基于步进电机的位移促动器设计与实测*
2019-07-16张宗猛王正兰杨德华吴常铖金振宇
张宗猛,王正兰,杨德华,吴常铖,金振宇
(1. 南京航空航天大学自动化学院,江苏 南京 211106;2. 中国科学院云南天文台,云南 昆明 650011)
对于中国科学院云南天文台2 m环形太阳望远镜[1-4]主镜的轴向位置及倾斜姿态的调整和定位,本文设计了一种基于步进电机的位移促动器。位移促动器作为主镜面的支撑和调节机构,是整个装置的核心部件之一,是一种精密的直线位移输出装置[5-6]。鉴于主镜面的面形需要达到环形太阳望远镜的成像要求,位移促动器需要具有较高的位移输出精度、大负载能力、高刚度以及毫米级有效行程。在环形太阳望远镜的主镜支撑调整技术中,位移促动器不仅需要实现稳定的位移输出,而且还要克服或减少摩擦、间隙和空回等不利因素。目前,已经建成的太阳望远镜都采用自行研制的位移促动器[7-8]。
针对2 m环形太阳望远镜对位移促动器的性能要求,设计一种基于步进电机的位移促动器对主镜镜面进行支撑和调节,并对设计的促动器进行性能测试实验,开展行程及线性度测试、位移促动器开环测试、输出分辨率测试、空回测试和位移闭环精度测试,获得了位移促动器的性能指标。
1 位移促动器设计
1.1 位移促动器设计指标
2 m环形太阳望远镜的镜面与传统的全口径镜面的设计指标有所差异,而且环形主镜对定位支撑系统和姿态调整系统的灵活性和精准性要求更高。表1是2 m环形太阳望远镜位移促动器的初步设计指标。
位移促动器要对主镜起支撑和调整的作用,因此位移促动器最大负荷应大于200 N。为了满足驱动电机在开环状态下的行程需要,位移促动器的位移总行程范围 ±2 mm,还需要满足位移促动器的校正能力,因此需要输出位移分辨率不大于1 μm,位移闭环精度不大于1 μm。
表1 位移促动器设计指标要求
Table 1 Displacement actuator designindex requirements
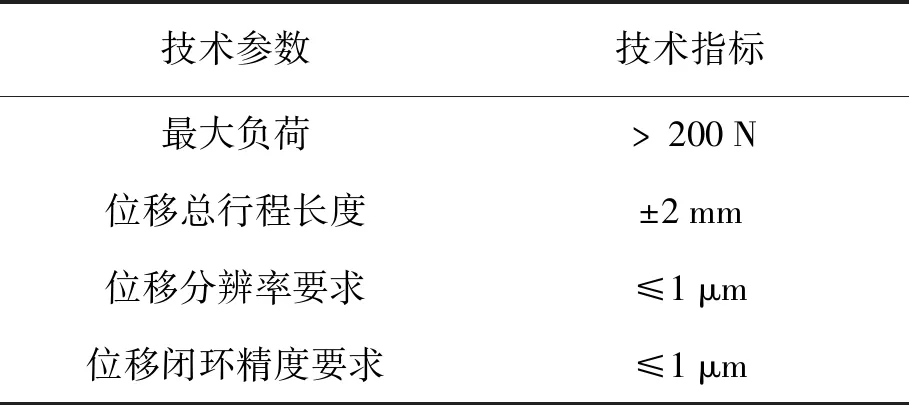
技术参数技术指标最大负荷﹥200N位移总行程长度±2mm位移分辨率要求≤1μm位移闭环精度要求≤1μm
1.2 位移促动器的结构形式
