基于Inventor的耙矿绞车三维机构运动分析
2019-07-16杨有林张周平谢世棋杨亚平高泽民
仲 伟, 杨有林, 张周平, 谢世棋, 杨亚平, 高泽民, 姜 丽
(金川集团公司, 甘肃 金昌 737100)
0 前言
耙矿绞车在我公司所属矿山井下使用较广,其经济实用、适应性强、安全可靠等特性使之成为井下使用较多的采场出毛(毛石)设备,我们在实际使用和检修中发现,修理人员由于对耙矿绞车内部的行星齿轮系统及差动轮系不了解,对其检修调试工作存在一定障碍,对检修造成一定的影响。由于修理人员专业理论上相对不够深厚,加上差动轮系是轮系中较为复杂和专业,技术人员若直接从理论上讲,在现场讲解起来就较为生涩,难于理解,为此,我们利用现在的计算机三维软件建模制作出设备的三维模型,并装配成数字样机,然后驱动数字样机,进行设备工作仿真运转,通过生动、逼真的运动模拟,使修理人员对设备的运转原理进行了充分地理解,并在其随后的设备故障判断中极大的提高了工作效率,降低盲目性。计算机三维软件我们用的是AutoDesk Professional Inventor,是机械工程里较为好用的三维软件。

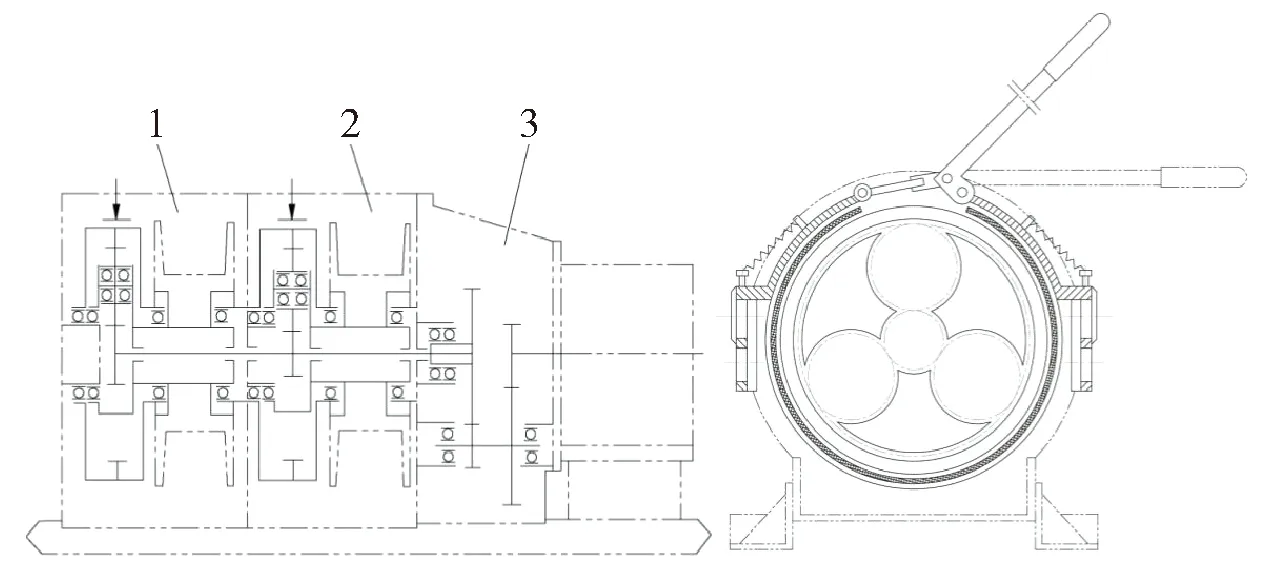
图1 耙矿绞车示意图
1 Inventor软件简介
Inventor是美国AutoDesk公司推出的一款三维可视化实体模拟软件,能够建立真实地反映系统的三维实体模型,并且可以将多个三维实体模型装配为系统进行机构动态分析。包括:零件造型、钣金、装配、表达视图和工程图等设计模块。该软件不仅具有强大的实体造型、曲面造型、虚拟装配和产生工程图等设计功能,而且在设计过程中可以进行有限元分析、机构运动分析、动力学分析和仿真模拟,提高了设计的可靠性。由于具有简单易用、二三维数据无缝转换等特性,使其在教育、制造、电子、汽车、航空等领域得以迅猛发展和普及。
