分布式仿真环境下空空通信畅通区三维空间数据生成方法*
2019-07-30赵元,齐锋,何俊,张坤
赵 元,齐 锋,何 俊,张 坤
(国防科技大学电子对抗学院, 合肥 230037)
0 引言
信息化条件下的现代空战中,空空通信是空中平台之间指挥引导和作战协同的重要途径。预警机对作战编队进行态势通报、指挥控制以及作战编队内部之间的作战协同都离不开空空通信。通信畅通区[1]是衡量通信效能的主要战术指标,它是在通信发射机位置已知的条件下,能够与其保持通信畅通的接收机位置形成的区域。在态势上对通信畅通区进行可视化,可直观形象的展示通信装备的作战能力,对通信一方决策编队内部队形以及预警机与编队之间的位置关系具有支撑作用,同时对于通信干扰一方,也能够有效支持其干扰力量的配置、数量需求以及干扰时机等作战决策。
在和平时期,通过模拟的手段,构建一个贴近实战的虚拟战场环境,能给指挥员直观、形象的战场描述,为快速抢占电子战先机,把握战场态势,做出准确判断、科学决策意义重大[2]。当前模拟训练系统大多采用基于HLA仿真架构[3]的分布式仿真环境,在这个环境中,一般由进行作战行动模拟的多个模型成员和二三维态势成员组成。模型成员负责解算通信畅通区的数据,由态势成员完成通信畅通区的可视化,两个成员之间通过RTI(run-time infrastructure)[4]进行数据交换。传统方法中,当数据交互采用全三维空间数据时,每部电台的数据量超过100 Kbit[5],在大规模作战仿真中(仿真实体成百上千),对网络带宽要求高,很难满足实时性要求。
1 空空通信畅通区计算模型
1.1 无干扰下通信畅通区计算模型
自然通信畅通区是指以通信发射机为中心,最大通信距离为半径的圆[6]。根据空空通信的特点及通信方程,计算最大通信距离时,考虑发射机和接收机使用鞭状天线,信号以自由空间波传播,可得Rmax:
(1)
式中:Pt、Gt(θ,φ)为通信发射机发射功率和增益;Pr(min)为通信接收机接收天线端的最小接收功率。
1.2 干扰条件下通信畅通区计算模型
依据文献[7]中给出的二维空间通信干扰方程,考虑三维空间中俯仰角的影响,可将方程拓展到三维空间中如下式:
(2)
式中:Pj、Gj为干扰机输出功率和发射增益;φt(Rt)为通信线路传播衰耗;φj(Rj)为干扰线路传播衰耗;qrt为通信接收机天线在发射机方向上的接收增益;qrj(θ)为通信接收机天线在干扰机方向上的接收增益;γj为干扰的极化损失;Ka为压制系数;Δfj为干扰带宽,其余量意义同上。

(3)

(4)