位移促动器输出位移能同时满足大行程、高精度、高负载等技术要求,常用的大行程、高精度微位移促动器的结构形式主要有3 种:
(1)位移缩放式。此类微位移促动器的结构形式是在驱动元件后附加位移缩放机构,位移缩放机构主要有减速器、液压减速机构、精密丝杠和柔性铰链等。对于位移缩放机构的优劣,可以从传动比、空回、响应速度、负载能力等几方面衡量。
(2)尺蠖式。尺蠖式微位移促动器是基于 “箝位-驱动-箝位” 的运动形式,以压电陶瓷、磁致伸缩材料、形状记忆合金等元件进行驱动。这类驱动元件精度高、响应快,构成的尺蠖式微位移促动器理论上可以获得无限大的有效行程,但是尺蠖式微位移促动器的控制比较复杂,并且成熟的商品很少。
(3)宏/微动叠加式。宏/微动叠加式微位移促动器分为宏动部分和微动部分,宏动部分完成大行程微米级定位,微动部分完成小范围的纳米级定位。这种促动器的缺点是机械结构和控制系统都较为复杂[9]。
相比(2)和(3)两种结构形式的微位移促动器,位移缩放式微位移促动器的结构比较简单,控制也较为方便,通过对驱动元件和位移缩放机构的组合,可以在大行程内输出较高精度的位移。结合表1位移促动器设计指标要求,此设计的微位移促动器采用位移缩放的结构形式。
1.3 位移促动器设计方案
位移促动器设计图见图1(a),为实现高精度控制、微位移校准,采用步进电机集成行星减速器作为核心驱动元件。步进电机和位移促动器外壳均通过法兰对外联接紧固在镜室上。步进电机输出轴采用紧定螺钉与转动螺母固连,转动螺母通过轴承安装于位移促动器外壳内,与之配合一直动螺杆,牙距1 mm。直动螺杆上段设置有导向机构,这样就将步进电机输出的旋转运动转换为直动螺杆的直线运动。由于位移促动器内部导杆,步进电机机构不可避免地存在回程间隙、空回等现象,结构设计中加入了一根弹性元件预紧弹簧对轴向直线运动杆件预紧,预紧元件可吸收很大的能量,消除或缓解振动,消除间隙。直动螺杆上端为位移输出端,安装了一只拉压力传感器作为位移促动器负载的实时检测元件,并在力传感器的上端设置位移输出接口。为实时检测位移促动器的输出位移,又集成了一只位移传感器线性可变差动变压器(Linear Variable Differential Transformer, LVDT),它的安装座与位移促动器外壳固连,同时设置了一根横梁,横梁的一端与位移促动器输出接口固连,另一端的下侧与线性可变差动变压器上端球头触点接触。图1(b)为位移促动器的三维结构图。图1(c)为位移促动器的实物图。