2 耙矿绞车传动系统结构及绞车工作原理
2.1 绞车传动系统结构
耙矿绞车俗称电耙子,其主机主要由驱动电机、普通二级齿轮减速器、主刹车机构(主操纵机构)、主卷筒、副刹车机构(副操纵机构)、副卷筒等组成(如图2所示),其中,主刹车机构及主卷筒内含1个行星齿轮减速器,副刹车机构及副卷筒同样也内含1个行星齿轮减速器,这两个行星齿轮减速器结构相同,皆为差动轮系,但减速比不同,两套差动轮系的中心轮都靠同一传动轴驱动,该传动轴长度较长,贯穿两个行星齿轮减速器,其本身驱动由前面的二级齿轮减速器的输出端驱动。

1.副刹车机构 2.副卷筒 3.主刹车机构 4.主卷筒 5.减速机6.电动机 7.副差动轮系 8.主差动轮系图2 耙矿绞车传动系统结构配置图
差动轮系是一种先进的齿轮传动机构,具有结构紧凑、体积小、质量小、承载能力大、传递功率范围及传动范围大、运行噪声小、效率高及寿命长等优点。
两套轮系结构相同(如图3所示),两个内齿圈都同为刹车轮,两个轮系的系杆都与相应的卷筒固定为一体,但主差动轮系减速比大于副差动轮系,即主卷筒转速低于副卷筒。
1.副差动轮系 2.主差动轮系 3.定轴轮系图3 耙矿绞车传动轮系结构图
2.2 绞车工作原理
耙矿绞车工作开始工作时是在电机启动后,当两个内齿轮均未被闸住的时候,则两个内齿轮都旋转,但此时主、副卷筒在钢丝绳和耙斗作用下都不动,如图4所示。

图4 井下耙矿绞车工作状况示意图
(1)当制动主刹车制动手柄,使主差动轮系内齿圈刹住,则与之相应的主卷筒在行星轮和行星架的带动下旋转缠绳,拖动耙斗耙毛石,副卷筒在钢丝绳作用下转动,其转向与主卷筒转向相反,但转速与主卷筒相同,由此平稳旋转放绳;