图1 通信畅通区边界点三维空间关系示意图
代入式(4)中得:
a2(x2+y2+z2)=(d-x)2+y2+z2
(5)
设Rt的长度为r,则三维空间极坐标下的通信干扰方程表示为:
(a2-1)r2+2drcosφcosθ-d2=0
(6)
可知,在确定俯仰角和方位角时可获得三维空间干扰条件下通信畅通区边界点通信距离。
1.3 计算模型分解
增益系数是衡量天线能量转换效率和方向特性的参数,它是方向系数与天线效率的乘积。即
G=ηAD
(7)
式中:ηA是天线效率,D是方向系数。
三维空间中,在任一方向的方向系数D(θ,φ),与天线的最大方向系数Dmax的关系为:
D(θ,φ)=DmaxF2(θ,φ)
(8)
式中:F(θ,φ)为天线的归一化方向函数。
代入式(2)可得:
(9)
根据上式可知有无干扰条件通信设备在垂直面上某一方位(方位角θ相同)的通信距离等于二维最大通信距离与天线归一化方向函数的乘积:
Ry(θ,φ)=Rmax(θ)F(θ,φ)
(10)
式中:Ry(θ,φ)为在方位角θ和俯仰角为φ的通信距离;Rmax(θ)为在方位角θ上的最大通信距离。
2 空空通信畅通区数据采样
根据上述的计算过程,采样过程为:根据接收到的数据,按照协议解析出干扰前后圆心位置、半径和干扰强度,计算得到水平面上各个方位的通信距离。进而进行空间采样,即根据各个方位上的最大通信距离,加入天线归一化方向函数,可得到全三维空间的数据。
2.1 水平数据采样
情形1干扰后的通信畅通区落入到自然通信区内部。设未受干扰时的圆心T到通信畅通区边界的距离为M,根据余弦定理:
(11)
式中:D为干扰前后圆心的偏移距离;θ为水平面方位角;r为受干扰后通信畅通区的半径。
情形2干扰后的通信畅通区有部分在自然通信区外部,此时通信畅通区为两个圆形区域的交集,如图中阴影部分所示。同理,在三角形中根据余弦定理:
(12)
在自然通信区外部的部分需要舍弃,这部分求解出的M>R,只要令M=R,即可求得阴影部分水平面的通信距离。
(13)
式中:R为受干扰后通信畅通区的半径。其余量意义同上。
将方位角θ从0°到360°,以3°为间隔采样,两种强干扰情形的采样示意图如图3。

