基于脉冲推力/气动力复合控制的高速动能导弹控制方法研究*
2019-07-30刘钧圣谭毅伦
邹 勇,刘钧圣,马 骏,谭毅伦
(1 国防科技大学空天科学学院, 长沙 410073; 2 西安现代控制技术研究所, 西安 710065)
0 引言
高速动能导弹是一种具备高速动能碰撞杀伤能力的现代导弹武器系统,其穿甲战斗部在导弹助推发动机作用下短时间内达到超高速(约5倍音速以上),基本不给敌方目标反应时间,可以应对目前的各类装甲和地面目标。因此,高速动能导弹武器系统将会在未来的高技术战争中得到广泛应用。为了提高制导响应和精度,高速动能导弹通常采用直接力复合控制的工作模式,复合控制系统的设计是高速动能导弹的关键技术。
国内外目前在高速动能导弹和旋转导弹方面已经有了很多研究,文献[1]中作者对气动力/推力矢量复合控制空空导弹的姿态控制技术进行了研究;文献[2]中对采用自旋稳定工作方式导弹的复合控制方法进行了研究,提出了基于指令分解的控制器设
计方法。高峰, 唐胜景等在文献[3]中对气动/推力矢量飞行器的复合控制分配策略进行了研究。文献[4]研究了基于最优舵面超前角度补偿和输出反馈动态的解耦控制方法。文献[5]中对采用脉冲发动机作为执行机构的导弹原理进行了分析,建立了脉冲控制模型。文献[6]针对直/气复合控制导弹姿态控制系统的特点,提出将非线性模型预测方法与自抗扰控制方法结合的姿态控制策略。
