傅立叶变换型线偏振干涉成像系统分析与设计
2019-07-12王洪亮梁静秋梁中翥王维彪吕金光秦余欣
王洪亮,梁静秋,梁中翥,王维彪,吕金光,秦余欣
(1.中国科学院 长春光学精密机械与物理研究所 应用光学国家重点实验室,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引 言
偏振干涉成像系统能够同时获取被测目标的图像信息、光谱信息和空间偏振态信息,为目标的准确识别提供了有力的证据,广泛应用于生物医学[1-6]、大气测量[7-12]和遥感[13-17]等领域。
传统的偏振干涉成像系统多采用声光或液晶调制器[18-19]作为光谱滤光片和线偏振元件,系统结构简单,但辐射通量较低。另一种是基于色散元件的通道型光谱偏振成像系统[20-21],其具有较好的实时性,但由于需要二次傅立叶变换,增加了系统数据还原的计算量。
随着傅立叶变换光谱技术的发展,具有信息量多、光通量大、光谱通道多等诸多优点的傅立叶变换偏振干涉成像系统成为研究热点。2001年,美国海军研究生院研制了基于Saganac干涉结构的高分辨率偏振干涉成像系统[22]。2010年,西安交通大学研制了干涉模块为双折射晶体的通道型偏振干涉成像系统[23]。2016年,西安空间光学研究所研制了基于孔径分割与视场分割的偏振干涉成像系统。该系统利用Wollaston棱镜和Savart偏光镜实现分通道的偏振调制,最后在单一探测器上获得用于解调偏振信息的干涉图像[24]。迄今为止,所研究的傅立叶变换偏振干涉成像系统主要集中在可见波段,对中波红外系统报道较少。
为了实现在中波红外波段高空间分辨率的偏振干涉测量,本文提出并设计了一种基于微型静态干涉模块的新型中波红外线偏振干涉成像系统,对系统的透过率进行了分析。为了实现准确的偏振测量,对系统的偏振测量矩阵进行了优化。
2 工作原理与系统设计
2.1 系统的工作原理
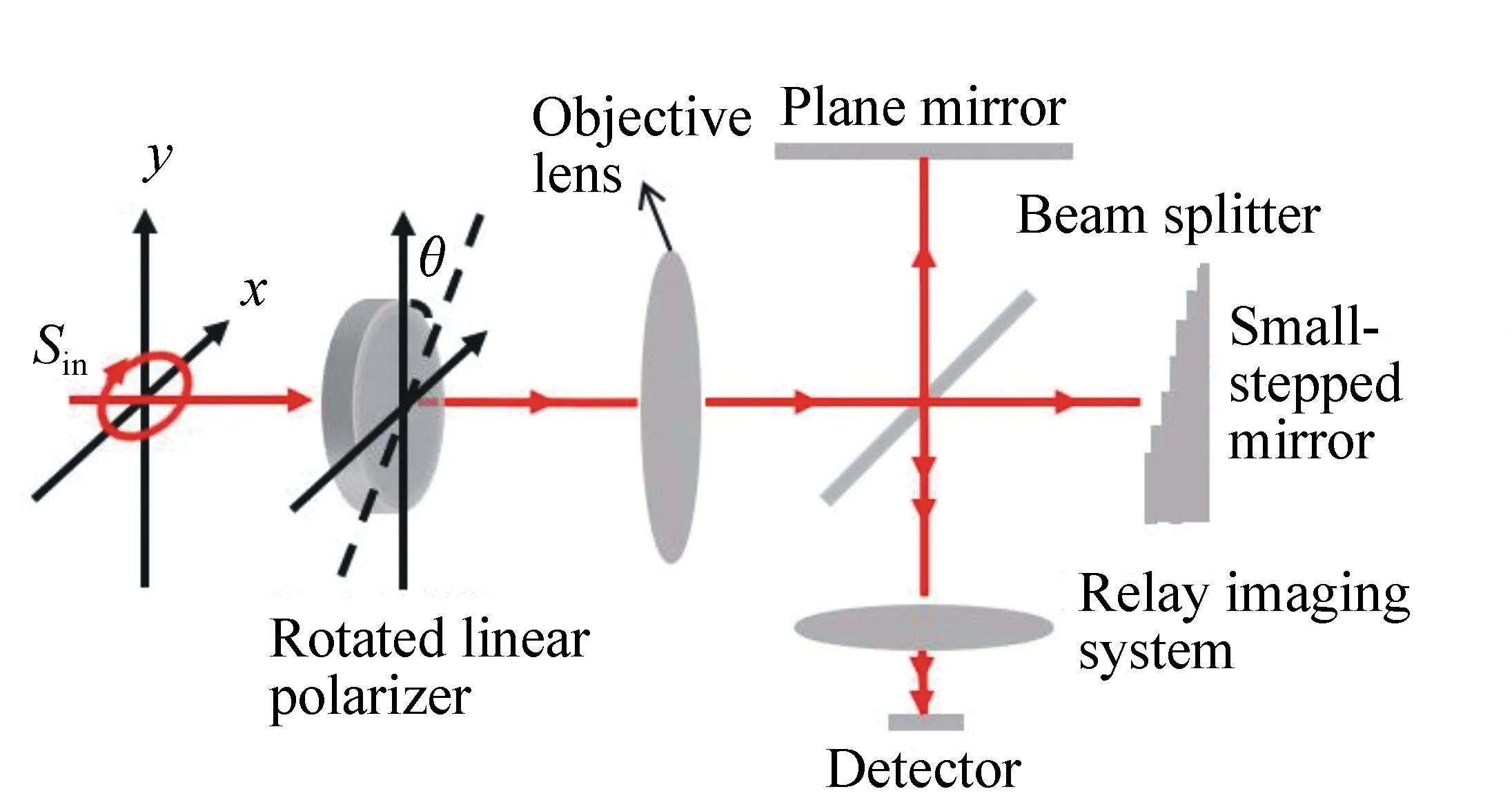
图1 MWIRFTLPIIS原理图Fig.1 Principle diagram of the MWIRFTLPIIS
