基于物联网的网络控制器设计*
2019-07-19周恩浩李玉玲何均健
周恩浩, 李玉玲, 何均健
(华南农业大学 现代教育技术中心, 广州 510642)
随着各行各业不同信息之间的相互交互,物联网的概念被提出[1-2].物联网技术的最终目的是通过不同传感器组成的网络节点将不同事物连接起来,使人和物之间随时随地都能够很好地进行信息交互.对于传统通信网络而言,一般都是在终端设备中嵌入对应的数据收发模块,然后再利用以太网等接入至网络当中,最后再通过PC机或者手机来对其进行访问,以获取传输来的信息[3-4].随着物联网规模的不断提升,若要实现多源信息的顺畅交互,传感器网络需由布置多种感知类节点的网络所构成.然而不同的传感器节点具有不同的协议,且综合考虑远距离联网能力、功耗要求以及系统成本等因素,多终端设备直接接入网络具有一定的难度,无法真正的实现物联网体系的互联互通[5-6].因此,需要一种新型的网络控制器,能够使物联网系统的多种终端设备无缝连接至网络当中.
本文设计了一种基于物联网的网络控制器控制方案,提出了物联网网络控制器的整体设计方案和系统整体框架,并在此基础上阐述了网络控制器系统的硬件和软件实现部分,最后对物联网网络控制器的整体性能进行了测试.
1 网络控制器系统方案
物联网网络控制器主要是连接物联网节点的通信网络和传感器网络,并对其实施管理.本文首先通过数据采集终端进行数据采集,并通过无线传感器模块传送至网关模块,再将该数据通过现场总线等通信方式传输至上位机的监控中心,对通信网络的数据和传感器网络数据进行深度融合,最后实现数据的统一安全管理.
网络控制器系统具备的主要功能有:1)无线、有线网络接入能力.网络控制器系统需要通过无线、有线网络与监控中心进行远程通信,其中无线通信是采用移动通信与互联网连接,而有线通信则是构建局域通信网络.2)无线传感器网络接入能力.为实现不同采集终端数据的收集,网络控制器需具备和无线传感网络进行通信的功能,进而实现物联网系统所有传感网络节点的连接.3)数据协议转换能力.为实现无线网络、有线网络以及无线传感网络之间的数据转换,需统一不同感知网络的协议,网络控制器需具备不同数据协议转换能力.4)管理控制能力.无线传感网络的控制中心是网络控制器,因此无线传感网络的启动、组网和删除增加监测点等功能由网络控制器进行管理和控制.5)数据存储能力.网络控制器能够实时地存储采集的终端数据,便于监控中心实时查看.
物联网网络控制器系统的整体方案如图1所示,采集终端对所需要的数据进行采集,采用ZigBee无线传感器网络连接至网关设备,而网关设备又采用3G无线网、有线网络以及工业总线等网络与远程监控PC进行数据交互,进而实现物联网系统所有节点的统一管理.
2 网络控制器系统的硬件设计
根据物联网的基本功能,中国通信标准化协会(CCSA)将物联网分为感知层、传送层和应用层,而物联网网络控制器处于传送层.其中感知层具备检测以及近距离通信功能,主要组成为传感网络和数据采集设备,传感网络又是由多种数据采集设备、传感器设备节点等组成,而数据采集设备由各类传感器和ZigBee模块等组成;传送层具备远程通信及网络调节的功能,在以太网基础上,远程传输感知层采集的数据信息,实现感知层网络与以太网络的结合;应用层则根据处理的数据信息为用户提供应用和服务,处理和控制多种通信设备的信息.

图1 物联网网络控制系统方案设计图Fig.1 Scheme design of network control system based on Internet of Things
基于物联网的网络控制器系统硬件总体结构如图2所示,主要是负责无线传感器网络、3G无线网络以及CAN/RS-485工业网络的数据交互和管理,需完成各类通信数据的协议转换.物联网网络控制器具体由微处理芯片、通信模块、无线通信模块、外部接口电路、电源、存储模块及以太网接口等几部分组成.

