用于引力波关键技术验证的近地低成本商业卫星设计
2019-07-12蔡志鸣侍行剑邓剑峰余金培李华旺
陈 琨,蔡志鸣,侍行剑,邓剑峰,余金培,李华旺
(中国科学院 微小卫星创新研究院,上海 浦东新区 201203)
1 引 言
2016年2月11日,美国地面激光干涉引力波天文台(LIGO)公布了直接探测到引力波的结果,证实了爱因斯坦广义相对论关于引力波存在的预言[1]。地面探测到引力波的消息极大地刺激了全世界对引力波探测及研究的热情,并且开创了一个新的研究方向——引力波天文学。引力波为人类进一步探索宇宙的起源、形成和演化提供了一种全新的观测手段,开创一个全新的观测宇宙的窗口,包括从宇宙大爆炸到黑洞,从中子星到白矮星双星,从宇宙的拓扑缺陷到暗物质暗能量等[2-3]。
地面引力波测量由于受到地表振动、重力梯度等噪声以及试验尺度的限制,探测范围主要集中在高频段,频段被限制在10 Hz以上。为避免地面干扰,实现更大特征质量和尺度、频段集中在中低频段(0.1 mHz~1 Hz)的波源探测,空间引力波探测是唯一选择[4-5]。
国际上,最早的空间引力波探测项目是20世纪90年代欧洲航天局(ESA)发起的美国航空航天局(NASA)参与的LISA(Laser Interferometer Space Antenna)项目,也是20余年来国际上发展最成熟的空间引力波探测计划。LISA由三颗绕太阳旋转的卫星组成,三颗星成等边三角形编队,三颗星两两相距五百万公里,质心落在地球轨道上,落后地球20°,工作频段为0.1 mHz至1 Hz。后来由于NASA的退出和欧洲经费预算的缩减,LISA发展成为eLISA(evolved LISA)项目,同时将臂长缩短为一百万公里[6]。eLISA的技术演示项目LISA-Pathfinder已于2015年12月成功发射,并取得了超预期的结果。2017年6月,NASA重新与ESA合作,将eLISA改回LISA,将臂长调整为二百五十万公里,计划于2034年发射。此外,国际上其它国家或组织还提出了空间激光干涉引力波探测项目,如以低频精密测量和引力波探测为科学目标的ASTROD计划;主要科学目标面向中质量黑洞以及黑洞的宇宙学成长的ALIA;瞄准宇宙早期残留引力波的BBO计划和DECIGO计划等,这些项目由于设计指标要求极高,目前尚未启动[7-9]。
我国在空间引力波探测领域起步较晚,2016年,经过多年的酝酿、调研和积累,中国科学院正式提出并启动了我国空间引力波探测“太极计划”[5]。中山大学也提出了天琴计划,然而天琴轨道为绕地轨道,臂长约为十七万公里,只能探测频段偏高的波源,且难以避免地月系统对其稳定性的影响以及太阳保持热辐射稳定性的影响[10]。
由于引力波信号极其微弱,相对强度为10-20量级左右[4],这一极弱信号的探测对最尖端的科学技术和工程实施都提出了极高的挑战。无论是LISA还是太极方案,为保证如此高精度的系统能在轨正常工作,在卫星技术指标、设计复杂性和成本方面均提出了极高要求,而现有的条件难以实现。
近年来,低成本的商用卫星发展迅速,通过低成本的商用卫星元器件,采用成熟的商用微纳卫星平台,实现卫星技术的在轨验证已成为一种成本低、周期短、效率高的研究方案[11]。本文基于低轨近地商用卫星的设计思路,参考LISA-Pathfinder设计方案,进行引力波探测任务的初步设计,并提出对关键技术低成本的在轨验证设想,希望能对后续空间引力波探测卫星总体设计提供一定借鉴。
2 科学技术及任务需求
根据广义相对论理论,空间引力波探测可以利用自由悬浮的检验质量作为传感器,来感知当引力波经过时时空结构所产生的微小变化。这一过程可以从以下两个不同角度的描述来阐释:(1)引力波引起光在两检验质量间传播时间的改变。当引力波经过时,会引起光在两个检验质量间往返时间发生变化,根据LISA分析,若经过的引力波相对强度为10-20量级左右,在探测敏感频段,即使卫星间相距五百万公里,当引力波经过时产生的距离变化仅为几十皮米量级,这对激光干涉测量系统提出了极高的要求。(2)引力波引起两检验质量间加速度梯度的改变。根据LISA分析,若经过的引力波相对强度为10-20量级左右,在探测敏感频段,引力波引起的两检验质量间相对加速度变化在10-15ms-2/Hz1/2量级。基于上述分析,中国科学院提出的太极计划最终指标为在探测频率范围(0.1 mHz~1 Hz)内,激光干涉仪测量精度达到pm/Hz1/2量级,加速度变化测量精度达到10-15ms-2/Hz1/2量级[4,12-13]。
因此,在空间进行引力波探测,其基本原理是利用检验质量的间距作为传感器,将引力波信号转化为检验质量间距变化的信号,再利用高精度的激光干涉仪对这个距离变化进行读出。但是空间环境中存在太阳辐射光压、太阳风及宇宙射线等各种非保守力,以及卫星轨道和姿态控制等作用引起的加速度对检验质量产生的扰动,同样会引起检验质量间的距离变化,因此,为了避免上述因素的干扰,需要通过惯性传感器提供检验质量相对卫星的位移信号,并在此基础上采用无拖曳控制技术反馈卫星姿态调整信号,通过卫星上的微推进器实现多维运动控制,达到抵消非保守力的目的,保证检验质量自由悬浮,实现激光干涉测距系统对引力波信号的有效探测。
