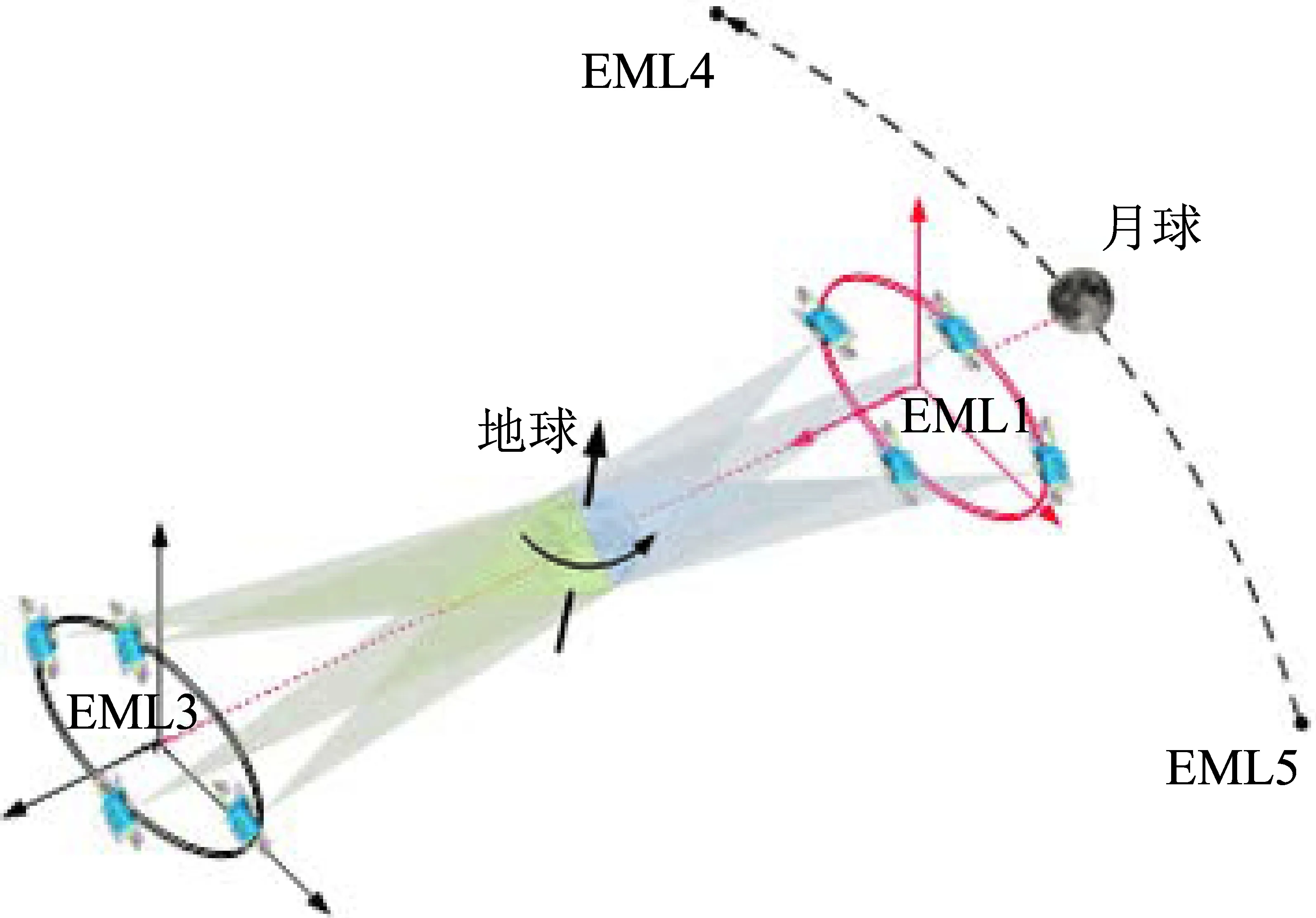
图10 基于地月平动点的掩星探测概念Fig.10 Earth occultation detection system concept based on earth-moon L1 and L3
2.5 载人空间站
在月球附近建立空间站能够衔接近地载人活动与深空载人探索,有效支持载人登月任务,作为任务的通信和监控中心,提供中继通信、导航支持,指挥、控制并监视月面任务。同时可作为月面任务的后勤补给站,提供维护保障服务。
采用地月平动点轨道便于从空间站往返月球和地球,没有严格的窗口限制。近年来,美国月球空间站的论证主要是围绕地月平动点轨道进行的,包括地月L1点和L2点轨道。2017年3月,NASA提出了“深空之门”(Deep Space Gateway)和“深空运输站”(Deep Space Transport)计划。“深空之门”为有人照料地月空间站,用作未来“深空运输站”的中转补给站,并考虑作为未来机器人和载人月面任务的中转基地。“深空之门”选择了月球附近的近直线晕轨道(NRHO),该轨道也属于地月平动点轨道[16]。
2.6 通往深空的跳板
太阳系的行星和卫星间的平动点Halo轨道及其衍生的不变流形在深空探测任务中备受青睐,这些轨道构成了一个复杂而蜿蜒的“交通网”通道,称为“行星际高速公路”(Interplanetary Superhighway)[17],如图11所示,通过该低能转移通道,航天器只需要较小的推进剂消耗,就成实现深空探测轨道转移任务。

图11 行星际高速公路示意图Fig.11 Interplanetary superhighway
地月L1和L2点是向行星际空间转移的低能通道入口,可以作为行星际高速公路的起点,方便地到达日地L1和L2点以及火星、木星等深空探测目标,图12为美国的Farquer等提出的利用L2点轨道上的空间中转站来实现月球、小行星、火星等探测任务的想法[18]。我国未来也可以考虑在地月L1或L2点建立中转站,支持无人和载人月球及深空探测任务。

图12 基于地月L2点开展深空探测示意图Fig.12 Utilization of earth-moon L2 libration points for human deep space exploration
3 地月平动点应用的技术挑战和基础
作为人类可以利用的重要空间资源,基于地月平动点轨道来构建新型航天器系统,不仅能够支持月球探测和深空探测任务,还能够实现对地球轨道航天器系统的补充和增强,甚至能够实现一些在地球轨道和其它轨道上无法实现的应用效能。