文中针对基于脉冲推力/气动力复合控制的高速动能导弹控制方法展开研究。首先建立了滚转高速动能导弹的数学模型,然后对设计的脉冲推力/气动力复合控制控制系统进行了描述;设计了脉冲发动机点火策略;进而以某型高速动能导弹的设计参数为例,通过仿真算例对设计的脉冲推力/气动力复合控制方法的性能进行了验证和分析;最后给出了结论。
1 导弹数学模型描述
1.1 坐标系定义
为便于分析滚转导弹运动,建立准弹体坐标系和准速度坐标系。
准弹体坐标系O4x4y4z4:坐标原点O4位于导弹弹体质心;O4x4沿弹体纵轴,指向弹体头部为正;O4y4轴位于弹体纵轴的铅垂面内垂直于O4x4方向,向上为正。O4z4垂直于其它两轴并符合右手定则。
准速度坐标系O5x5y5z5:坐标原点O5取在导弹质心,O5x5与导弹质心的速度矢量重合;O5y5轴位于包含弹体纵轴的铅垂面内,且垂直于O5x5轴;O5z5垂直于其它两轴并符合右手定则。
1.2 导弹动力学/运动学模型
在定义的准弹体系和准速度系下,滚转导弹的运动学模型可以描述为:
(1)