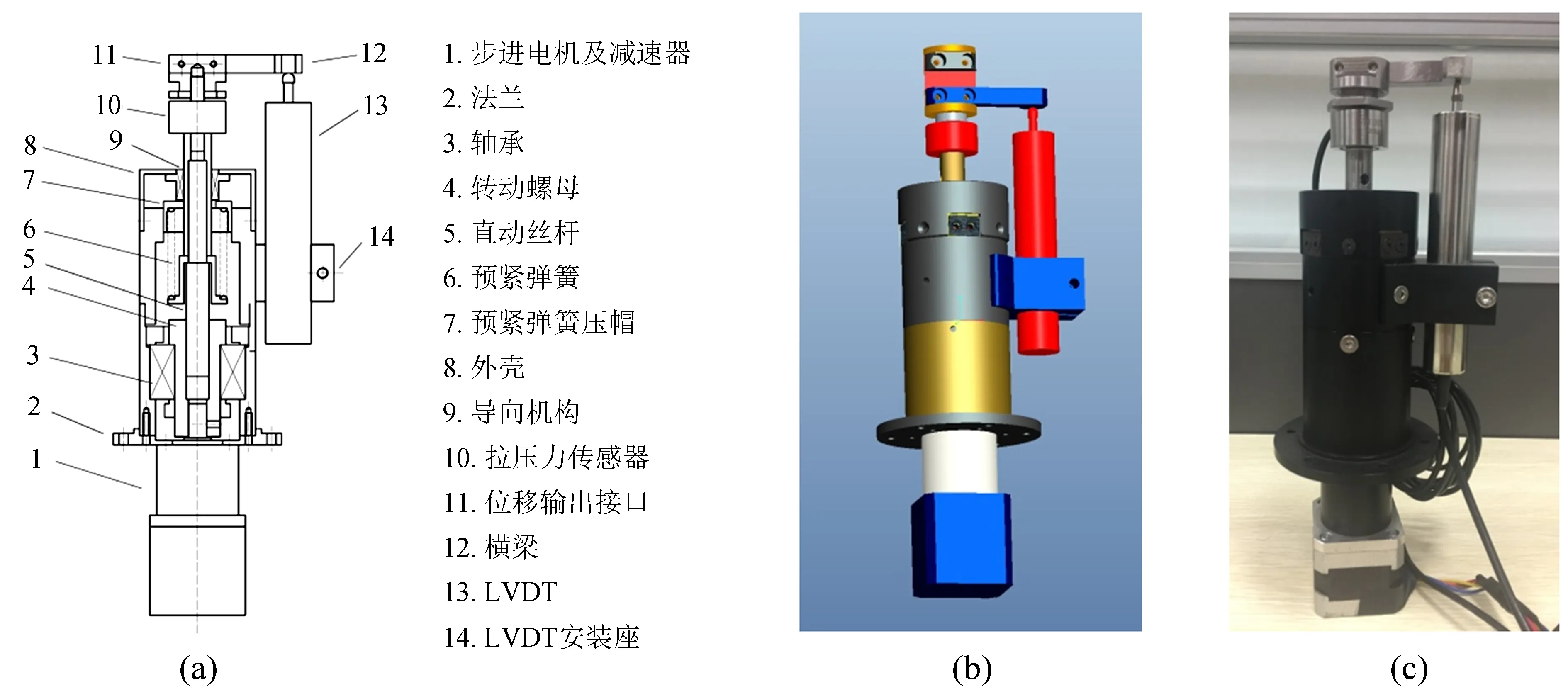
图1(a) 位移促动器设计图;(b) 位移促动器三维结构图;(c) 位移促动器的实物图
Fig.1(a) Design of displacement actuator; (b) 3D structure of displacement actuator;(c) Physical of displacement actuator
2 位移促动器的性能测试
对位移促动器进行全面的性能测试实验。实验过程中,将位移促动器安装在测试平台进行实验。
2.1 行程及线性度测试
由于驱动电机、导向机构存在间隙、空回、摩擦等非线性因素,对位移促动器开展了输出线性度测试。如图2,将位移促动器安装在测试平台上进行位移促动器线性度检测。让驱动电机开环状态下按设计目标行程(-2~+2 mm)从中间平衡位置开环运行,激光位移传感器(Keyence H050,测量范围0~10 mm,线性度±0.02%FS,重复定位精度25 nm)记录实际全量程输出位移轨迹,分析线性度,如图3。

图2 位移促动器安装图
Fig.2 Displacement actuator mounting platform

图3 位移促动器线性度测试曲线
Fig.3 Displacement actuator linearity test curve
测试结果表明,位移促动器可以实现正、反向全量程范围驱动。线性拟合下残差的极大值0.015 mm,在全量程范围内,正、反向输出线性度良好。
2.2 位移促动器开环测试
因为线性可变差动变压器的精度直接影响主镜位置检测的精度,所以对于线性可变差动变压器的数值进行标定至关重要。设计选用的线性可变差动变压器线性误差输出为0.5%FS。
实验中,位移促动器从行程0 mm运动到5 mm处,用线性可变差动变压器读取采样记录位置的变化情况。位移促动器误差曲线如图4,可以判断螺纹全长上螺距不均匀。