中波红外傅立叶变换型线偏振干涉成像系统(MWIRFTLPIIS)如图1所示,主要由分时偏振调制器、物镜、微型静态干涉模块、中继成像系统和探测器等部分构成。其中分时偏振调制器由旋转的线偏振片以及精密的转台控制系统组成,MWIR测量时通过改变线偏振片偏振轴的方向来实现不同方向的偏振调制。平面镜和多级微反射镜构成了微型静态干涉模块。
FTLPIIS的工作原理为:目标景物发出的光入射到某一偏振调制方向的分时偏振调制器,分时偏振调制器将入射光的偏振信息编码到图像I中,再经物镜和分束器分别成像在多级微反射镜和平面镜上。通过中继成像系统将平面镜和多级微反射镜的像成像在探测器上并发生干涉,最终在探测器的靶面上获得某一偏振调制方向的目标物体的干涉图像I′,其表达式如下:
I′=0.5I[1+cos(2πνδ)]=0.5·C·I,
(1)

(2)
式中,系数C=1+cos(2πνδ),ν是入射光的频率,δ是阶梯镜产生的光程差,S0、S1、S2是目标景物的线斯托克斯矢量Sin的3个分量,S0表示总的光强信息,S1、S2表示目标景物的线偏振信息,θ是线偏振片的偏振轴和x轴的夹角。
在某一偏振调制角度下,随着MWIRFTLPIIS对目标物体的推扫,在下一时刻目标物体会以另外一个视场角进入系统,成像在相邻的阶梯反射面上。在一个窗扫模式之内,就能完成地面目标物体在所有阶梯反射面上的成像。通过对所获得的多帧图像进行剪切和拼接,即可得到目标的图像信息和干涉信息。通过对干涉图进行离散傅立叶变换,即可获得地面目标物体的光谱信息。
为了获得目标景物的线斯托克斯矢量信息,需旋转线性偏振片至3个不同的角度,由此可得到同一目标景物不同偏振调制的干涉图像序列和其斯托克斯矢量之间的关系:
(3)
式中,A是偏振测量矩阵。
根据式(3)可求得入射光的斯托克斯矢量:
(4)
式中,B是偏振测量矩阵A的逆矩阵。
通过求得的斯托克斯矢量Sin,可以得到目标的线偏振度dolp以及偏振角Ψ:
(5)
2.2 MWIRFTLPIIS系统设计
红外光学系统是对热源进行热成像,为了避免场景之外的杂散光进入光学系统影响成像效果,将制冷型面阵探测器的冷光阑作为系统的孔径光阑,以实现100%的冷光阑匹配。同时,考虑到微型静态干涉模块具有光程差空间调制的特点以及垂直光轴放置的红外偏振片可能会导致系统冷反射的问题,MWIRFTLPIIS采用二次成像的设计方法,如图2所示。
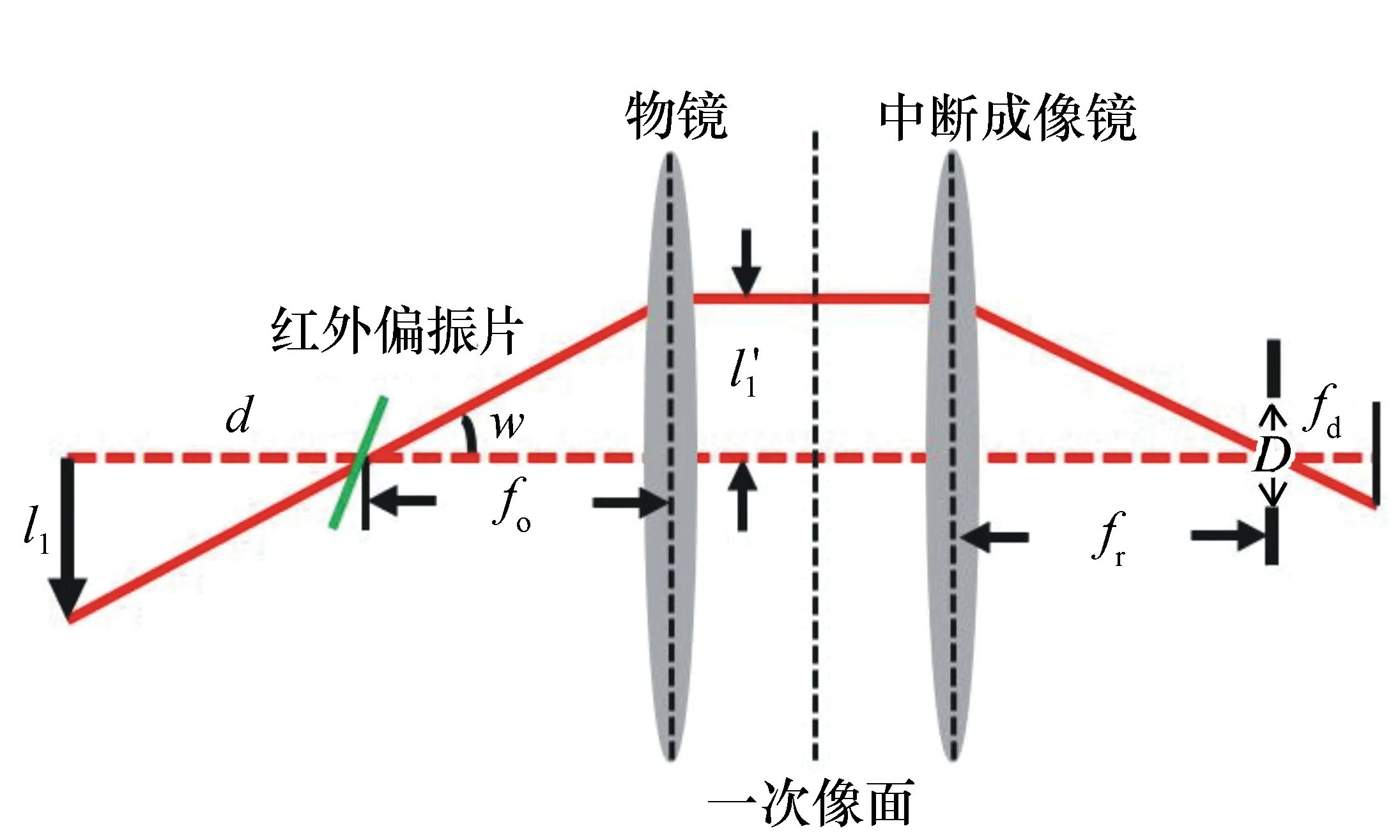
