新切换混沌系统的构造及自适应同步*
2019-07-19孙常春
郑 莉, 孙常春
(沈阳建筑大学 理学院, 沈阳 110168)
混沌,作为非线性现象,广泛存在于各个研究领域,如医学、化学、生物学和经济学等,其研究方式也从最初的消除混沌变为研究混沌[1]和应用混沌[2],通常先通过计算机软件调试出混沌系统,再将其应用到用电预测[3]、图像加密和安全通信[4]等领域.在这样的背景下,许多特殊的混沌系统[5]不断被提出,如变换参数会呈现不同类型平衡点的多特征混沌系统、分数阶导数的混沌系统[6]、具有无穷多平衡点或者没有平衡点的混沌系统[7]、轮胎形和喇叭形的混沌系统、切换混沌系统[8]、平移混沌系统等.很多学者也致力于混沌同步的研究,目前,在许多系统上,不仅实现了两个或三个系统之间的自适应同步[9]、反同步、广义同步、投影同步、混合同步[10],而且完成了不同维数系统间的同步.其中,在自适应同步中,自适应同步器能够不断读取驱动系统的信息,使得响应系统能够逐渐调整,最终与驱动系统同步.本文提出的带有立方项的分段切换混沌系统,由一个混沌系统和一个非混沌系统切换生成,该切换混沌系统呈锥形,在x1-x2平面上的投影为苹果形.
1 带立方项混沌系统
1.1 混沌系统概述
本文提出一种新的带立方项的混沌系统,其由两个系统切换产生.第1个系统的表达式为
(1)
式中,a、b、c、d、e、f、g、h、i、j为系统中的未知参数.每个参数都在一定的范围内使得系统是混沌的,并且系统的相图在参数不同时,往往也有较大的变化.系统(1)中一共有10项,其中,二次交叉项、平方项、立方项和线性项的个数分别为4、1、1、4个.
1.2 混沌系统的相图及Lyapunov指数谱
通过计算机仿真,当a=15,b=12,c=1,d=2,e=10,f=8,g=7,h=9,i=2.8,j=0.5时,系统呈混沌态,如图1所示.

图1 系统(1)的相图Fig.1 Phase diagram of system(1)
Lyapunov指数谱是一种定量分析的方法,系统(1)的Lyapunov指数谱如图2所示.
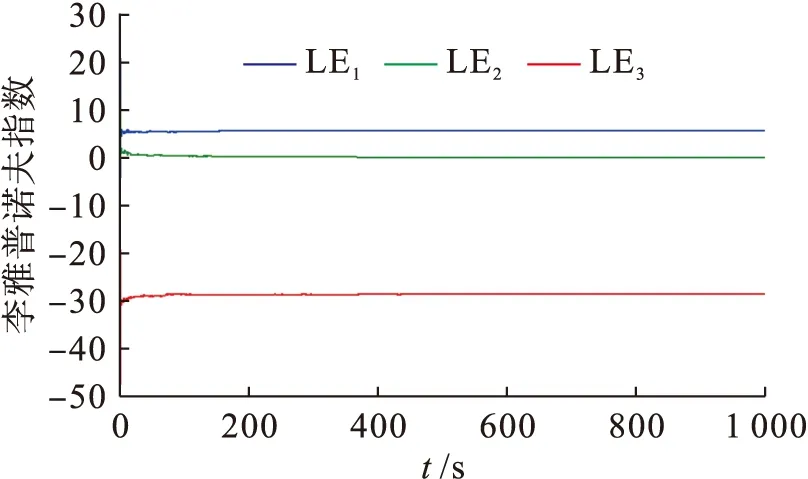
图2 系统(1)的Lyapunov指数谱Fig.2 Lyapunov exponent spectrum of system(1)
LE1、LE2、LE3为随时间t变化的李雅普诺夫指数,LE1>0,LE2=0,LE3<0,LE1+LE2+LE3<0,系统混沌.
2 加入线性项的非混沌系统
第2个系统的表达式为
(2)
式中,a、b、c、d、e、f、g、h、i、j、m为与系统(1)相同的未知参数.系统(2)比系统(1)多一项,共11项,其中,非线性项和线性项的个数分别为6、5个,当a=15,b=12,c=1,d=2,e=10,f=8,g=7,h=9,i=2.8,j=0.5,m=6时,相图如图3所示.
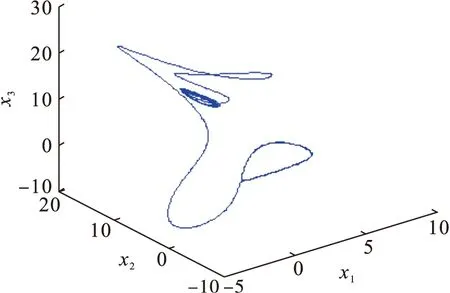
图3 系统(2)的三维空间相图Fig.3 3D spatial phase diagram of system(2)
系统(2)的Lyapunov指数谱如图4所示.由图4可知,系统(2)是非混沌的.