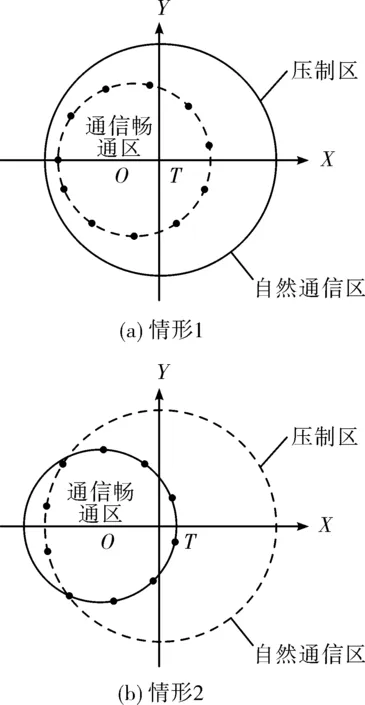
图3 强干扰下通信畅通区两种采样情形

图4 弱干扰下通信畅通区情形1

(14)
当切点在自然通信区外(即有一个交点)的时候可将通信畅通区分成两部分求解,按方位角分为:[-θ1,θ1],[θ1,2π-θ1]。
(15)
采样步骤同强干扰,采样示意图如图5。
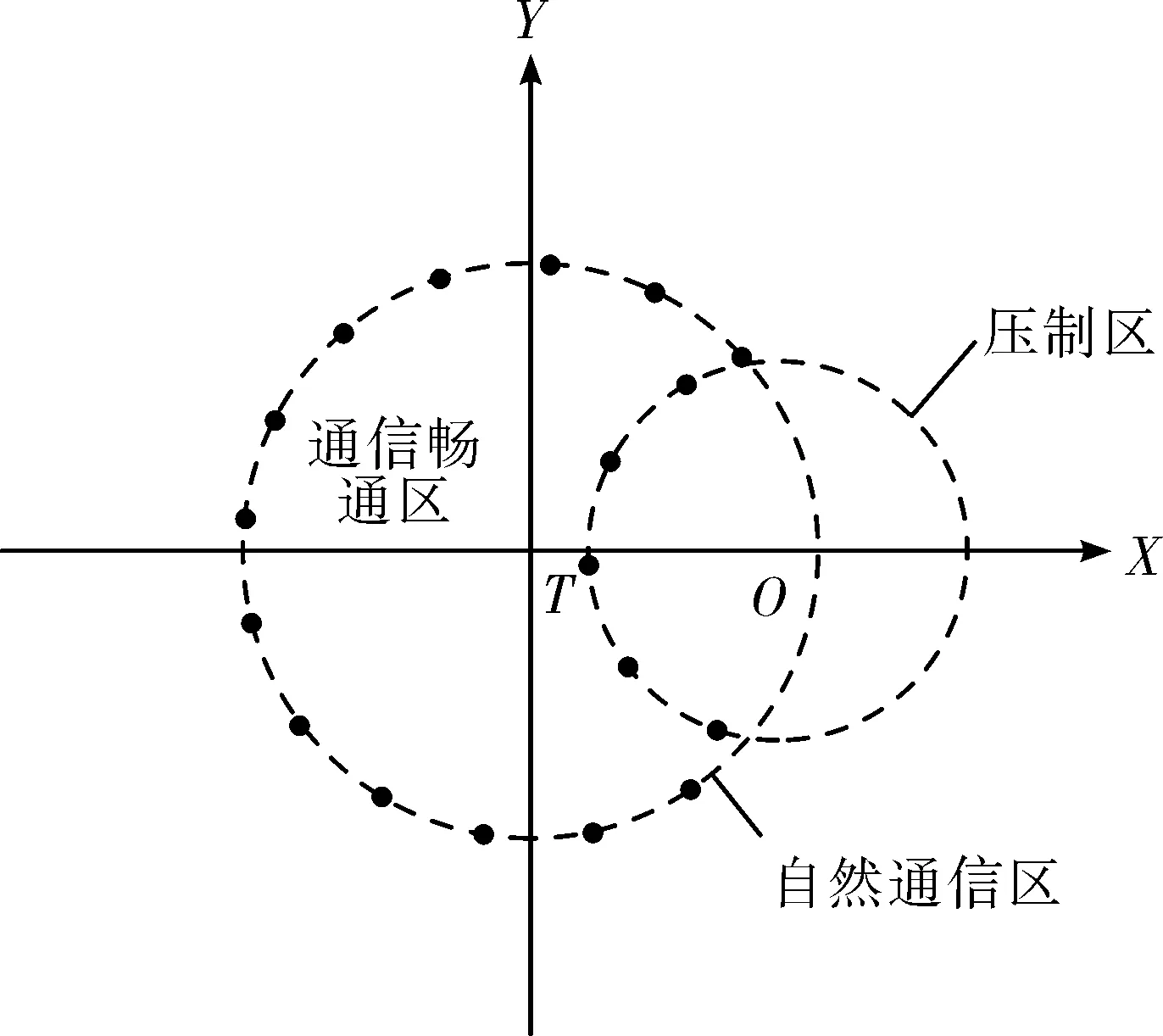
图5 弱干扰下通信畅通区采样情形
2.2 全三维数据采样
在获得二维平面采样数据的基础上,读取态势成员本地存储的天线归一化方向函数,顺序改变俯仰角φ的值,由式(9)可得三维空间采样数据。目前空空通信无论是数据链,还是语音通信,通信方式主要采用超短波通信,通信天线多为各向同性的鞭状天线。根据文献[9]鞭状天线的归一化方向函数如表1。
3 实例仿真
实例背景:红军*型战斗机按照作战计划,沿指定航路对蓝军机场进行远程打击,蓝军**型预警机担负空中预警及指挥引导任务,当发现有敌方目标进入其防空责任区后,将通过机载数据链(超短波通信),指挥引导编队内*型战斗机进行空中拦截。红军为掩护其飞机突防,在飞机航路上顺次部署*部预警机数据链干扰机,各干扰机之间部署距离在**km,按照行动计划,间隔*min依次开机干扰。在分布式仿真环境中,模型成员负责作战行动的模拟、建立对抗关系,并通过模型解算获得二维通信畅通区域,三维态势显示成员利用文中提出的方法,分别对接收到的无干扰,弱干扰和强干扰3种情况下的二维通信畅通区进行了数据采样和三维空间数据生成,并在三维地理信息系统上可视化,获得了实时、直观的通信畅通区三维动态图,如图6~图8。