式中:m为导弹质量;Jx4、Jy4、Jz4分别为导弹准弹体系下各轴的转动惯量;P为发动机推力;v为导弹飞行速度;θ和ψv分别为弹道倾角与偏角;ϑ、ψ和γ分别为导弹的俯仰角、偏航角和滚转角;ωx4、ωy4和ωz4分别为准弹体系下导弹的角速度;X、Y、Z分别为阻力、 升力和侧向力;Mx4、My4和Mz4分别为准弹体下的气动力矩,Mcx4、Mcy4和Mcz4分别为准弹体系下的操纵力矩。β、α和γv分别为弹体的侧滑角、攻角和速度倾斜角。
气动力和力矩可表示为:
(2)
(3)
2 脉冲推力/气动力复合控制系统设计
假设高速动能导弹头部安装若干个脉冲发动机,导弹尾部安装一对正常式布局的空气舵机。为了简化地面发射系统结构,高速动能导弹转速采用发射后气动赋旋的方式,因此导弹发射后有一个转速上升直至稳定旋转的过程。对于安装了一对空气舵片的单通道控制旋转导弹来说,初始段转速较慢时,空气舵无法有效提供足够的侧向控制力,导弹的侧向稳定性较差。因此,导弹头部脉冲发动机直接力控制的作用不仅是提高导弹控制响应速度和命中精度,在导弹发射后初始段转速较慢时还能够有效提供侧向控制力,提高导弹侧向稳定性。

图1 复合控制系统工作流程
基于脉冲推力/气动力复合控制系统工作流程如图1所示。完整的复合控制系统工作流程由控制系统、执行机构(空气舵和脉冲发动机)以及导弹和目标运动学组成。控制系统根据地面上传的目标信息和弹上传感器测量的导弹运动信息计算空气舵控制指令以及脉冲发动机点火指令,由空气舵提供的气动力和脉冲发动机提供的脉冲推力共同控制导弹的飞行,直至命中目标。