图2 硬件总体结构图Fig.2 Overall hardware architecture diagram
根据系统的功能需求,选用型号为Marvel PXA310的ARM9作为核心处理器[7]来构建网络控制器的最小系统,外围扩展功能模块主要有网络模块、3G模块、CAN模块、RS-485模块以及ZigBee模块[8-9],其中ZigBee模块用于数据采集终端,是无线传感器网络的协调器.
在外围扩展模块电路中,网络模块采用型号为DM9000AEP的芯片,该芯片是一款高速的以太网控制器芯片,以太网传输协议为802.3;3G模块选用的是LC5740模块,能够实现3G网络的功能,完成与监控系统的数据交互;CAN模块与处理器的接口采用的是SPI接口,分别采用MCP2515芯片和SN65HVD230D将SPI格式的数据转换为CAN总线数据;RS-485与处理器接口采用的是UART接口,采用SN65HVD11D芯片将UART接口电平转换为RS-485总线电平.
除了ARM核心处理器和扩招模块之外,还应配备满足系统正常运行的外围最小系统电路,如图3所示,主要有电源电路、时钟电路、存储器系统、JTAG接口和复位电路等模块,其中电源电路为各个子系统提供电力支撑,所需要的直流电压等级有12、5、3.3和1.8 V.
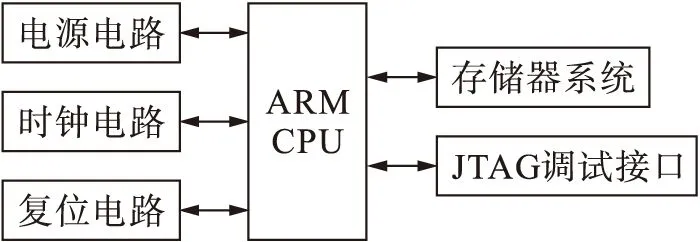
图3 外围最小系统电路Fig.3 Minimum peripheral system circuit
对于无线传感器网络,数据采集终端ZigBee的型号为FZB5000的无线模块,其频段为2.4 GHz,对应的标准协议栈为ZigBee-Pro.ZigBee与数据采集终端以及网络控制器平台都是采用UART接口.
3 网络控制器系统的软件设计
基于物联网的网络控制器软件部分主要是在硬件的基础上,实现不同通信协议的转换以及完成数据采集终端、监控中心的连接,将嵌入式Linux操作系统植入到ARM处理器,实现所有程序的统一管理.网络控制器系统的软件结构如图4所示,软件平台在Linux系统上实现,主要包括数据处理层和协议栈层,协议栈包含的协议有以太网协议、ZigBee-Pro协议等,数据处理层主要是对数据进行管理和转发.
嵌入式系统的核心部分是网络控制器的主应用程序,主要功能包括:各种不同通信模块之间协调传输、不同通信协议之间转换以及数据信息采集功能.所有的程序采用Linux C进行编写,系统软件部分最开始运行的是主函数部分,主函数首先完成变量的定义以及初始化,然后完成各个子模块的对应功能,并使主函数进入死循环,其流程图如图5所示.
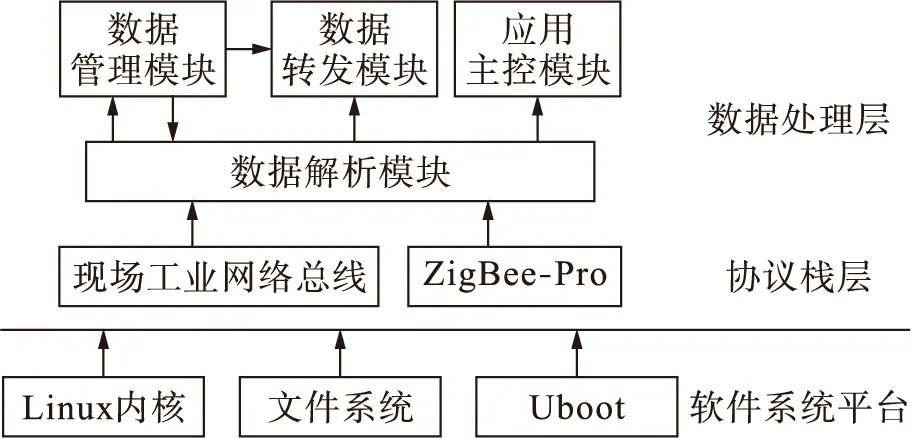
图4 网络控制器系统的软件结构Fig.4 Software structure of network controller system
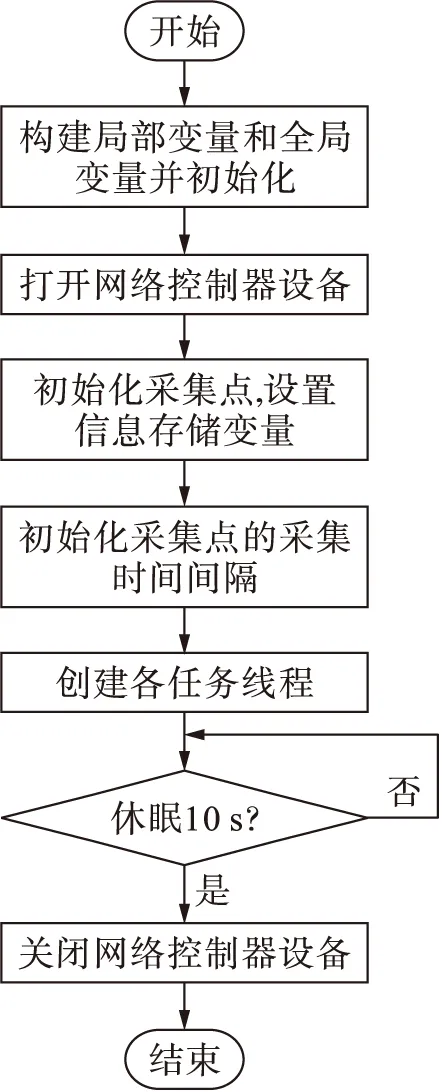
图5 主程序流程图Fig.5 Flow chart of main program
网络控制系统中通信任务的主体流程图如图6所示,首先将各自通信设备打开并对其初始化,初始化之后便开始等待服务器发送命令,若出现命令,便对命令码和命令长度进行读取,以判断该命令码是否存在.如果存在命令码,则根据命令长度接收命令内容,再一次判断该命令是否需由命令处理线程进行处理,直至处理成功.
4 网络控制器系统实验测试
首先,本文对网络控制器的主控模块进行了测试,网络控制器主控模块主要是接收Zigbee传送的数据,并通过解析将其发送至IP网络.网络控制器IP地址为192.168.139.72,终端网络客户端的IP地址是192.168.139.73,通过解析后得到的数据结果如图7所示.从图中可以看出,节点的网络地址、网络控制器Zigbee模块的地址以及节点电压、温度等信息能够有效读取.该测试结果表明,该网络控制器能够实现Zigbee无线网络和IP网络的联通.