图2 MWIRFTLPIIS的等效光路图Fig.2 Equivalent optical path diagram of the MWIRFTLPIIS
根据近轴光学理论,可得到如下关系:
(6)
式中,fo为物镜的焦距,f为MWIRFTLPIIS系统的焦距,Ls为系统的总长,fd为探测器的冷光阑到探测器焦平面的距离,fr为中继成像系统的焦距,D为图2中探测器冷光阑的直径。
为满足一定的探测距离d和探测范围l1,根据图2的几何关系,可得物镜的物方视场为:
(7)
中继成像系统将探测器的冷光阑作为其孔径光阑,则中继成像光学系统的像方孔径角为:
(8)
考虑到光学系统的紧凑性,根据公式(6)~(8)可得光学系统的初始结构参数如表1所示。
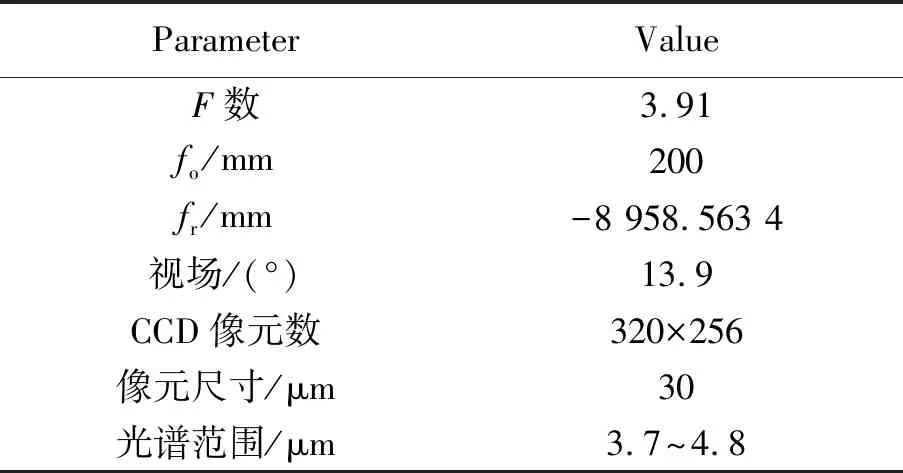
表1 MWIRFTLPIIS的初始结构参数Tab.1 Initial structural parameters of the MWIRFTLPIIS
设计完成的物镜和中继成像系统结构如图3、4所示,对应的调制传递函数如图5、6所示。

图3 物镜的光学结构图Fig.3 Optical structure diagram of objective lens
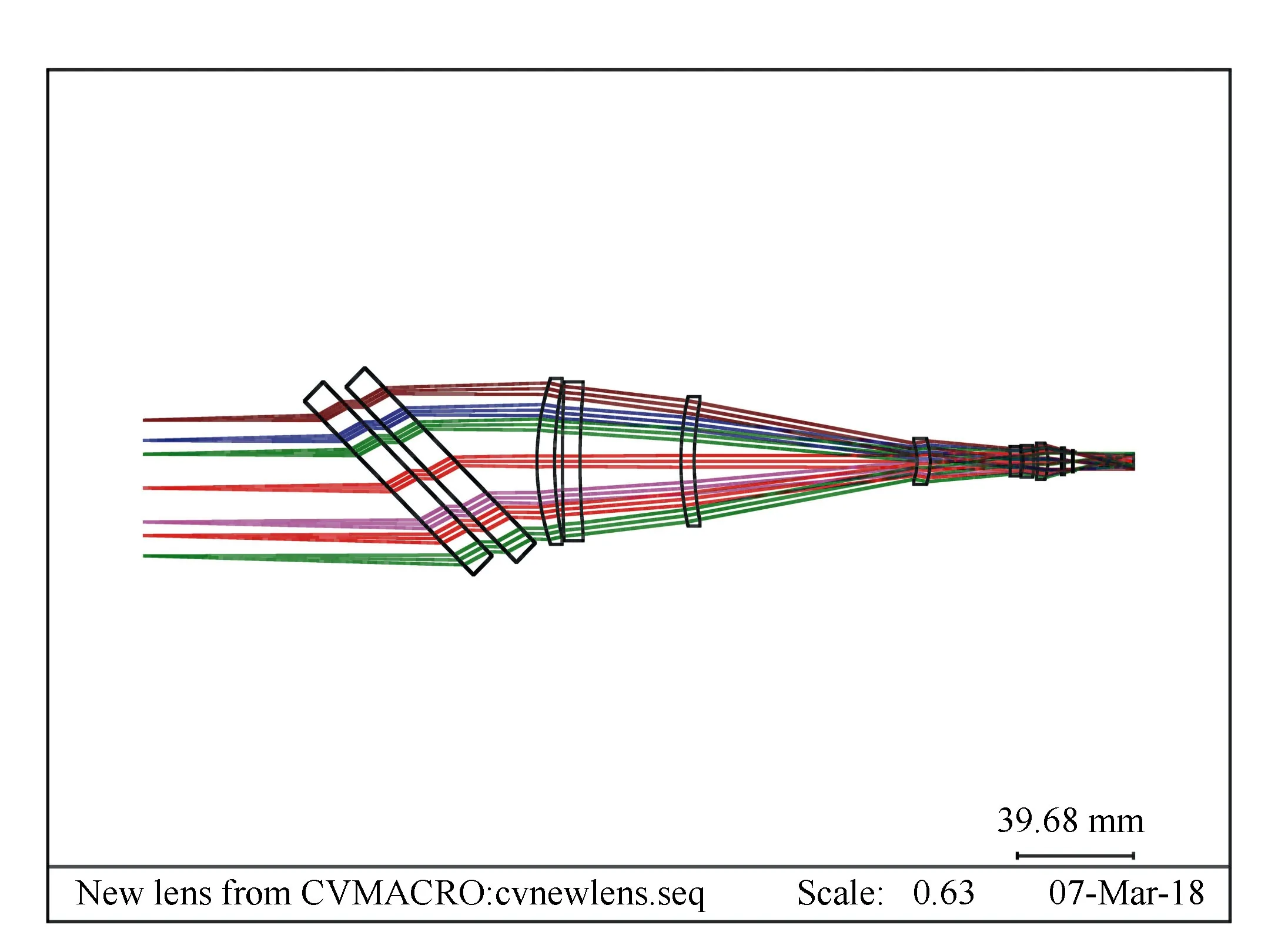
图4 中继成像系统的光学结构图Fig.4 Optical structure diagram of relay imaging system
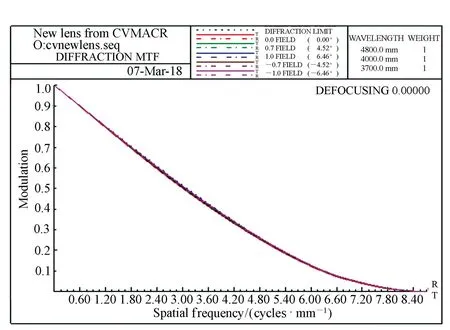
图5 物镜的调制传递函数Fig.5 MTF of the objective lens
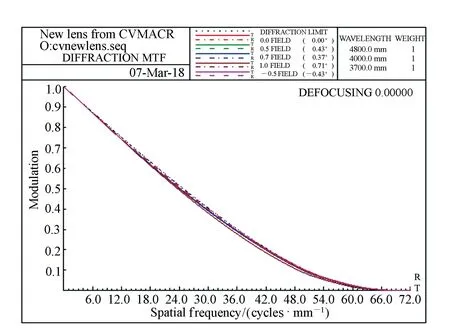
图6 中继成像系统的调制传递函数Fig.6 MTF of the relay imaging system
从图5和图6可以看出,物镜和中继成像系统的成像质量良好,其对应的各视场调制传递函数均接近衍射极限。
2.3 MWIRFTLPIIS的性能分析
MWIRFTLPIIS采用基于多级微反射镜的静态干涉系统结构和二次成像的设计方法,因此有必要对整体系统的成像性能进行分析。