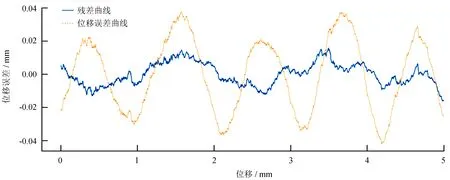
图4 线性可变差动变压器标定误差曲线
Fig.4 LVDT calibration error curve
采用傅里叶拟合,尝试对位移误差进行校正补偿,拟取误差位移函数解析式如(1)式。经拟合得到相应各系数如表2。
f(x)=a0sin(0.01x+b0)+c0cos(0.01x+d0)+a1sin(0.012x+b1)+
c1cos(0.012x+d1)+a2sin(0.015x+b2)+c2cos(0.015x+d2)+
(1)
a3sin(0.018x+b3)+c3cos(0.018x+d3)+e
线性可变差动变压器标定误差曲线见图4,残差极限最大值为0.015 9 mm,最小值为-0.016 2 mm;残差的均方根为0.006 7。造成这样的误差是由于位移促动器开环控制精度不理想,因此要进行闭环控制校正。
2.3 输出分辨率测试
分辨率测试的目的是测量位移促动器的校正能力,即最小的可控步长。以下通过对位移促动器施加轴向负载,测试拉伸或压缩情况下位移促动器的输出分辨率。
(1)轴向施加压力测试
测试的实验平台如图5。位移促动器在轴向对其施加2 kg负载时输出分辨率测试曲线如图6。由图6可知,位移促动器在负载2 kg时分辨率可以达到0.6 μm步长,实现分辨率小于1 μm的技术要求。
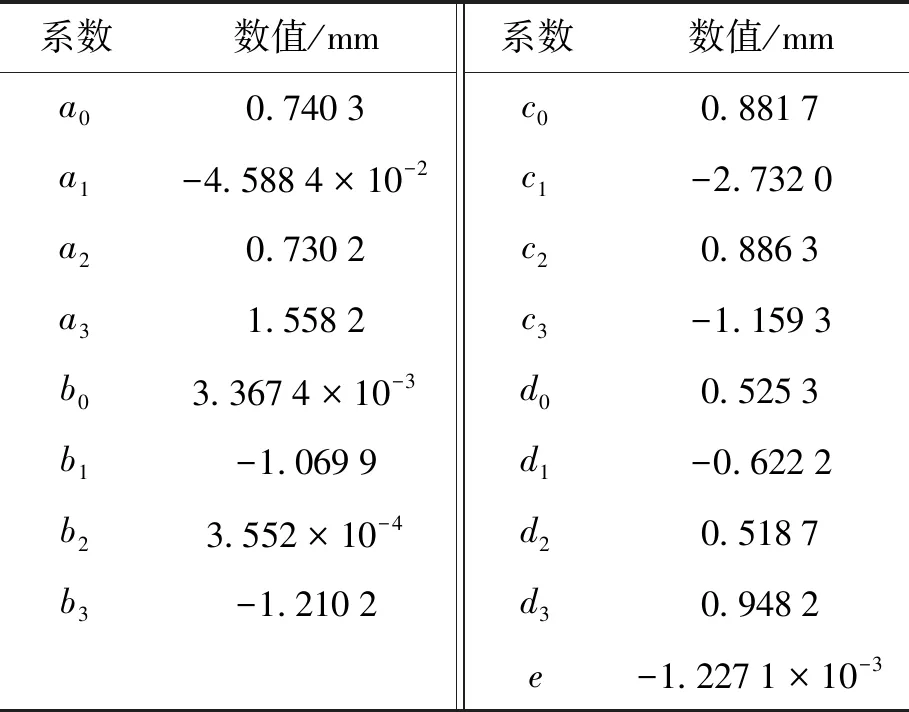
表2 解析式相应系数

图5 压力测试实验平台
Fig.5 Stress test experimental platform
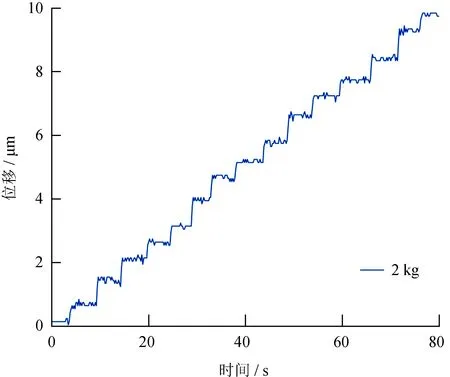
图6 位移输出分辨率轴向压力测试曲线
Fig.6 Displacement output resolution axial pressure test curve
(2)轴向施加拉力测试
对轴向施加拉力测试时构建的实验平台如图7。在1 kg负载下对位移促动器在轴向施加拉力得到输出分辨率测试曲线如图8。由图8可知,位移促动器在施加轴向拉力、负载为1 kg时输出位移分辨率可达0.4 μm,可以满足设计指标小于1 μm的要求。
