基于RBF神经网络的机械臂自适应控制方法
2019-07-252
2
(1.河南科技大学 电气工程学院,河南 洛阳 471023; 2.电力电子装置与系统河南省工程实验室,河南 洛阳 471023)
0 引言
通过模仿人的手臂,机械臂可以实现抓取、移动等功能[1-3]。如今,许多极端环境下的危险工作大多都需要借助机械臂来完成,比如深海勘探、放射性废物处理、太空操作等[4-5]。面对极端的操作环境、严苛的精度要求,机械臂控制系统必须具有良好的稳定性、灵敏的反应速度以及较高的精准度。然而,机械臂是一个高度耦合的多输入和多输出的非线性系统,且存在不确定的时变扰动和内部摩擦等因素,难以对其建立精确的动力学模型,这给机械臂轨迹跟踪控制的实现增加了困难[6-7]。
近年来,学者们对机械臂的轨迹控制进行了一定的研究,提出了一些控制策略和方法,如计算力矩法,PID控制,模糊控制,神经网络控制,自适应控制等[8-12]。在文[13]中,计算力矩法被用于补偿眼内手术机器人的重力项,与PD控制方法相比,它具有良好的跟踪性能。文[14]提出了一种新的参数调整方案,通过与经典整数阶模型进行比较,可以看出自适应控制系统具有更好的轨迹跟踪性能,并且对时变扰动具有较强的鲁棒性。在文[15]中,设计了一种计算力矩法与模糊补偿相结合的自适应控制策略,并将其应用于机械臂的控制系统中。利用李亚普诺夫理论分析了该自适应模糊补偿控制系统的稳定性,并利用仿真验证了其有效性。文[16]采用径向基神经网络(RBFNN)自适应滑模控制结构来调整机械臂的动态变化。使机械臂控制系统不受时变参数的影响,确保其跟踪误差趋向于零。文[17]提出了一种新的GA-RBFNN闭环自适应控制系统。针对机械臂系统存在外部干扰,该系统采用RBFNN对其进行逼近与补偿,确保机械臂控制系统能够在较短时间内达到稳定状态。
从上述文献中提出的控制方法可以看出,对于机械臂的理想动力学模型,由计算力矩法设计的轨迹跟踪控制器具有良好的控制效果。但是机械臂通常存在内摩擦和时变扰动等不确定性因素,计算力矩控制器很难获得期望的跟踪效果。采用模糊控制器或者神经网络控制器可以对时变扰动和内部摩擦进行逼近与补偿以确保机械臂控制系统的稳定性。然而,模糊控制器的设计较为复杂,特别是难以确定合适的隶属函数和模糊规则。神经网络具有自学习能力,能够对任意非线性及线性函数进行逼近补偿,且对数据映射具有非常好的适应能力,更适合用于控制器设计。虽然已有文献尝试利用神经网络对机械臂的内摩擦和时变扰动进行逼近补偿,也得到了良好的控制效果,其跟踪误差基本控制在±0.1范围内,但在开始阶段误差比较大,且在2s以后才逐渐趋于稳定,当机械臂动态模型未知且受众多不确定性因素时,并未能提出满意的控制方法。
针对这些不确定性因素,本文设计一种RBFNN自适应控制器。针对未知的机械臂动力学模型,利用RBFNN对其进行离线辨识和在线学习,在RBFNN充分训练后可近似代替机械臂动力学模型。在此基础上,根据李亚普诺夫函数的稳定性分析,设计RBFNN权值自适应律来逼近补偿机械臂动力学模型中的不确定非线性函数,并设计鲁棒项以进一步减少RBFNN逼近误差和时变扰动带来的影响,同时确保控制系统的稳定性。仿真实验结果表明,这种RBFNN辨识器与RBFNN自适应控制器相结合的方案,可以很大程度上降低时变扰动和内部摩擦因素等不确定性因素对轨迹跟踪精度的影响,并且提高其稳定性。
1 机械臂动力学模型
一般采用牛顿-欧拉(Newton-Euler)方法和拉格朗日(Langrange)方法建立机械臂动力学模型[18-19]。采用Langrange方法建立n自由度机械臂的标称动态模型如下:

(1)

对于机械臂的标称动力学模型式(1),采用计算力矩方法设计控制律,即:
(2)