由于多级微反射镜的各子反射面位于不同的位置,因此设计时需要使各阶梯子反射面均位于物镜的焦深和中继成像系统的景深范围内。图7为设计物镜的离焦点列图,图8为当中继成像系统的物面位于不同的阶梯反射面时,中继成像系统在探测器特征频率17 lp/mm处的调制传递函数值的变化。

图7 物镜的离焦点列图Fig.7 Defocusing spot diagram of the objective lens

图8 中继成像系统在探测器特征频率处MTF的变化Fig.8 MTF′s change of the relay imaging system in the characteristic frequency of detector
从图7和图8可以看出,物镜的像面或中继成像系统的物面变化并未改变物镜和中继成像系统的成像性能,表明多级微反射镜的各子反射面均位于物镜的焦深和中继成像系统的景深范围内,物镜和中继成像系统的设计满足MWIRFTLPIIS的使用需求。
MWIRFTLPIIS采用二次成像的设计方法,因此对MWIRFTLPIIS的整体成像效果进行评价。MWIRFTLPIIS的等效光学结构和其对应的调制传递函数如图9和10所示。

图9 MWIRFTLPIIS的光线追迹图Fig.9 Ray tracing map of the MWIRFTLPIIS

图10 MWIRFTLPIIS的传递函数图Fig.10 MTF of the MWIRFTLPIIS
图10表明,MWIRFTLPIIS成像质量良好,在3.7~4.8 μm的工作波段内,各视场的调制传递函数均接近衍射极限。因此,MWIRFTLPIIS的设计满足系统的使用需求。
3 MWIRFTLPIIS的透过率分析
系统透过率是MWIRFTLPIIS的重要特征参数,它表征了系统获取信息的能力。本文通过分析入射光为非偏振光和线偏振光两种极端情况时MWIRFTLPIIS的透过率,评估系统获取信息的能力(在计算透过率的时候不考虑波长因素对透过率的影响)。
根据能量守恒定律,MWIRFTLPIIS各部分相关能量满足以下关系式:
It=Ir+Ia+Io,
(9)
式中,It为入射到MWIRFTLPIIS的总的光能量,Ir为光学面反射的光能量,Ia为光学介质吸收的光能量,Io为进入探测器的光能量。