理论上无细分时分辨率为100 nm/step,上述采用二细分处理,由图6和图8可知,还可以进行再细分处理。15个单独步进量所走位移行程不一致是由于电机间隙、摩擦等原因造成。
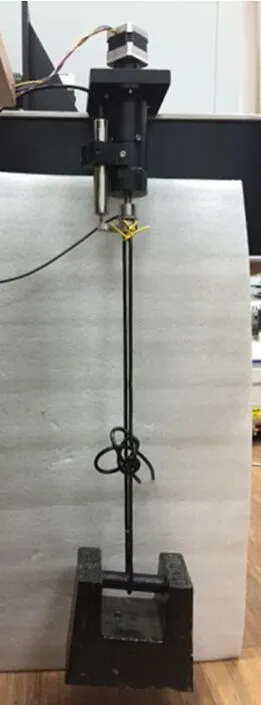
图7 拉力测试实验平台
Fig.7 Pull test experimental platform

图8 位移输出分辨率轴向拉力测试曲线
Fig.8 Displacement output resolution axial pull test curve
2.4 空回测试
位移促动器在2 kg压力负载下,位于0.1 mm这一点上,发出一个步进脉冲。然后,再从最终位置发出与先前步长和步进次数都相同的反向运动,最终得到位置误差。得到的空回测试曲线如图9。由图9可知,中间位置上方0.1 mm处的位置误差为4.1 μm,这是由于步进电机中螺纹全长上螺距不均匀和在负载状况下结构弹性变形造成的。这也说明位移促动器开环控制精度不高,需要闭环控制进行校正。
2.5 位移闭环精度测试
根据2.3节输出分辨率测试分析可得,位移促动器处于不同轴向拉力、压力下开环控制分辨率均优于0.6 μm。基于这个结论,开展了位移促动器闭环测试。即输出目标位移,通过驱动控制系统开环控制电机步进量,线性可变差动变压器位移传感器实时监测位移步进量反馈回控制系统与目标位移比对,实现位移闭环输出。

图9 负载下空回测试曲线
Fig.9 Empty return test curve under load
根据测试,位移促动器能够实现目标位移闭环输出精度优于1 μm,符合技术指标要求。
3 结 论
本文设计了一种基于步进电机的位移促动器,并进行一系列性能测试。测试结果表明,该位移促动器输出位移线性度良好,满足轴向位移 ±2 mm行程要求,螺纹间隙为5 μm左右。开环控制下的分辨率优于0.6 μm,达到设计指标小于1 μm的分辨率要求。位移闭环精度可以实现技术指标优于1 μm的要求。但螺纹间距不均匀导致开环控制精度不理想,想要达到高精度位移调整与定位,实验系统仍需采用位移闭环实现校正。测试结果验证了该位移促动器原理和结构简单,安装维护工艺良好,达到设计指标,为2 m环形望远镜主镜轴向支撑和调整提供技术参考。