将式(2)代入式(1)中,可得闭环系统为:
(3)
设定合适的增益矩阵K1和K2,可以保证闭环系统(3)渐近稳定,从而实现对期望轨迹θd的渐近跟踪。
(4)
机械臂的实际动力学模型式(4)很难精确得到,此时,采用计算力矩控制器无法得到期望的控制效果,针对这一不足,本文提出了一种基于RBFNN的自适应控制系统,可以实现高精度的角位移跟踪控制。
2 机械臂RBFNN自适应控制器的设计
在所设计的控制系统中,利用一种RBFNN自适应控制器来逼近和补偿机械臂的内部摩擦和时变扰动等不确定性因素,同时采用一种RBFNN对机械臂的动力学模型进行辨识。针对机械臂动力学模型中的不确定因素所造成轨迹跟踪精度下降问题,该方案采用RBFNN辨识器与RBFNN自适应控制器相结合的方法。
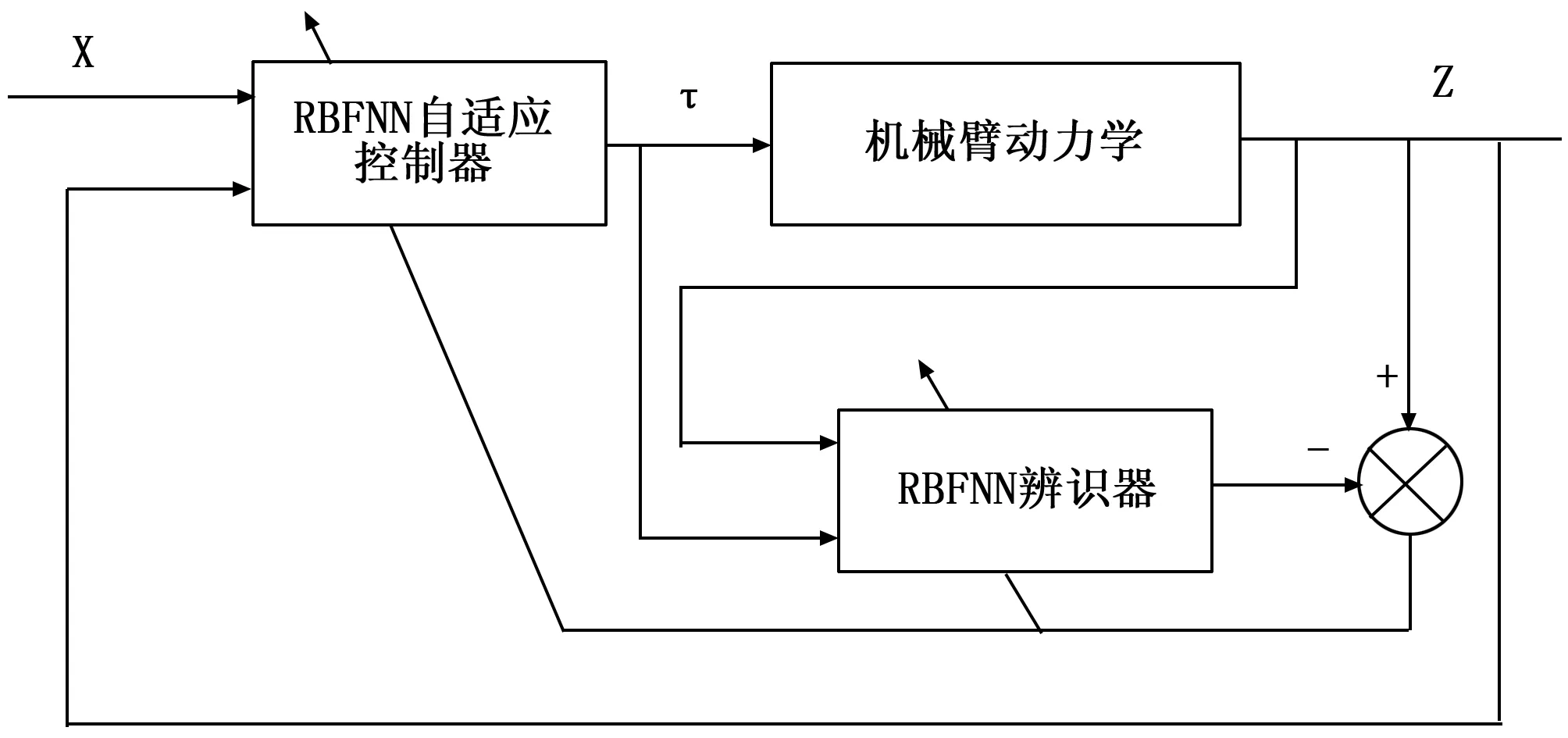
图1 基于RBFNN的机械臂自适应控制结构
2.1 RBFNN辨识器设计
机械臂系统辨识是基于被控对象机械臂系统的输入和输出数据,以确定可以等价替代系统的动力学模型[20-21]。从图1可以看出,RBFNN辨识器的输入和输出分别为:
(5)