当平行光沿着光轴入射到MWIRFTLPIIS时,其透过率满足以下关系式:
(10)

(11)

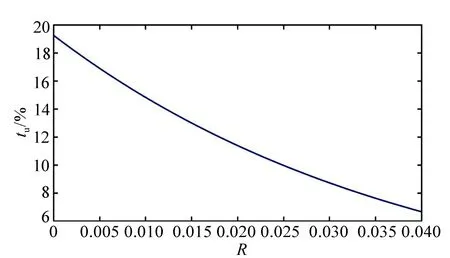
图11 完全非偏振光入射时系统透过率随反射率的变化曲线Fig.11 Transmission rate changes with the reflectivity when the unpolarized light incidents

图12 偏振光入射时系统透过率随反射率R和角度φ的变化情况Fig.12 Transmission rate changes with the reflectivity R and the angle φ when the polarized light incidents
由图11可以看出,当入射光为非偏振光时,MWIRFTLPIIS的最大透过率为19.25%。由图12可以看出,当入射光为完全偏振光时,最大的透过率为38.50%,当偏振片的偏振轴与x轴的夹角φ发生变化时,MWIRFTLPIIS透过率也发生变化。影响MWIRFTLPIIS透过率的主要因素是光学面的反射,光学介质的吸收以及光束两次经过分束器能量的损失。
目前,在光学加工中,光学表面的反射率可以降低到0.5%。由公式(10)和(11)可得,在非偏振和完全偏振的情况下,MWIRFTLPIIS的最大透过率分别为16.90%、33.80%。通常情况下,来自目标物体的入射光既不是非偏阵光也不是完全的线偏振光,MWIRFTLPIIS的透过率一般介于两者之间。根据这个计算结果,可以对MWIRFTLPIIS所能够探测的最小辐射强度进行评估。
4 偏振测量矩阵的优化与仿真论证
4.1 偏振测量矩阵的优化
为了提高偏振测量的准确性,有效抑制偏振测量探测强度的随机波动对偏振测量的影响,通常采用矩阵范数[25]和等权重方差(EWV)[26]等方法对偏振测量矩阵进行优化,本文采用EWV对偏振测量矩阵进行优化,其表达式如下:
(12)
其中,A+是偏振测量矩阵A的伪逆矩阵,N为偏振测量次数,Z是矩阵A的秩,μj为矩阵A的奇异值。等权重方差的值越小,则对噪声的抑制能力越强。

图13 A的等权重方差图Fig.13 EWV diagram of A