地月平动点的应用也面临一些技术挑战,主要包括:适合远距离条件下工作的新型有效载荷技术、地月平动点轨道设计和轨道转移技术、远距离高速率数据传输技术、超稳定姿态控制技术、航天器自主定轨与自主运行管理技术,高效推进技术等。
地月平动点应用的特点是空间大尺度,大尺度带来了良好的对地、对月覆盖特性,但也带来了工程实现上的挑战,特别是远距离带来的探测能量衰减和信号衰减问题。随着技术进步,这些问题正逐步得到解决,例如“鹊桥”上的4.2 m大口径伞状抛物面天线质量不到50 kg,为远距离通信提供了可行的工程实现途径。激光通信技术的发展和应用也为远距离、高码速率的数据传输提供了有效的手段。另外,航天器有效载荷能力不断增强,一些新型载荷也具备了在远距离下的探测能力。未来大尺寸、轻量化空间结构机构及在轨服务与在轨建造技术的发展,能够为地月平动点的轨道航天器的发展提供强有力的技术支撑。
与日地平动点相比,地月平动点由于受到太阳引力的干扰以及月球轨道偏心率的影响,其动力学特性比较复杂,轨道设计和维持控制难度更大。经过多年的研究,在地月平动点轨道的设计和维持策略、转移轨道设计与控制等多方面已有良好的技术基础,通过嫦娥五号试验飞行器、“鹊桥”的地月L2点轨道设计与在轨运行实践,在共线平动点轨道方面已经积累了丰富的经验,后续重点要解决地月L4、L5两个三角平动点的轨道设计问题。
近年来,在高效电推进、微牛级推进及超高稳定度姿态控制、高精度轨道测量与控制等相关技术方面也取得了实质性突破,能够有效支持地月平动点轨道航天器的发展。
4 发展建议
与地球轨道相比,利用地月平动点轨道构建的航天器系统覆盖面广、自主性强、安全性好,具有重要的应用价值,能够产生显著的应用效益。国内外对基于地月平动点轨道的航天器系统开展的研究论证和“鹊桥”的在轨应用结果表明,地月平动点轨道具有很大的应用潜力,本文也提出了一些具体的应用方案设想。
目前地月L1和L2点轨道已有航天器在轨运行经验,地月L3、L4和L5点轨道还没有人类航天器涉足,尚处于应用空白,应抢占先机,加快利用,尽早建立起相关系统。特别是地月L4、L5点属于三角平动点,其轨道特性和空间环境与地月L1/L2点有所不同,建议尽快研制一颗运行于地月L4点或L5点轨道的技术试验星,结合尘埃云观测等应用,对三角平动点的空间环境、轨道动力学特性、应用效能进行验证,积累经验,为未来基于地月L3、L4、L5点轨道、覆盖地球的实时观测和态势感知系统的发展打好基础。
地月平动点轨道的应用刚刚起步,应充分发挥地月平动点轨道的特点,进一步深化运行在地月平动点轨道的航天器任务的研究论证,提出创新性应用,解决目前地球轨道航天器系统无法解决的问题。同时加快发展适合远距离条件下工作的新型有效载荷,为后续的工程应用奠定坚实的技术基础。通过地月平动点轨道航天器系统的发展,不断解决新问题,形成新能力,推动我国的航天器应用迈向新的高度。