(2)松开主刹车制动手柄,操纵副刹车手柄制动,使副差动轮系内齿圈刹住,则与之相应的副卷筒在行星轮和行星架的带动下旋转缠绳,拖动耙斗快速(副卷筒转速高于主卷筒)返回毛石堆,同理,主卷筒在钢丝绳作用下,其转向与副卷筒转向相反,但转速副卷筒相同,以此完成快速旋转放绳;
(3)交替操纵主、副刹车手柄,耙斗即做往复运动完成耙毛石工作。期间,驱动电机自始至终保持转速及转向不变,通过差动轮系完成运动的分解及运动方向的改变,即如此循环往复运动,实现其工作需求。
3 Inventor三维数字建模及机构运动仿真
3.1 绞车Inventor三维数字建模
以现场使用中的2JP- 15型耙矿绞车进行建模,主要参数为:
(1)齿轮模数都为4 mm;
(2)主差动轮系:中心轮Z1=22,行星轮Z2=29,内齿圈Z3=80。
(3)副差动轮系:中心轮Z1=34,行星轮Z2=23,内齿圈Z3=80。
在用Inventor软件建模时只考虑传动齿轮为实体建模为主,其它构件尽量简化,前提是保证模型系统为耙矿绞车主机传动系统的真实比照,否则模拟的就不是耙矿绞车的真实的运动仿真。具体方法如下:
(1)所有轴承处都用铰支孔联接替代,简化后仍可保证其转动性;
(2)部件装配中,键连接尽量保持原有,便于理解,简单处可省略但必须用约束命令将其与相应部件约束为一体;
(3)机架及制动部件尽量简化,能保证原有工作要求即可;
(4)各结构件建模时尽量简单,装配后要保证间隔,同时要保证便于观察,尽量减小部件间的遮挡;
(5)各部件配色要求相应地对比分明。
通过Inventor绞车传动系统三维建模如图5所示。
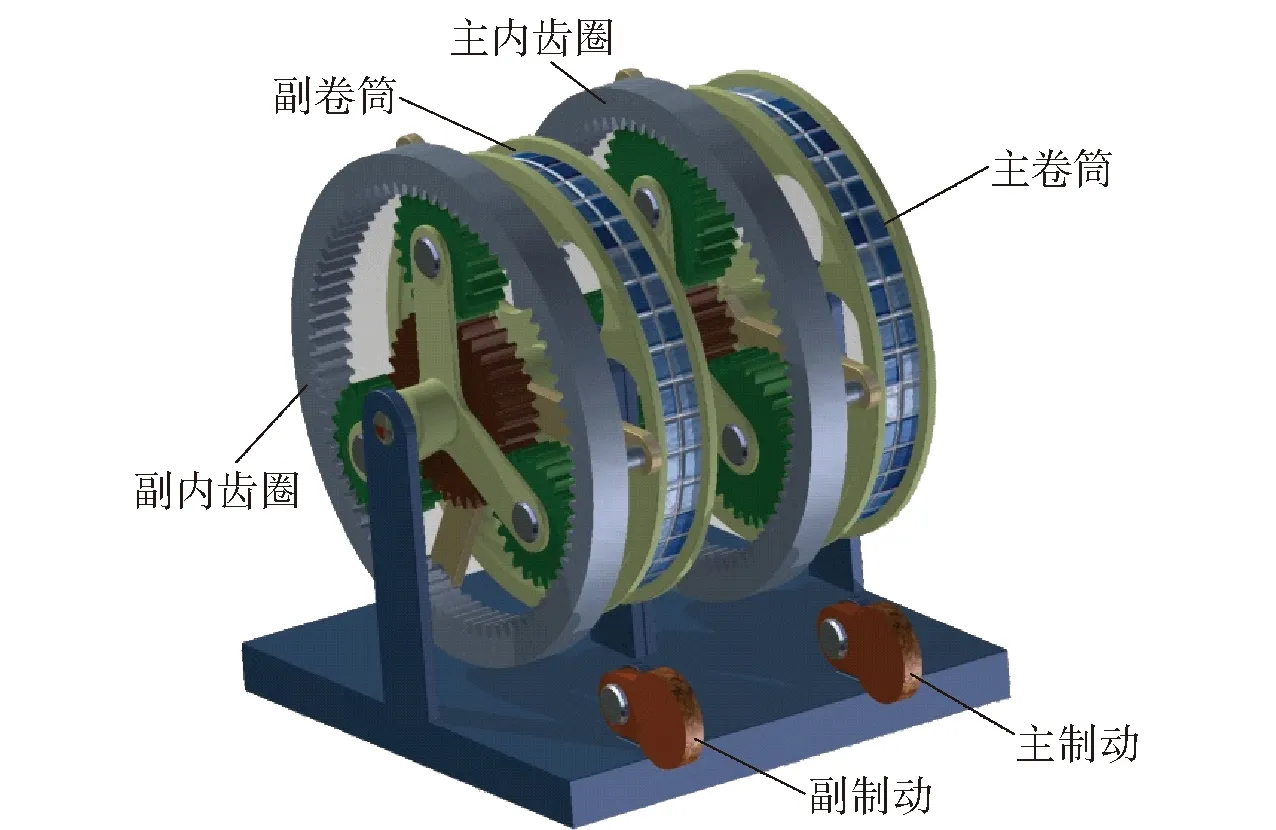
图5 耙矿绞车传动系统Inventor三维建模模型布置图