RBFNN有三层神经元:隐藏层、输入层和输出层。RBFNN结构如图2所示。其中,RBFNN的输入矩阵为u=[u1;u2;…;uk],其输出矩阵为z=[z1;z2;…;zn],径向基函数矩阵为B=[b1;b2;…;bh],其高斯基函数bj为:
(6)
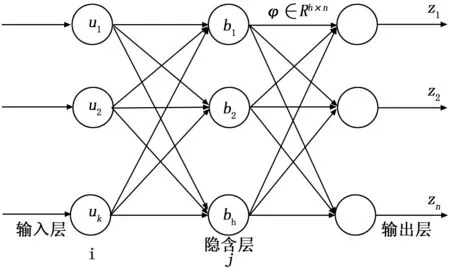
图2 RBF神经网络结构
其中:μj=[μj1;μj2;…μjk]代表RBFNN的第j个神经元的中心矢量,σ=[σ1;σ2;…;σh]代表基函数宽度矩阵,‖u-μj‖表示u和μj之间的欧几里德距离。利用K-means聚类法确定RBFNN基函数中心μj和宽度σj。
RBFNN辨识器的输出矩阵为:
zi=φiTBi
(7)
其中:φI为RBF神经网络权矩阵。
基于梯度下降法,RBFNN基函数中心,宽度及权值参数的迭代算法如下:
(8)
(9)
(10)

2.2 RBFNN自适应控制器设计
RBFNN自适应控制的输入和输出分别为:
(11)
在实际工程应用中,机械臂系统通常存在内部摩擦和时变扰动等不确定性因素,根据式(4),定义滤波跟踪误差函数如下:
(12)

(13)


(14)


(15)

构造李亚普诺夫函数为:
(16)
对式(16)进行求导得:
(17)

(18)
因此,需要采用RBFNN对g(uc)进行逼近如下:
(19)

采用鲁棒项vc来克服时变扰动Td(t)和神经网络逼近误差εc,‖εc‖≤εcN,其中,εcN为一个很小的正常数,则设计鲁棒项vc为:
vc=-(εcN+τcd)sgn(r)
(20)
当系统中存在逼近误差εc和时变扰动Td(t)时,将式(19)代入式(14)中,则控制律设计为:
(21)

(22)



(24)
设χcD>0,χcH>0,χcG>0,χcΓ>0,RBFNN权值自适应调节律定义为:
(25)
其中:P为一个任意常数矩阵,P=PT>0。
2.3 控制系统的稳定性分析
在多数情况下,通过构造李亚普诺夫函数分析所设计的控制系统的稳定性,即:
(26)
对V2求导可得:

(27)
将式(22)代入式(27),得:


rT(Td(t) +εc+vc-K3r)
(28)
将式(25)代入式(28),可得:
rT(Td(t)+εc+vc-K3r)
(29)
其中:

(30)