图6 通信任务主体流程图Fig.6 Main flow chart of communication task

图7 IP客户端结果Fig.7 Results of IP client terminal
在基于物联网的网络控制系统中,网络传感器读取串口数据的丢包率以及网络控制器与以太网之间的数据传输延时是两个重要的指标,为验证系统的可行性和有效性,对两项指标进行了性能测试.本次实验测试中,设置了20组不同的无线传感器网络节点,数据信息的发送周期为5 s,以1 000个数据包为一个间隔来测量丢包率,第1~1 000个数据包记为第1组,第1 001~2 000个数据包记为第2组,以此类推,第19 001~20 000个数据包记为第20组,两项指标的实验结果如图8、9所示.

图8 网络控制器系统丢包图Fig.8 Packet loss diagram of network controller system
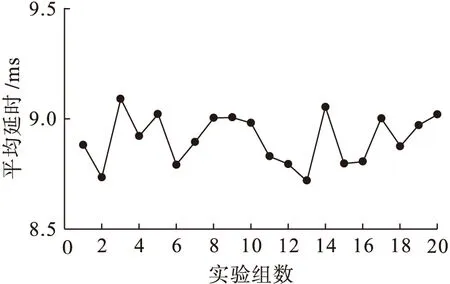
图9 网络控制器系统信息延时图Fig.9 Information delay diagram of network controller system
由图8可知,20次实验结果的平均丢包率为0.27%,测试结果远低于中国通信标准化协会规定的最大丢包率1%,因此满足要求.由图9可知,20次实验结果的平均时延分别为:8.878 49、8.736 04、9.100 39、8.928 68、9.023 81、8.788 69、8.896 75、8.998 92、9.010 12、8.981 02、8.828 06、8.789 18、8.729 23、9.058 92、8.796 78、8.812 13、8.997 91、8.879 26、8.971 52、9.019 82 ms,也低于规定平均时延的最大值100 ms,因此也满足要求.综上所述,文中所设计的网络控制器系统能够满足实际应用的要求.
最后,对通信距离进行了测试,对于无线传感器网络分别采用圆柱天线和陶瓷天线进行了无线通信距离的测试,网络控制器系统的其他参数保持不变.两种天线的测试结果都符合CCSA标准,当网络控制器系统的协调器采用是圆柱天线,而终端节点采用圆柱或者陶瓷天线时,两个不同节点之间的最大通信距离是90 m.当网络控制器系统的协调器采用是陶瓷天线,而终端节点采用圆柱或者陶瓷天线时,两个不同节点之间的最大通信距离是30 m.
5 结 论
本文设计了一种基于物联网的网络控制器设计方案,提出了物联网网络控制器的整体设计框架,并基于此介绍了网络控制器各子系统的硬件和软件实现方法.该网络控制器具有多种无线网络接入、协议转换、数据采集、数据存储及网络传输等功能,其传感器系统实现了无线传感网络和工业总线网络之间数据的交互、不同网络协议的转换以及物联网系统的统一管理.最后通过实验测试网络控制器的主控模块特性、网络传感器读取串口数据的丢包率以及网络控制器与以太网之间的无线通信延时情况,实验验证了物联网网络控制器的良好性能.