3 脉冲发动机点火模型
脉冲发动机安装在导弹头部位置,主要用于产生直接脉冲推力,使导弹快速响应控制指令。假设导弹在其头部安装了10圈,每圈16个,共计160个脉冲发动机,单个脉冲发动机的工作时间为Tmc,在工作时间内提供等幅连续的推力,其大小为ND。各脉冲姿态控制器编号定义为:
脉控器行编号Ni:距离弹体头部最近的一圈脉冲发动机定义为第0行,第二圈定义为第1行,以此类推,取值范围:0≤Ni≤9;
脉控器列编号Nj:安装在弹体正上方一排脉冲发动机定义为第0列,按顺时针方向依次为第1,2,…列,取值范围:0≤Nj≤15;
脉控器总编号N:N=16×Ni+Nj,取值范围:0≤N<160。
假设导弹某一时刻俯仰和偏航方向所需控制力分别为Fy和Fz,写成极坐标的形式则有:
(4)
不考虑脉冲发动机的点火延迟,则转速补偿为:
θzs=ωx×Tmc
(5)
θd=θd0-0.5×θzs+180°
(6)
当F>ND时,选择启动最靠近θd的脉冲姿态发动机,就提供与Fy和Fz所对应的直接侧向控制力。
4 数学仿真与验证