3.2 绞车Inventor机构运动仿真
由于该绞车传动系统中运动部件达20余个,都为转动,为保证Inventor软件能完成运动仿真的效果,在做运动约束时要注意全部使用“放置约束”里面的“角度约束”,而且选取“定向角度约束”选项(如图6所示)。也即其中的齿轮啮合不用软件的“转动约束”而用“角度约束”。在“角度”栏中填入“传动比”*1deg,以保证数值单位是“度”。模型建好后,关键的就是后面的动画设计。

图6 Inventor建模放置约束示意图
本文模拟的耙矿绞车动画全部有4个过程,具体为:
(1)主副制动均未执行时传动机构的运行形态;
(2)主制动执行,副制动未执行时传动机构的运行形态;
(3)主制动脱开,副制动执行时传动机构的运行形态;
(4)主副制动全部脱开时传动机构的运行形态(同(1));
利用Inventor软件中的Inventor Studio功能对模型中的各部件按步骤有条件的进行动画设计,然后进行驱动,完成前述的耙矿绞车的运动仿真,在Inventor Studio中,本模型选用“位置表达动画”和“参数动画”进行动画设计,并且先用“位置表达动画”设计整个动画的“骨架”,然后用“参数动画”对“骨架”进行“添加血肉”,从而保证动画设计清晰有序进行,繁而不乱,具体如下:
(1)在“装配”界面中设置“位置1”和“位置2”,并在“激活”条件下分别对主副卷筒和主副内齿圈分别进行“替代”及“固定”设置;
(2)在“装配”界面中调出“参数”选框,将主副差动轮系转动部件相对应的参数项重新用大写字母和数字命名,并将参数最右边选框的“√”打上(如图7所示),在对主副差动轮系相同部件进行参数命名时要用相同的字母,用不同的脚标区分,便于设计及检索时对参数的辨认;
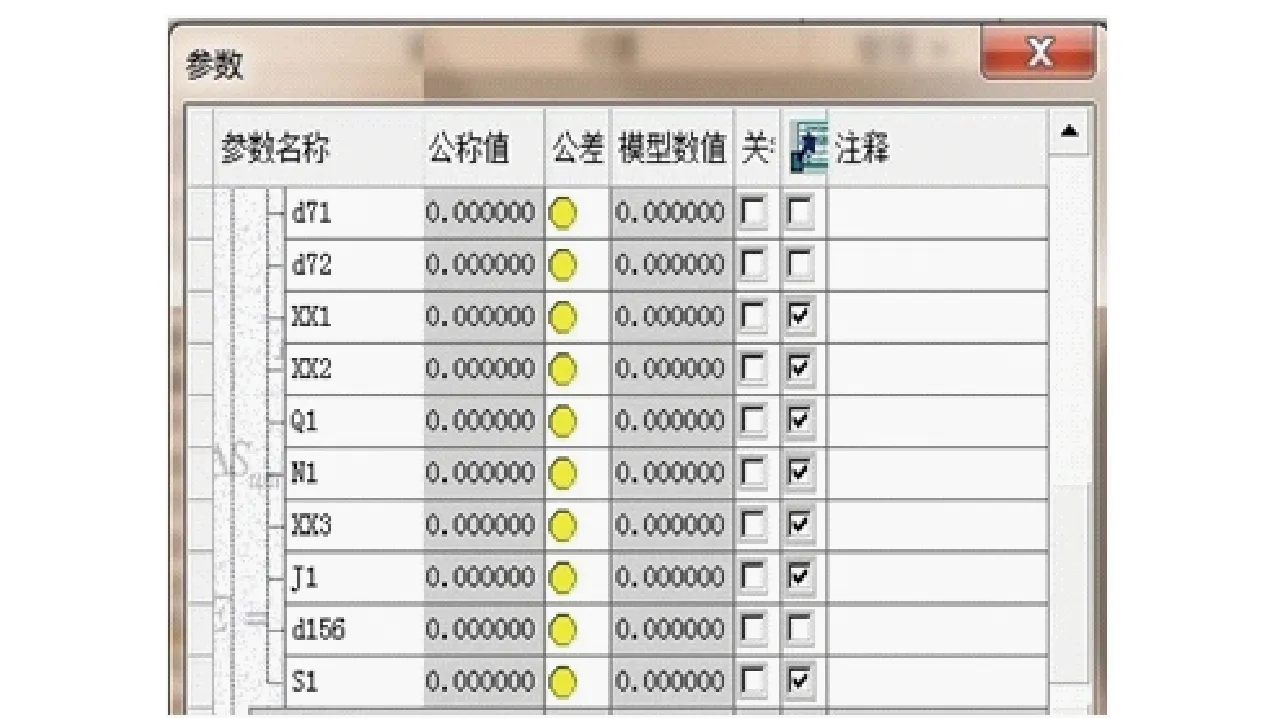