(31)
或者:
(32)
3 实验结果与分析
为了验证提出的神经网络自适应控制算法的有效性,采用了一种常用的2自由度刚性机械臂作为控制对象[15]。机械臂动力学模型的表达式如式(4),其具体参数为:
(33)
其中:l1为机械臂连杆1的杆长,l2为机械臂连杆2的杆长,即l1=1 m,l2=0.8 m;m1和m2分别表示机械臂连杆1和连杆2的质量,即,m1=1 kg,m2=1.5 kg。
设2自由度机械臂的期望输出轨迹分别为θd1=1+0.2sin(t),θd2=1-0.2cos(t),网络参数取为σI=10,σc=10,μI=μc=0.1,α=0.2,β=0.1。[1,0.2,0.8,0]为机械臂系统的初始状态,径向基神经网络自适应控制参数取为Λ=[200;020],χD=χH=χG=χΓ=0.005,K3=[250;025],P=[250;025],εcN=0.02,τcd=0.1。
利用Simulink和S-Function对所设计的RBFNN自适应控制系统进行实验,RBFNN辨识器的隐含层节点数为6,RBFNN自适应控制器的隐含层节点数为20。RBFNN基函数中心,宽度及权值参数的迭代算法取式(8)~式(9),控制律取式(21),自适应律取式(25),鲁棒项取式(20)。具体的实验结果如下:
图3和图4为两关节角位移和角速度的跟踪轨迹,实线表示机械臂控制系统的给定期望轨迹,虚线表示其实际输出轨迹。结果表明,在机械臂系统受内部摩擦和时变扰动等不确定性因素时,所设计的控制算法可保证机械臂控制系统的实际输出轨迹跟踪给定的期望轨迹。图5为2自由度机械臂的角位移跟踪误差,在刚开始时其跟踪误差略大,但在0.4 s之后,机械臂的跟踪误差基本控制在±0.0005以内接近于零。文[15]的跟踪误差控制在±0.1范围内,在1.5 s后逐渐趋于稳定,并且已有文献的机械臂跟踪误差也仅仅控制在±0.1范围内,在2 s左右才逐渐趋于稳定。但本文的跟踪误差基本控制在±0.0005范围内接近于零,且0.4 s左右基本趋于稳定,其跟踪精度更高。
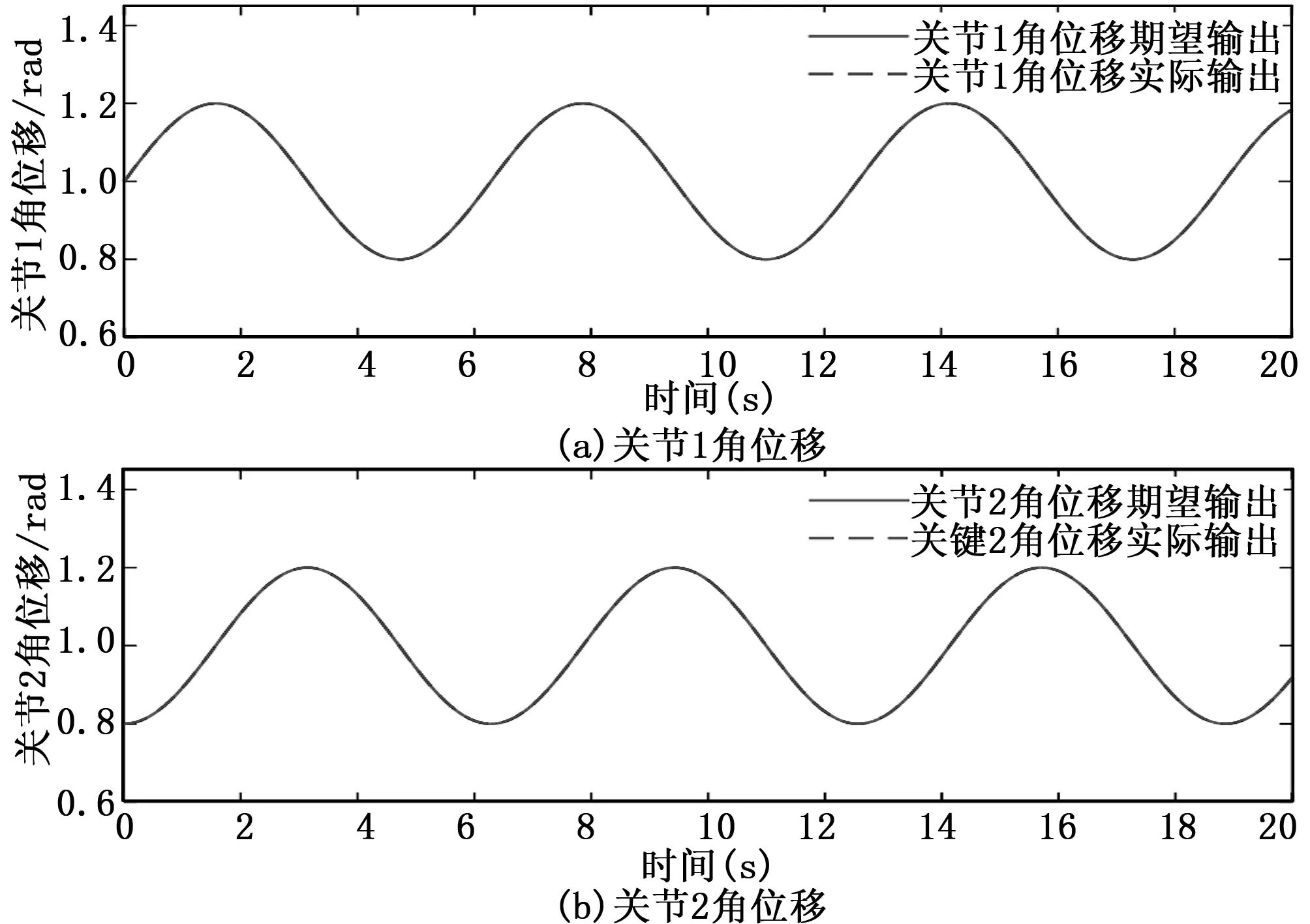
图3 两关节角位移跟踪轨迹
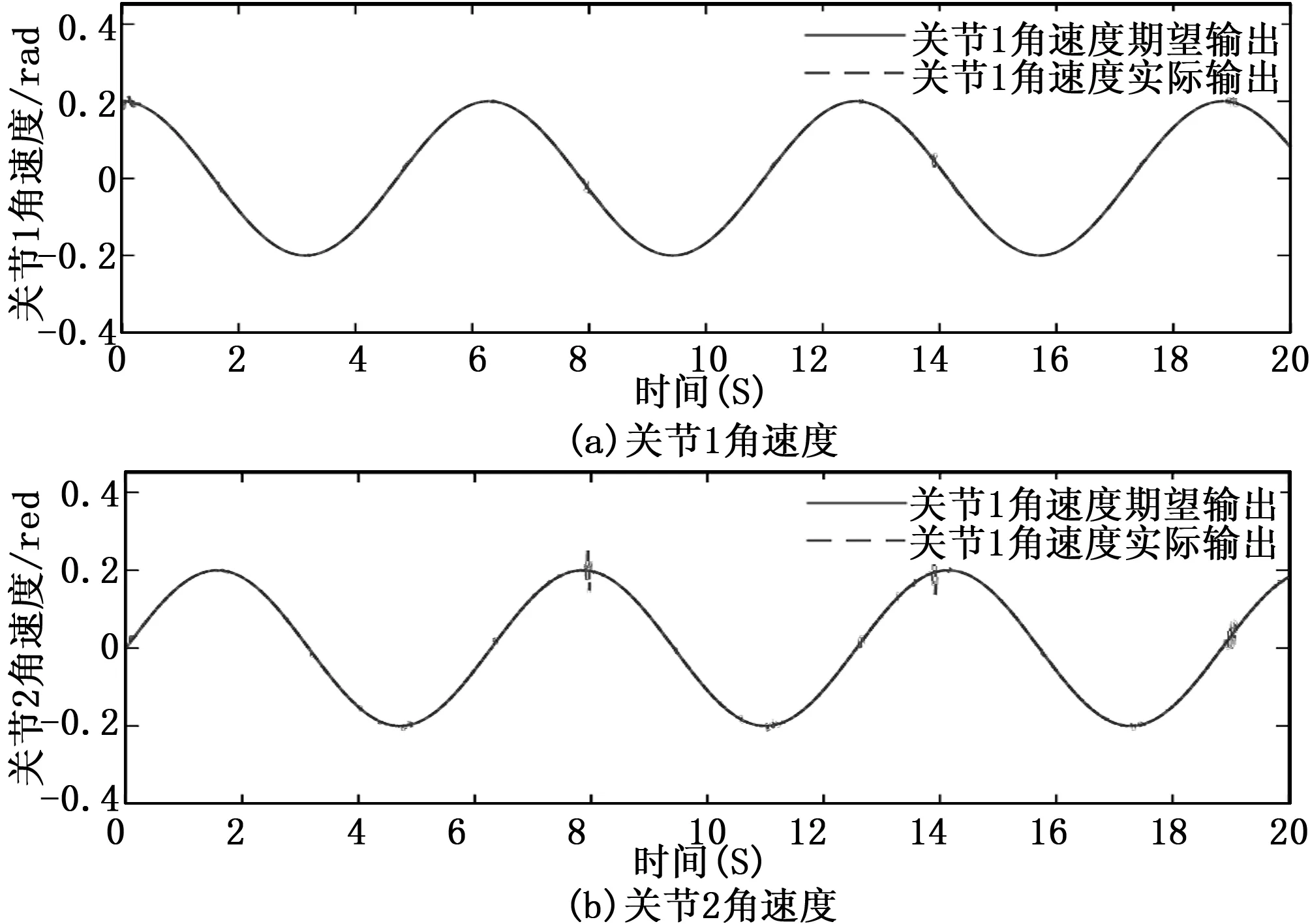
图4 两关节角速度跟踪轨迹