设分时偏振调制器旋转的3个角度分别为θ1、θ2、θ3。为了计算方便,令θ1=0°,则系统偏振测量矩阵A的EWV是θ2、θ3的函数,EWV随θ2、θ3变化如图13所示。从图13可以看出,当偏振片的偏振轴的旋转角度为0°,-60°,60°或0°,60°,-60°时,A的EWV值最小,为6.68,对噪声的抑制能力最强。
4.2 优化方法的仿真论证
为了验证优化方法的正确性,对偏振测量矩阵对噪声的抑制能力进行了评估。本文采用像元尺寸为30 μm×30 μm,像元数为320×250的制冷型碲镉汞面阵探测器,其主要噪声是高斯噪声。原始斯托克斯矢量如图14所示,像素数为51×51。在式(5)中加入均值为零,方差为0.1的高斯噪声,重构出的斯托克斯矢量的信噪比图像如图15和16所示。原始斯托克斯矢量图中中心区域的斯托克斯矢量Sc和外部区域的斯托克斯矢量So满足以下关系:
(13)

图14 原始的斯托克斯矢量Fig.14 Original linear Stokes vector

图15 S1的信噪比随θ3变化Fig.15 Signal-to-noise ratio of S1 varies with θ3
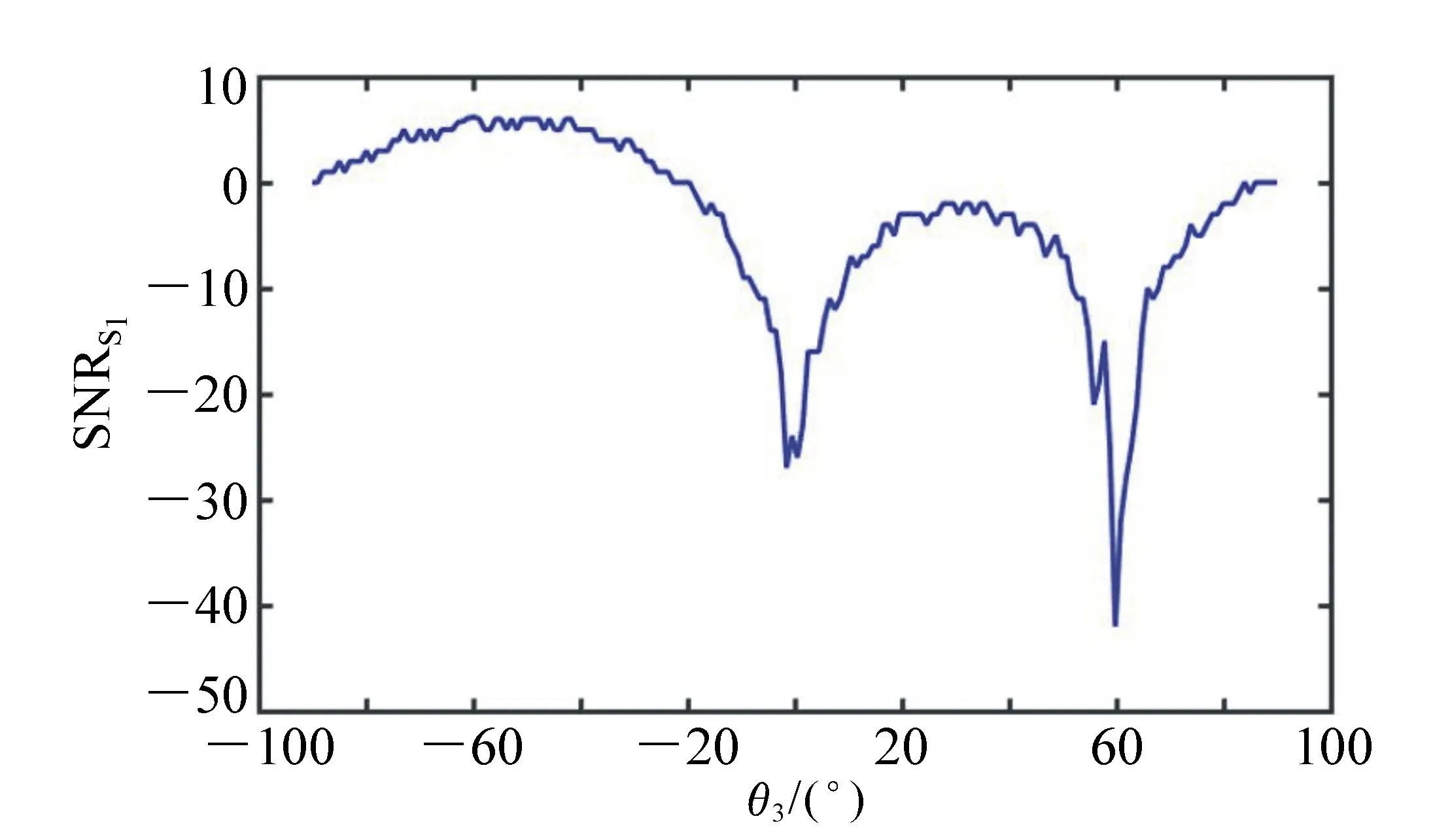
图16 S2的信噪比随θ3变化Fig.16 Signal-to-noise ratio of S2 varies with θ3
当θ1=0°,θ2=60°,θ3从-90°到90°变化时,重构的线偏振斯托克斯S1和S2的信噪比变化曲线如图15和16所示。可见,当θ3=-60°时,S1和S2的信噪比最大,与4.1节偏振测量矩阵的优化结果一致,证明了优化方法的正确性。
5 误差分析与公差容限
为了进一步提高偏振测量的准确性,对偏振元件偏振轴的旋转误差对偏振测量的影响进行了分析。
5.1 旋转误差对偏振测量的影响
由于本系统采用旋转线偏振片方式对入射光进行偏振调制,测量过程中偏振片的旋转误差是不可避免的,因此实际重构的斯托克斯矢量Sreal满足以下关系式:
Sreal=A-1·A′·Sin,
(14)
式中,A′为存在旋转误差的偏振测量矩阵。重构斯托克斯矢量误差ε为:
ε=Sreal-Sin=A-1·ΔA·Sin,
(15)
ξ=(ξ1,ξ2,ξ3)T,
(16)