图7 Inventor参数动画制作之参数设定布置图

图8 Inventor参数动画制作之各参数动画的时间位置设置图
(3)进入Inventor Studio界面对动画激活后,先定动画总时间T(60秒),并将整个动画设计成4个时间段,即依次为“0—T1”10秒、“T1—T2”20秒、“T2—T3”20秒、“T3—T4”10秒,其中0、T1、T2、T3、T4分别为5个时间点,然后调出“动画时间轴”点开“展开操作编辑器”后,用“位置表达动画”设计将4个位置即“主要”、“位置1”、“位置2”、“主要”设置到相应的时间轴位置,这样就构架出了整个动画的全部框架,然后进行“参数动画”设计,按表1对各部件进行相应的参数动画设置即可(如图8所示)。

表1 Inventor参数动画中各模型动作的时间及位置控制表
说明:①表内参数S1和S2由角度表示,具体数值取当部件发生干涉时的角度即可;
②其它参数皆用转速表示,具体数值用轮系公式和本文后面介绍的相对转动原理得出的公式(1)、(2)、(3)即可算出。
③中心轮1转速尽量取低些,可以清晰观察各转动部件的运动状态。
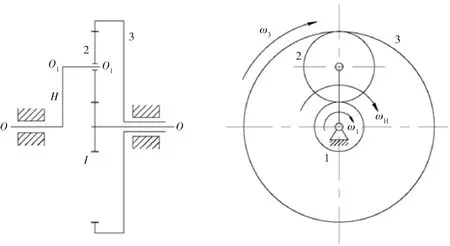
图9 差动轮系结构及运动原理图
在Studio界面中,在对各参数值及转向确认后,即可完成运动仿真动画制作,然后驱动动画,若运动达到要求,渲染动画,制作成视频存盘,至此运动仿真模拟制作完成。过程中须注意两点:
(1)各部件转动的传动比和转向要正确,否则,运动仿真会失真;
(2)位置参数设置要准确,否则,不同的运动前后联动不起来,也不易同时联动。