图5 关节1与关节2角位移跟踪误差
图6和图7为RBFNN辨识器的输出。在机械臂动力学模型未知的情况下,从图6和图7可以看出,机械臂各关节的辨识输出与期望输出曲线几乎重合,采用RBFNN辨识器可以很好地辨识机械臂的动态模型。图8为2自由度机械臂角位移辨识误差,由于神经网络初始参数的影响,在刚开始阶段其辨识误差较大,但在随后的训练过程中辨识误差基本控制在±0.002范围内,仿真实验结果表明RBFNN辨识器对机械臂动态模型的辨识精度很高。
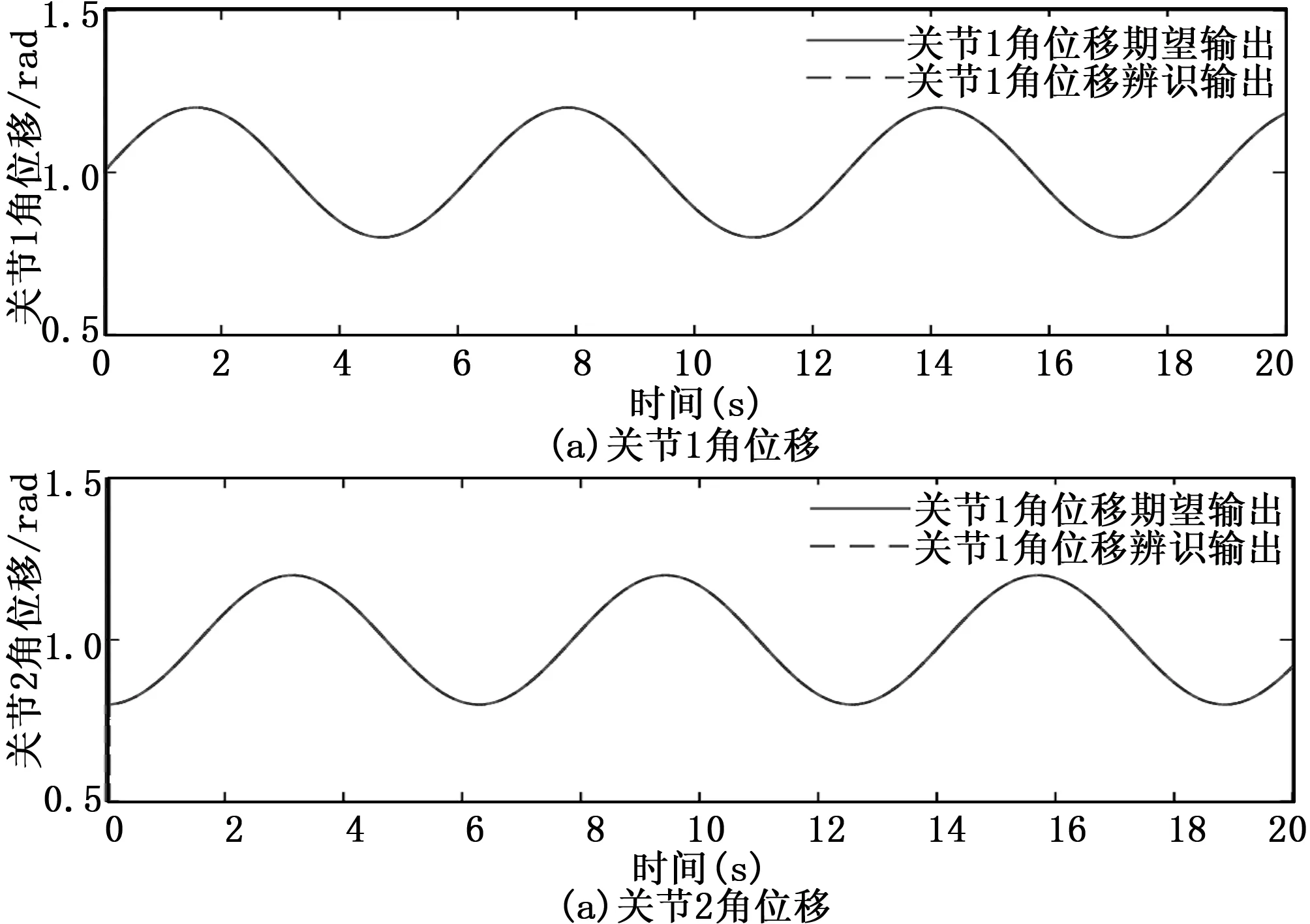
图6 两关节角位移辨识输出
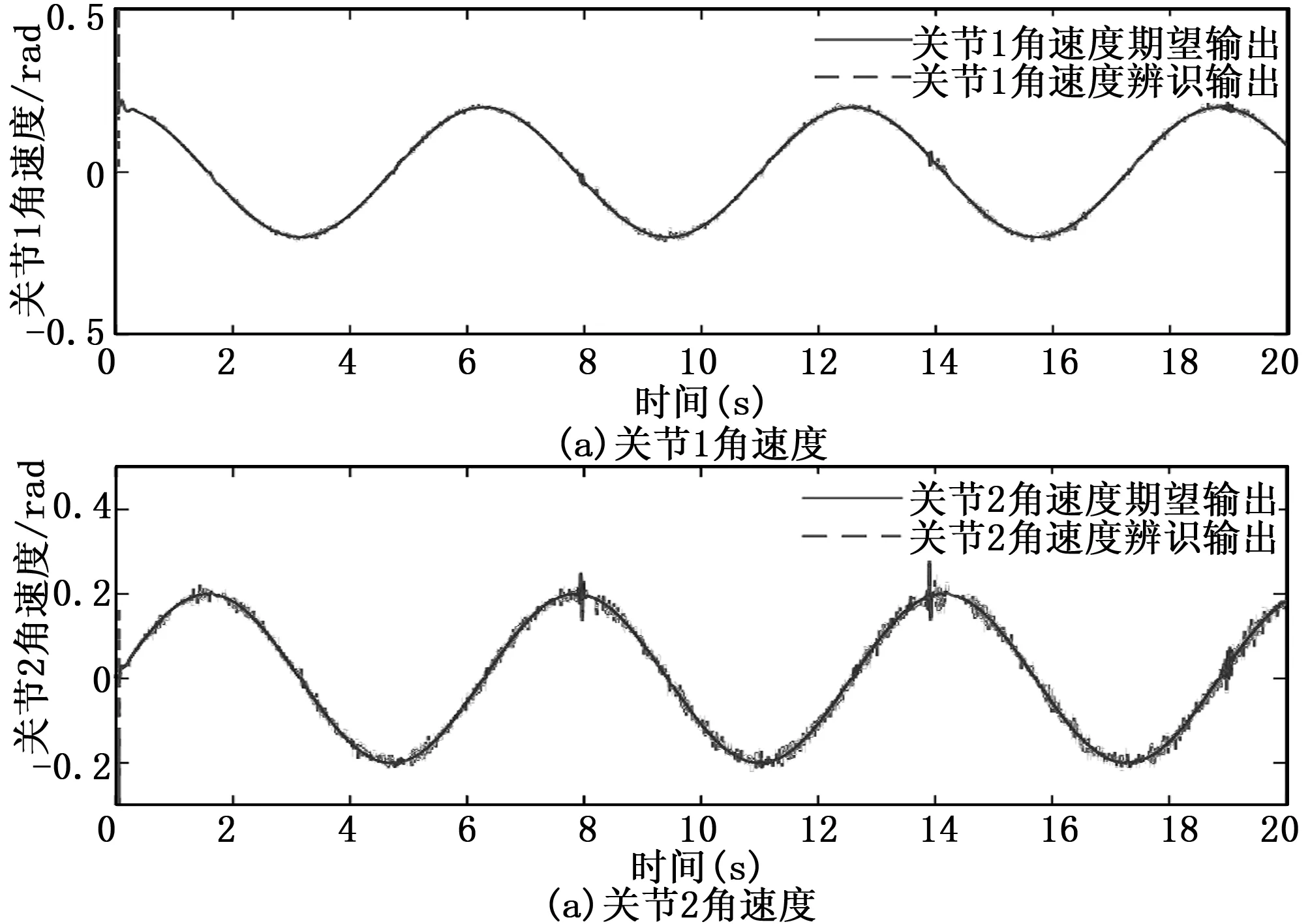
图7 两关节角速度辨识输出
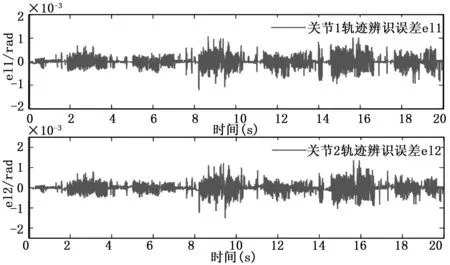
图8 关节1与关节2角位移辨识误差
图9为关节1和关节2的控制输入转矩,也是RBFNN自适应控制器的输出,用来控制机械臂的实际轨迹总能跟踪给定的期望轨迹。