现以某型高速导弹的弹体参数和气动数据作为输入对设计的脉冲推力/气动力复合控制方法进行验证和分析。定义气动舵机的最大舵偏角为UMAX,舵效为Cyd,距离导弹头部最近的一圈的脉冲发动机到导弹头部的距离为L0,相邻脉冲发动机在弹体纵轴方向上的距离为Ld,目标距离为6 000 m,初始俯仰和偏航初始扰动均为0.3 rad/s。其它主要仿真参数如表1所示。
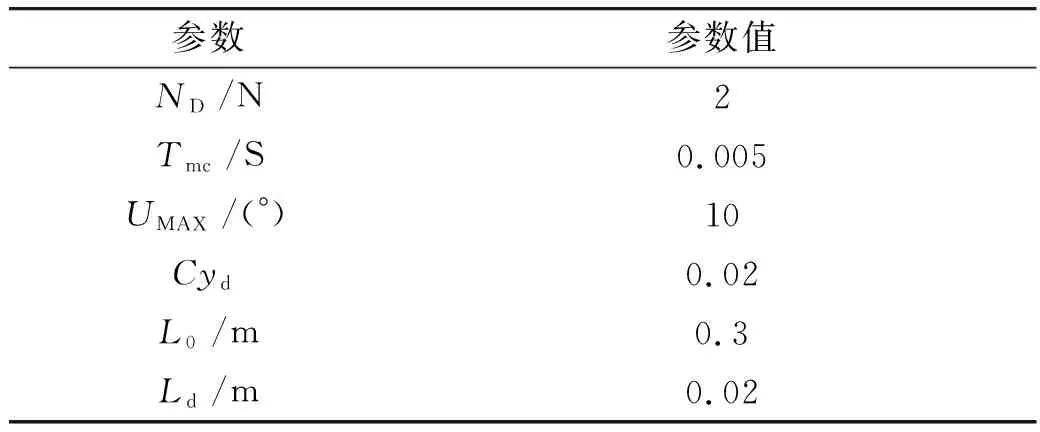
表1 仿真参数
导弹初始段控制方案采用姿态稳定控制,以减小初始发射扰动对导弹姿态的影响。导弹姿态稳定后转入弹道控制回路,控制导弹向目标飞行。在给定参数条件下的仿真结果如图2~图7所示。图2和图3采用复合控制方案与单独采用空气舵控制方案的导弹俯仰角和偏航角随时间变化的曲线。图4和图5采用复合控制方案与单独采用空气舵控制方案的导弹位置时间变化的曲线。导弹在2 s前采用姿态控制,2 s后转入弹道控制。从仿真结果可以看到,相比单独空气舵控制仿真结果,在给定初始扰动条件下,复合控制时导弹的俯仰角和偏航角收敛速度较快,侧向位置偏差较小,更有利于导弹的姿态稳定,向弹道回路控制的过渡过程也更加平稳。
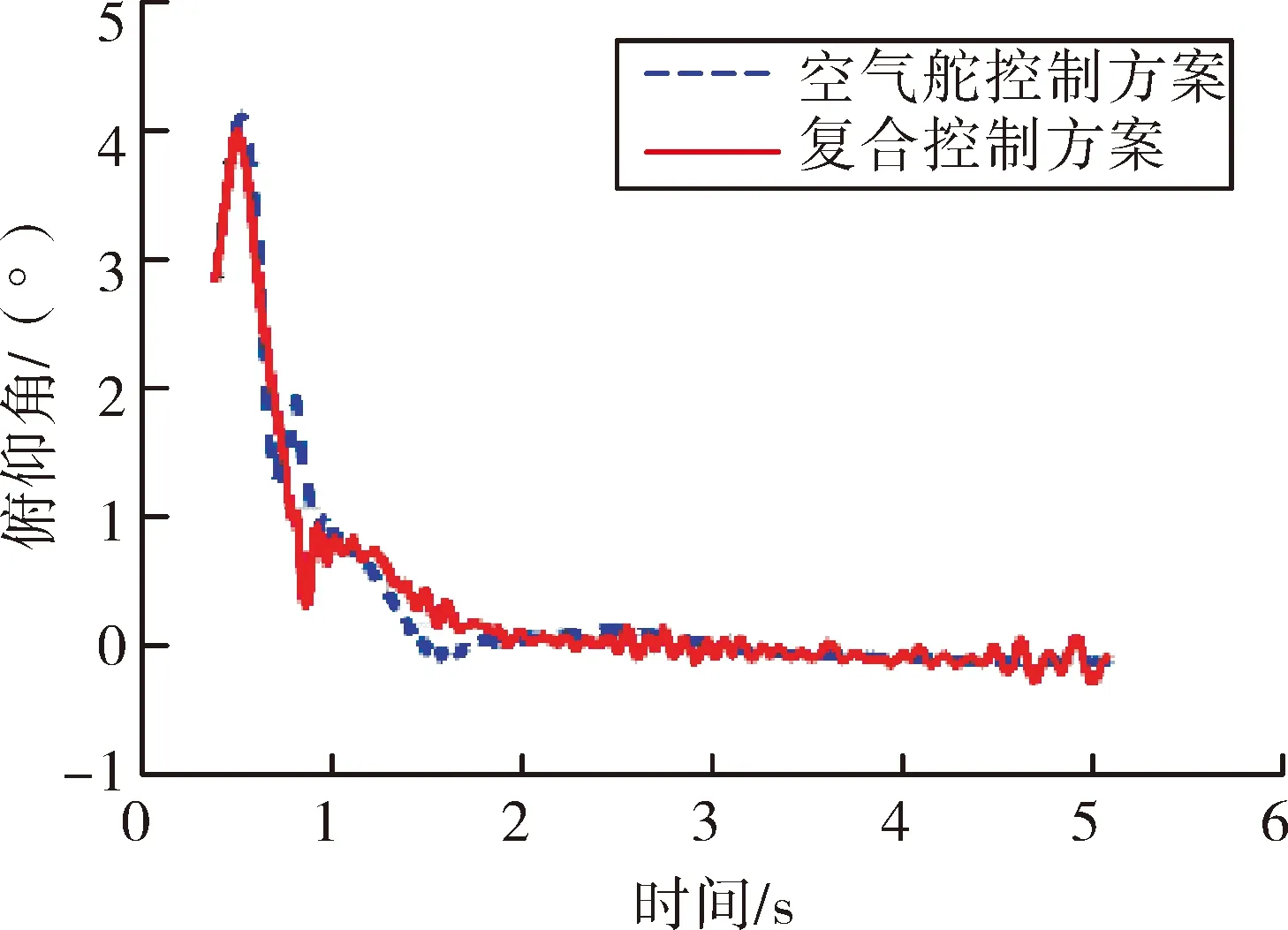
图2 俯仰角随时间变化
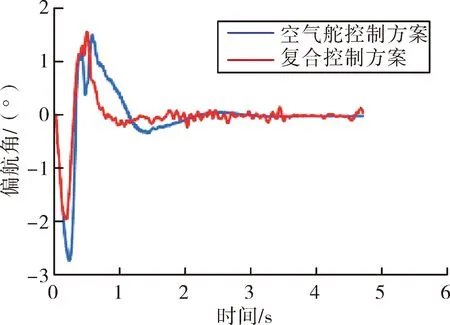
图3 偏航角随时间变化