(本文的绞车三维机构运动仿真动图由于是视频格式,在本文中不能播放,具体见http://v.youku.com/v_show/id_XMzMzNTg2ODM4MA==.html?spm=a2h3j.8428770.3416059.1或http://www.jxcad.com.cn/forum.php?mod=viewthread&tid=1837351观看。)
3.3 绞车三维机构运动仿真分析及应用
通过运行Inventor制作的耙矿绞车主机传动机构的数字样机,真实还原设备内部结构组成,精确做到设备的运动仿真,显示各构件的运动特性,确定各构件的运动关系。
在本例中,主副卷筒分别直接与各自差动轮系中的系杆连接并由其带动做相应的转动,制动手柄直接控制两个差动轮系的内齿圈,两个差动轮系皆为2K- H型差动轮系(如图9所示),自由度为2,2K- H型差动轮系传动比及转向计算。
太阳轮(中心轮):齿轮1和齿轮3;
行星轮:齿轮2;
行星架(系杆):构件H;
转速分别为:n1,n3,n2,nH;
根据相对转动原理可得:
(1)
(2)
(3)
因为n3转向不定,所以nH转向不能确定,根据实际形态确定。

数字样机模拟耙矿绞车运动仿真:
运动驱动保证:全过程中两套差动轮系的中心轮在电动机的驱动下保持转速和转向(顺时针)不变,平稳转动,为运动的输入端,主副卷筒分别与对应差动轮系行星架(系杆H)联动,为运动的输出端。图5背景端为耙斗工作现场,即卷筒顺时针转动为收绳,逆时针为放绳。
(1)主副制动均未执行(如图5所示)

(2)主制动执行副制动未执行(如图10所示)
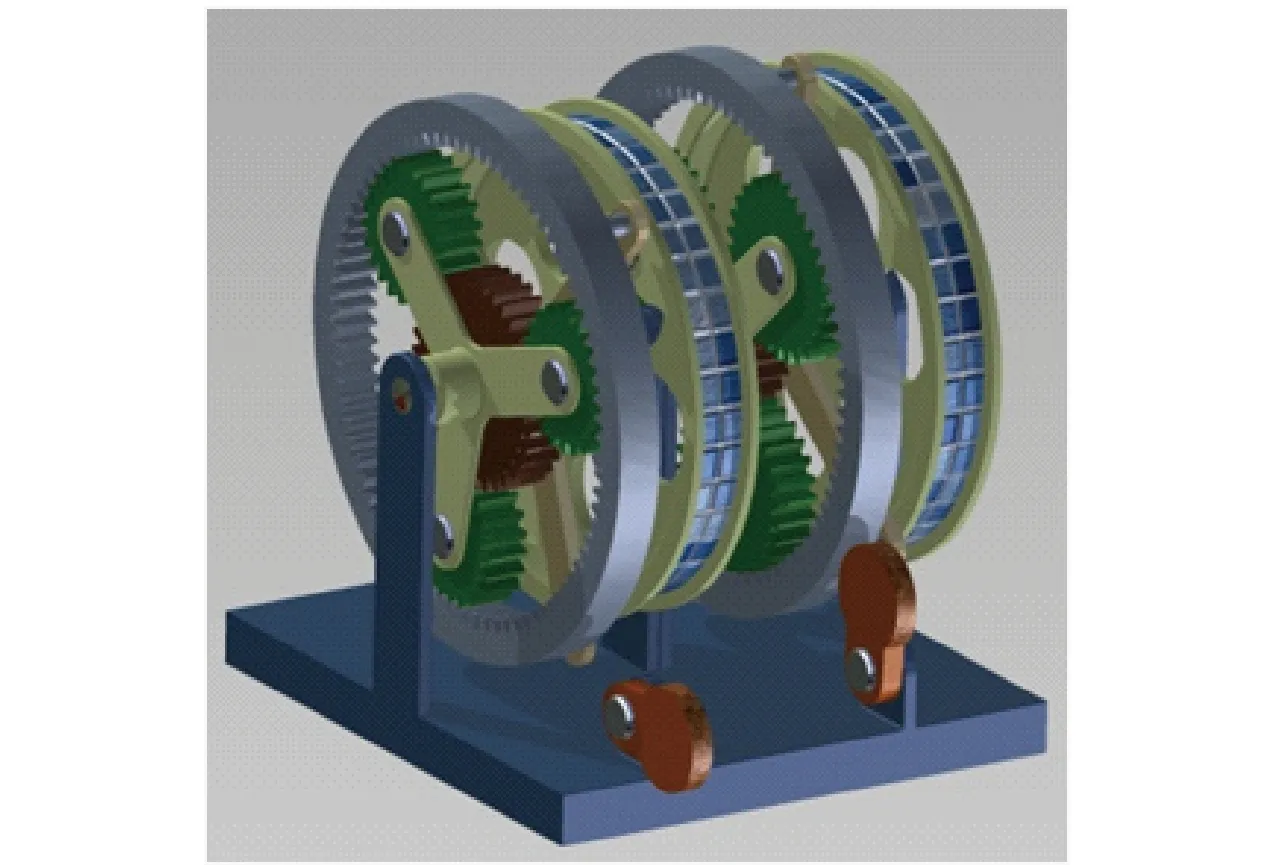
图10 主制动执行副制动未执行运动仿真演示图