式中,ΔA为误差矩阵,是测量矩阵A′和理想测量矩阵A之差,ξn为第n次测量时分时偏振调制器的旋转误差。如果ξn相对较小,根据泰勒展开,忽略高阶项,则ΔA可以表示为:
(17)
式中,θn是第n次测量时分时偏振调制器的旋转角度。
将式(17)带入到式(15)中可得到:
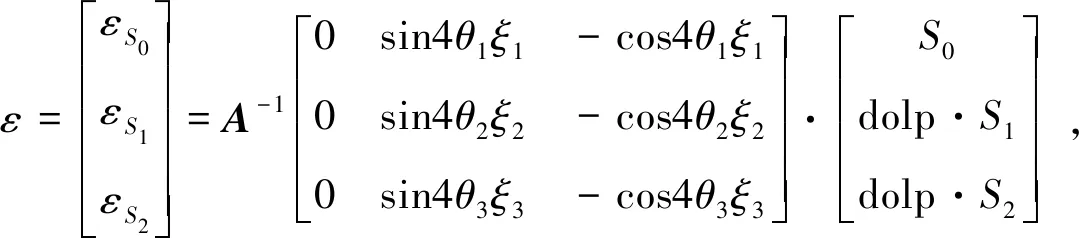
(18)
从上式可以看出,斯托克斯矢量的重构误差不仅与入射光的偏振态有关,还与系统的旋转误差有关。为了能够定量分析斯托克斯矢量的重构误差与入射光偏振片、偏振度之间的关系,根据斯托克斯矢量邦加球表示,对入射光偏振态进行螺旋线采样,采样点数为1 500,如图17(a)所示。
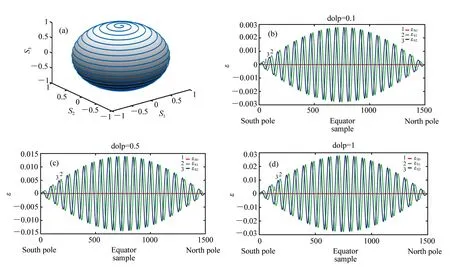
图17 (a)邦加球螺旋线采样; (b)dolp=0.1时线斯托克斯矢量的重构误差; (c)dolp=0.5时线斯托克斯矢量的重构误差; (d)dolp=1时线斯托克斯矢量的重构误差Fig.17 (a)Helix sampling of poincare; (b)reconstruction error of linear Stokes vector in dolp=0.1; (c)reconstruction error of linear Stokes vector in dolp=0.5; (d)reconstruction error of linear Stokes vector in dolp=1
当偏振片的旋转误差ξ1、ξ2、ξ3为0.8°时,,斯托克斯矢量的重构误差如图17(b)~17(d)所示。从图中可以看出,在任何偏振态的入射光入射以及分时偏振调制器存在旋转误差的情况下,总的入射光强即S0是不变的。在旋转误差一定的情况下,S1、S2的测量误差随入射光的偏振态以及偏振度发生变化。入射光的偏振度越高,其重构误差越大。其次,从图中可以看出在装配误差一定的情况下,位于赤道附近的偏振态,其重构的斯托克斯矢量误差最大,南北两极最小。
5.2 旋转公差分析
为了能够定量分析偏振片的旋转公差容限,可以将斯托克斯矢量的重构误差看作一个品质因数,其表达式为:
ErrorS1=max([max(εS0),max(εS1),
max(εS2)]),i=1,2,3 .