图9 关节1与关节2控制转矩曲线
图10是RBFNN对不确定非线性函数g的逼近情况。通过与自适应模糊补偿控制算法进行对比,与文[15]中的图4对比可以看出,采用本文所设计的RBFNN自适应控制律,可以对不确定非线性函数进行更好的逼近补偿。
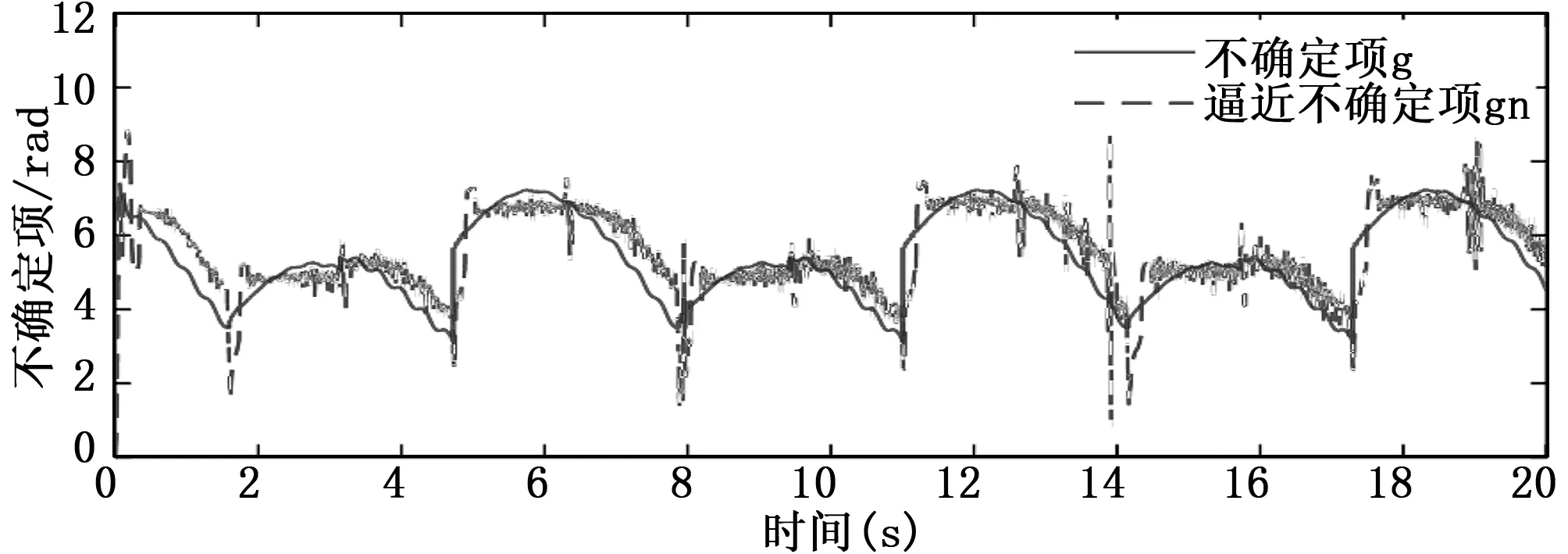
图10 对不确定项的逼近曲线
从上述实验结果可以看出,当机械臂存在内部摩擦和时变扰动等不确定性因素且机械臂动力学模型未知的情况下,采用RBFNN自适应控制器与辨识器相结合的控制策略,可实现对机械臂进行较好地轨迹跟踪控制。该方法不仅可以克服众多不确定性因素带来的影响,并且对不确定非线性函数具有很高的逼近精度,进而实现对期望轨迹更高的跟踪精度。另外机械臂的控制转矩波动较小,同时能够确保机械臂控制系统的稳定性。
4 结束语
针对多自由度机械臂轨迹跟踪控制系统受时变扰动和内部摩擦等不确定性因素的影响,导致跟踪精度和控制性能不理想的问题,提出了一种基于RBFNN的轨迹跟踪自适应控制方法。该方法采用了RBFNN辨识器对机械臂的动态模型进行辨识,并且基于李亚普诺夫稳定性理论设计了RBFNN权值的自适应调节律,对不确定非线性函数中的各项参数分别进行了逼近补偿,也可以对其进行整体逼近,但是整体逼近没有分块逼近得到的跟踪效果好。对扰动和逼近误差设计了鲁棒控制器,同时能够确保机械臂控制系统的稳定性。将理论分析、系统稳定性分析和仿真实验结果分析三者相结合研究了内部摩擦和时变扰动等众多不确定性因素对机械臂轨迹跟踪控制的影响。仿真实验结果验证了机械臂在受众多不确定性因素影响的情况下,RBFNN自适应控制系统具有很高的轨迹跟踪精度、抗干扰能力和较强的鲁棒性。