内齿圈不转则行星齿轮既保持自转(逆时针)又要沿着内齿圈公转(顺时针),带动系杆H转动,相应主卷筒承受系统输入端的转矩并按相应的(定轴轮系)传动比转动(顺时针);副卷筒在钢丝绳作用下被动转动,其转速同主卷筒但转向相反,副内齿圈按新的传动比转动(按公式3计算),转向仍与其主动的中心齿轮转向相同,主副差动轮系的各行星齿轮既有自转又有公转,此时,主卷筒收绳,副卷筒放绳,耙斗现场耙矿,运动方向逐渐靠近绞车。
(3)主制动脱开副制动执行(如图11所示)
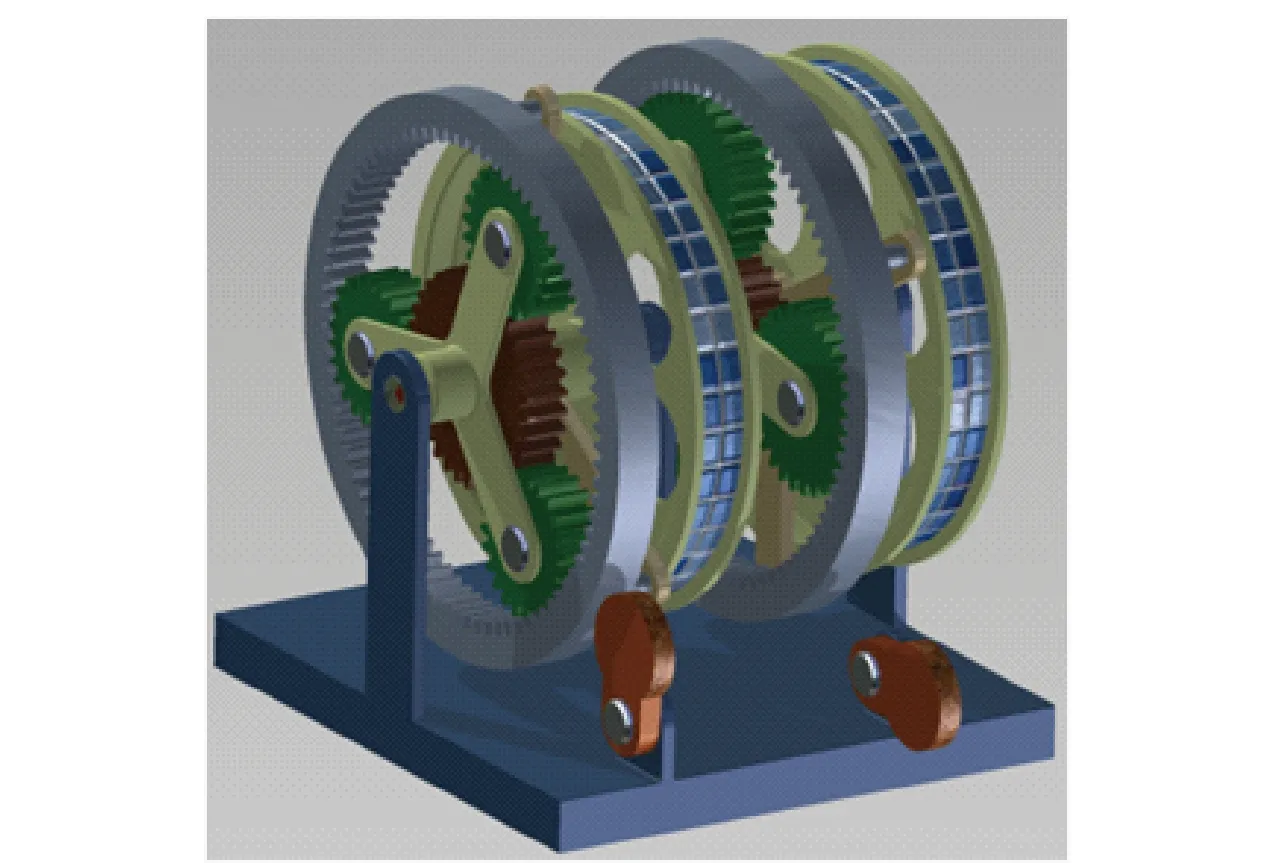
图11 主制动未执行副制动执行运动仿真演示图

(4)主副制动全部脱开(同运动(1),略)
在井下现场通过不断交替重复耙矿绞车的运动(2)和(3),来完成耙矿工作。
运动仿真应用:在将录制的耙矿绞车三维机构运动仿真视频放给维修人员看后,多数人反映,在看了视频2~4遍后,已经大概弄明白设备内部运转原理,认为这样的视频很直观,容易理解,并表示在后面的设备故障检修中就容易上手了,从而能减少设备检修时间并相应的提高检修效率,进而达到进行设备三维运动仿真的目的。
总之,利用Inventor软件建立模拟数字样机,通过运动仿真进行动画演示,能清晰表达出机构运动的原理及运动状况,使人快速领悟复杂机构的运动。
4 结语
利用Inventor 软件的“驱动约束”模块可以模拟实现耙矿绞车主机差动轮系的运动过程;使用Inventor的参数驱动可以建立起约束主动变量与其他变量之间的关联关系,实现多个动作的同时驱动或动作按先后顺序驱动。由于这些模拟过程无须编程或编写代码,因而显得更加方便快捷、不易出错。将该方法用于耙矿绞车的主机运动分析中,则可以通过制作的三维运动仿真模拟视频,便可以方便而直观地了解复杂的差动轮系结构和工作原理,从而能提高检修工作效率,降低检修成本,还有助于修理人员学习了解设备等工作的开展。