(19)
当偏振片的偏差角度θi分别为0.2°、0.5、1°、1.5°、2°时,线斯托克斯矢量的重构误差ErrorSi和偏差角度θi之间的关系如图18所示,可以看出它们之间成线性关系。为了能够保证重构出的斯托克斯矢量误差小于2%,则线偏振片的旋转公差容限应为0.84°。
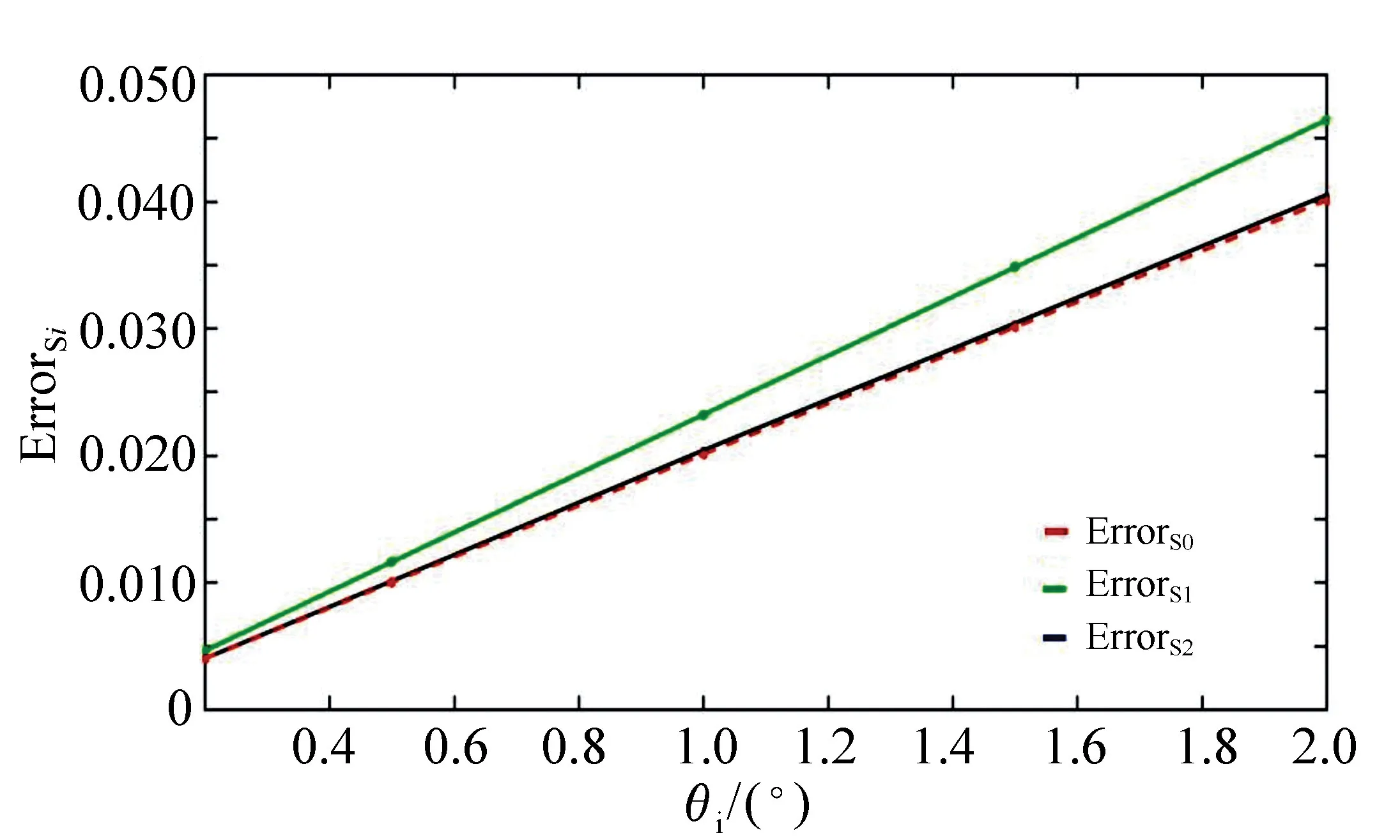
图18 斯托克斯矢量的重构误差ErrorSi和旋转角度偏差θi之间的关系Fig.18 Relationship between reconstruction error ErrorSi of Stokes vector and rotation angle deviation θi
6 结 论
本文提出了一种基于微型静态干涉模块的中波红外傅立变换线偏振干涉成像系统。根据系统特点和近轴光学理论,对系统进行了设计和优化。整体系统的成像性能和透过率特性的分析结果,表明系统的成像质量良好,可以满足仪器的使用需求。应用等权重方差优化方法优化了系统的偏振测量矩阵,降低了探测器强度的随机波动对偏振测量的影响,优化结果表明当偏振元件的偏振轴的角度为(0°,-60°,60°)时,重构的线斯托克斯矢量可以获得的信噪比最高。在偏振元件偏振轴的装配误差一定的情况下,分析了斯托克斯矢量的重构误差随着入射光偏振度的变化。为了保证重构出的斯托克斯矢量的重构误差小于2%,偏振片的旋转公差容限应小于0.84°。本研究对偏振干涉成像系统偏振信息的精确测量以及系统的工程应用具有参考价值。