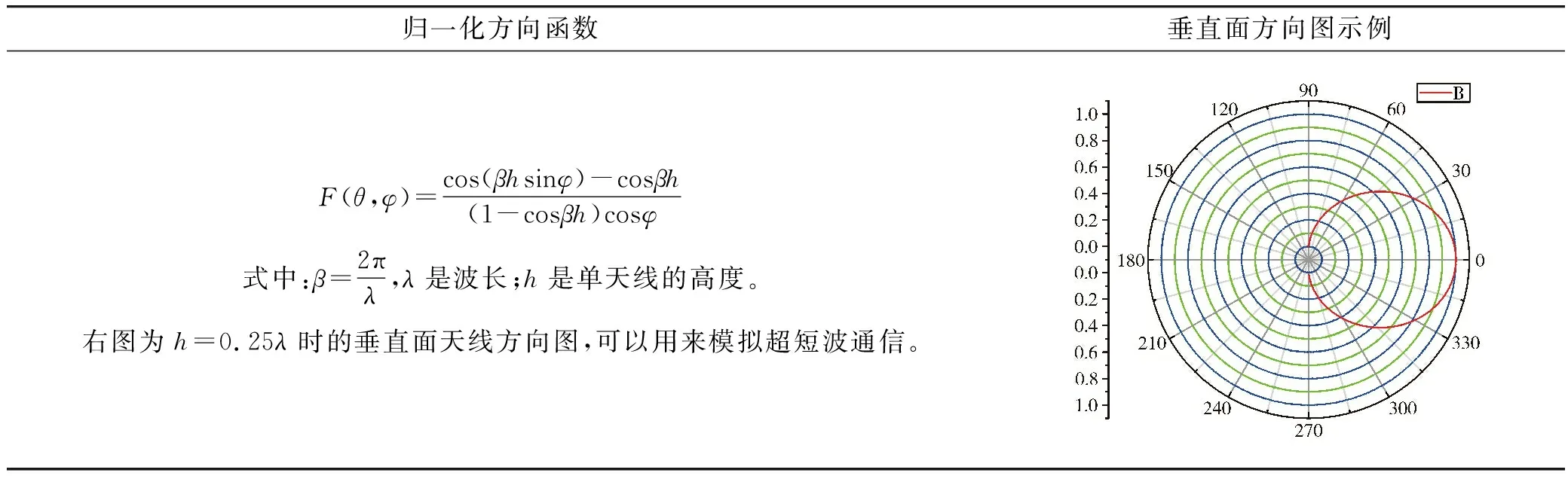
表1 鞭状天线归一化方向函数及仿真图
图6是仿真时间为八时十四分时的态势图(仿真开始时间为八时零分),此时红方飞机已飞入蓝方防空责任区,蓝方预警机引导其作战飞机进行拦截,红方飞行航路上部署的第一部干扰机由于距离预警机过远,干扰无效,此时预警机无干扰下的通信畅通区半径达450 km,能够正常引导其飞机出航。
图7是仿真时间为八时十九分时的态势图,红方飞机航路上部署的3部干扰机工作,由于干扰功率较小、距离过远,只对预警机指挥引导通信造成弱干扰,红方飞机航路方向预警机通信距离被压缩至196 km,但仍能够正常引导飞机。
图8是仿真时间为八时三十二分时的态势图,5部干扰机全部工作,干扰合成功率较大,对预警机指挥引导通信造成强干扰,此时正面通信距离压缩至130 km,破坏预警机对战斗机的引导作用,飞机失去引导。
4 结束语
通过对由近百部电台组成的通信网仿真发现,利用传统的方法进行数据交互时,仅三维通信畅通区数据量每步长约10 Mbit,在较慢的仿真速度(3 s/步)时能够勉强随着作战进程实时更新。而使用文中提出的方法,每步长约7 Kbit,在较快的仿真速度(0.01 s/步)时仍能很好的展示三维通信畅通区的变化过程,对其进行定量分析,能够有效支持指挥员作战过程中的实时指挥和对战前作战筹划的评估。

图7 弱干扰条件下指挥引导通信图

图8 强干扰条件下指挥引导通信图