图4 系统(2)的Lyapunov指数谱Fig.4 Lyapunov exponent spectrum of system(2)
3 带立方项切换混沌系统
3.1 切换混沌系统概述
当x2>0时,运行系统(1),当x2≤0时,运行系统(2),得到带立方项的切换混沌系统,其表达式为
(3)

3.2 切换混沌系统的相图及庞加莱映射图
当a=15,b=12,c=1,d=2,e=10,f=8,g=7,h=9,i=2.8,j=0.5,m=6时,系统(3)的相图如图5所示.系统(3)的相图形状经过折叠和旋转,最后大致呈锥面,且在x1-x2面上的投影为苹果形状.

图5 系统(3)的相图Fig.5 Phase diagram of system(3)
本文采用庞加莱截面法讨论动力系统(3)的性态,图6为在x3=32截面上,用计算机模拟出的庞加莱映射,图中呈现出成片密集的点,且富有层次性,进一步说明该系统的吸引子具有复杂的折叠行为.
3.3 切换混沌系统平衡点
系统(3)的雅克比矩阵为
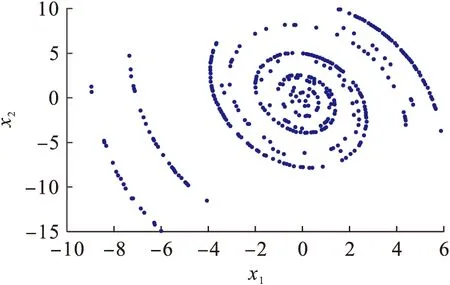
图6 x3=32截面上的庞加莱映射Fig.6 Poincare mapping on cross section with x3=32

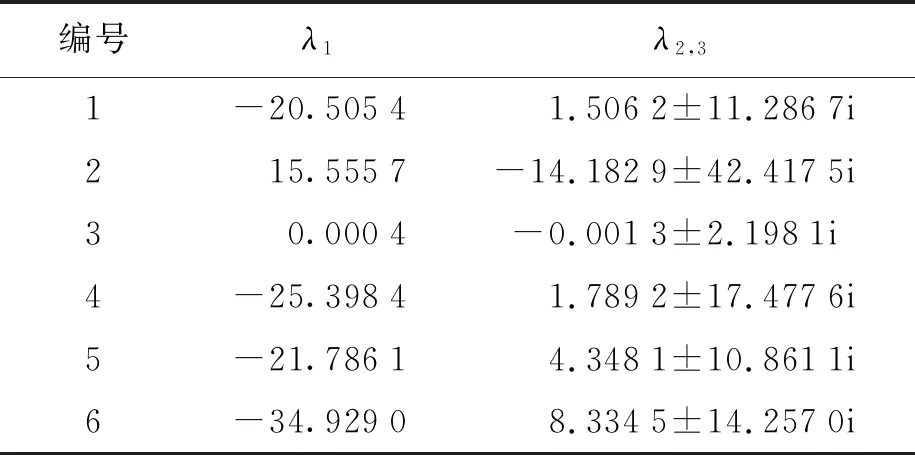
表1 系统(3)的特征值Tab.1 Eigenvalues of system(3)
因此,系统(3)的诸多平衡点均为不稳定的鞍焦点,具备产生涡卷的条件.
4 自适应控制器的设计与仿真实验
4.1 自适应控制器的设计
本文令系统(3)为驱动系统,系统(4)为响应系统,其中,u1、u2、u3为控制器,则有
(4)
令e1=y1-x1,e2=y2-x2,e3=y3-x3,由式(4)减去式(3)可得
(5)
令
(6)
将式(6)代入式(5),则有
(7)

(8)

取Lyapunov函数为
该函数在R6上是正定函数,即
=e1[-eae1+ebe2+ec(x1x3-y1y3)+ed(x2x3-
y2y3)-em(f(y)-f(x))-k1e1]+e2[eee2+
ef(y1y3-x1x3)-k2e2]+e3[eg(x1x2-y1y2)-

4.2 仿真实验
图7为计算机模拟出的误差曲线随时间t的变化轨线,可以看出,在很短的时间内,误差即稳定为0.

图7 加入控制器时系统(3)、(4)的同步误差曲线Fig.7 Synchronization error curves of systems (3) and (4) with action of controllers
5 结 论
本文在提出的带三次项三维混沌系统中加入了简单的线性切换项后,其吸引子的图像更为特殊和新颖.采用的自适应控制器及更新规则设计方案,对具有高次项和切换项的混沌系统均适用,且在易于实现的基础上,同步速度也非常快.