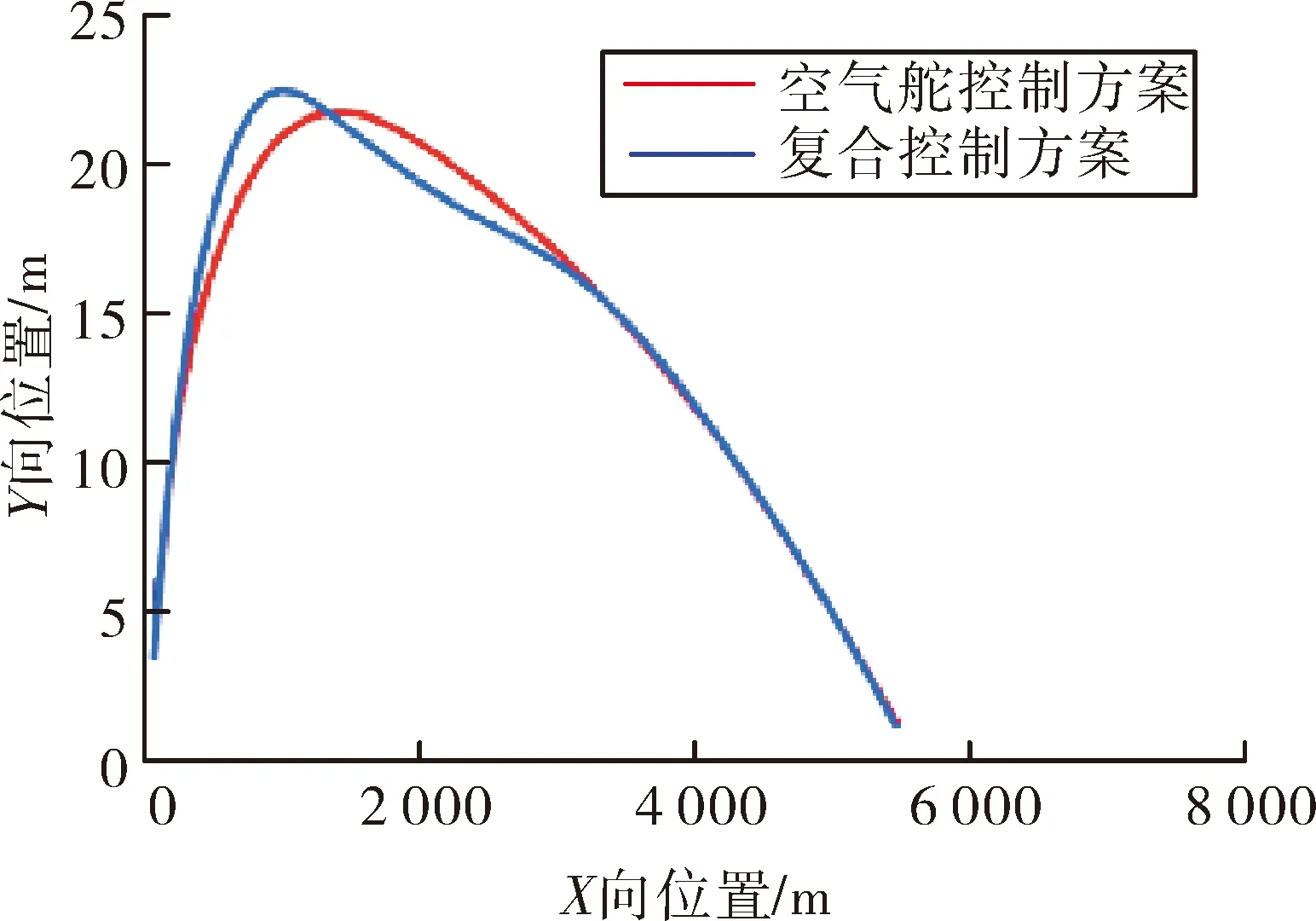
图4 X-Y向位置曲线
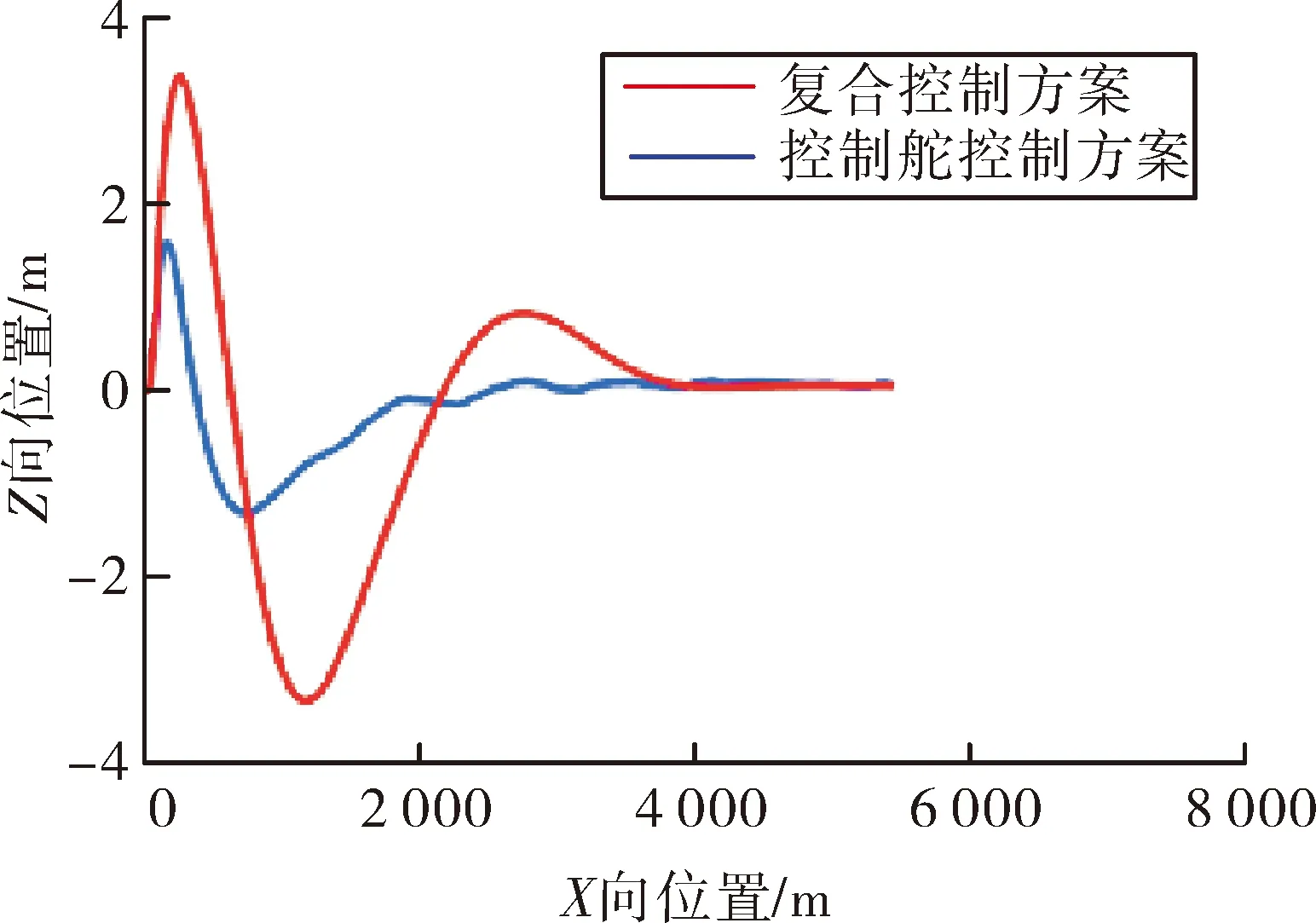
图5 X-Z向位置曲线
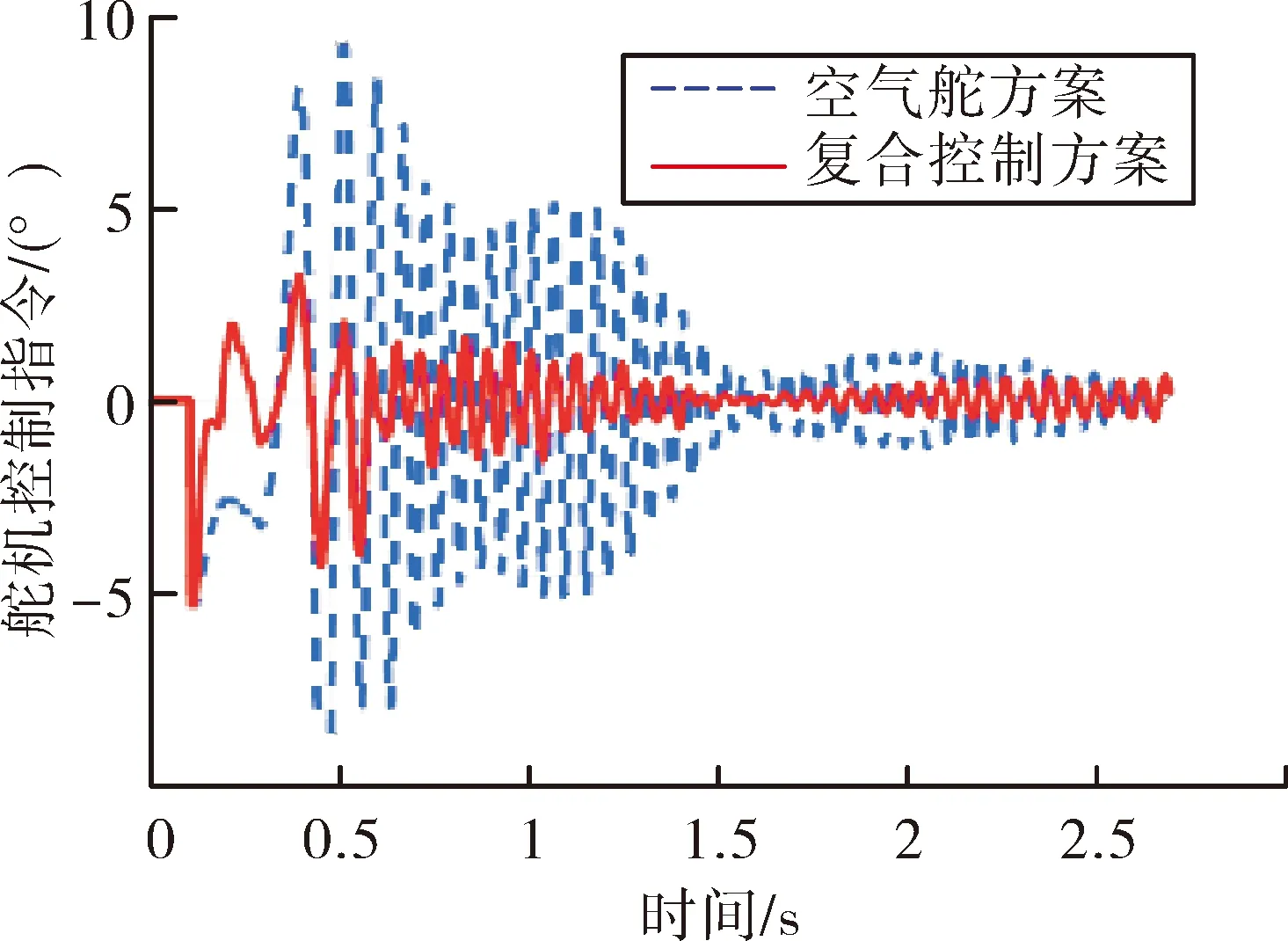
图6 舵机控制指令

图7 弹体系下脉冲控制力
图6和图7为复合控制方案时导弹的空气舵指令和弹体系下脉冲发动机产生的脉冲控制力。从仿真曲线中可以看到,单独空气舵控制时,在初始段姿态稳定控制时所需空气舵指令较大,有满舵的现象出现,而在复合控制方案时,空气舵指令明显减小;脉冲推力发动机在初始姿态稳定段作用明显,需要点火的脉冲发动机数量较多,而在弹道控制段所需点火脉冲发动机数量明显减少。
5 结论
复合控制系统的设计是未来高速动能导弹的关键技术,本文以某型高速动能导弹的研究为背景,设计了基于脉冲推力/气动力复合控制的高速动能导弹控制方案。建立了滚转高速动能导弹数学模型,设计了脉冲发动机点火模型,并通过数学仿真对复合控制方案和单独空气舵控制方案进行了比较。仿真结果表明:对于单通道控制滚转高速动能导弹,复合控制时,存在发射扰动条件下,导弹姿态角收敛速度和侧向稳定性更好;脉冲发动机在发射初始段效果明显,在初始段转速较低时能够提供侧向控制力,保证导弹侧向稳定性。