然而根据现有的工程能力,要在轨实现太极计划所要求的干涉仪及惯性传感器具有的极高的精度指标,在经费投入成本、研发周期等方面,均存在极大困难。为此,一个可行的思路是借用快速发展的低成本商用元器件,结合目前较为成熟的微纳卫星平台,设计一颗低成本的近地商业卫星,以实现部分关键技术的初步验证为优先目标,简化卫星设计,降低技术实现难度,积累技术基础,再循序渐进向空间引力波探测卫星发展。
3 任务需求分析
3.1 轨道分析及设计
根据引力波探测目标,最佳轨道应为远离地球的日心轨道,其太空环境较为稳定,受到干扰更小。但考虑到发射成本、研发经费等现实问题,以及考虑技术验证的首要目标,设计一颗近地轨道的商业卫星进行初步技术验证是一项更为经济合理同时见效快的选择。
卫星设计首先应考虑轨道设计,由于星上需要搭载惯性传感器,轨道偏心率会影响卫星对地面向心加速度的波动,轨道偏心率应越小越好,因此选择圆轨道能更好地降低干扰。
在近地轨道上,太阳同步轨道的空间环境较为稳定。太阳与卫星轨道面夹角变化较小时,有以下几项优点:(1)光压对卫星的作用方向较为稳定,有利于减少有效载荷测量方向的光压影响;(2)阳光对卫星的照射方向较为一致,有利于卫星能源设计,减轻卫星重量;(3)卫星外热流环境较为稳定,利于有效载荷的高精度温控设计。因此选择太阳同步轨道。
在近地轨道上,卫星对降交点地方时无特别要求,考虑卫星能源设计,选择光照条件良好的上午6:00晨昏轨道,可以大幅度减少太阳帆板面积和蓄电池容量,同时保证空间外热流较为稳定。
卫星在近地轨道上所受非保守力来源主要有大气气阻、太阳光压和引力梯度波动。通过STK仿真,分析不同轨道高度时卫星的速度参数,并结合大气密度平均值数据,计算不同敏感轴方向及轨道高度下,一平米迎风面所受到的大气阻力,结果如表1所示。

表1 大气阻力分析Tab.1 Analysis of atmospheric resistance
从表中可以看出,轨道高度越高,空气越稀薄,受到的大气气阻也越小,但同时对卫星的元器件等级要求也越高。通常对于商业卫星,元器件等级相对较低,在700 km以上容易受到空间单粒子效应影响。而轨道太低,大气气阻的干扰增加,影响测量精度。因此轨道高度推荐选择500~700 km。
图1所示为卫星不同方向上受到的大气气阻值,可以看到,在对地方向受到的气阻最小,比卫星飞行方向低两个数量级,因此在技术验证中,只考虑检验质量敏感轴对地方向受到的非保守力干扰。
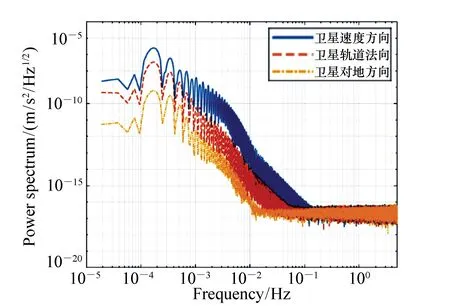
图1 卫星不同方向上受到的大气气阻Fig.1 Atmospheric drag of satellite in different directions
卫星在太阳同步圆轨道上不同方向上受到太阳光压如图2所示。为保证卫星能源,太阳光压干扰难以避免,但量级较小,在测量频段内的影响可忽略不计。
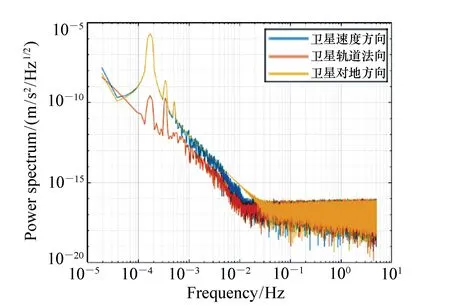
图2 卫星不同方向上受到的太阳光压Fig.2 Sunray pressure of satellite in different directions
对检验质量来说,同时受到地心的重力梯度以及飞行器微形变带来的内部各部件距离变化引起的星内引力梯度即自引力梯度的影响,两者之和可称为引力梯度干扰。通过分析计算,由于星体质心和检验质量块质心之间距离相对变化引起的自引力梯度干扰为10-10m/s2/Hz1/2量级。进行轨道设计时可以忽略此项非保守力源。
卫星所受引力梯度波动对轨道设计影响较小。在近地轨道,外部重力梯度波动无法控制,对于自引力梯度波动,通过设计星内无活动机构,无展开帆板控制,同时通过卫星的结构热控设计结合精密装配,保证星体质心和检验质量块质心之间距离相对变化小于0.1 mm。
3.2 姿态需求分析
卫星姿态指向应尽量避免检验质量敏感轴与太阳光压、大气气阻耦合。根据轨道分析,检验质量敏感轴在对地指向时比敏感轴指向大气气阻方向时所包含的大气气阻干扰力加速度要高,且对地指向下卫星外热流和光照环境更为稳定,因此选择卫星姿态为对地指向。
卫星轨道设计为太阳同步晨昏轨道时,太阳方向与卫星轨道面的夹角呈周期性变化。对于技术验证商业卫星,科学需求对卫星指向精度要求较低,以成熟的WN100微纳卫星平台指标为例,卫星可实现指向误差优于1°,分析敏感轴为对地指向时,考虑太阳光压和大气气阻对飞行器的扰动加速度沿敏感轴的分量,计算耦合进入敏感轴的测量误差。此时太阳光压干扰对系统测量的误差影响如图3所示。
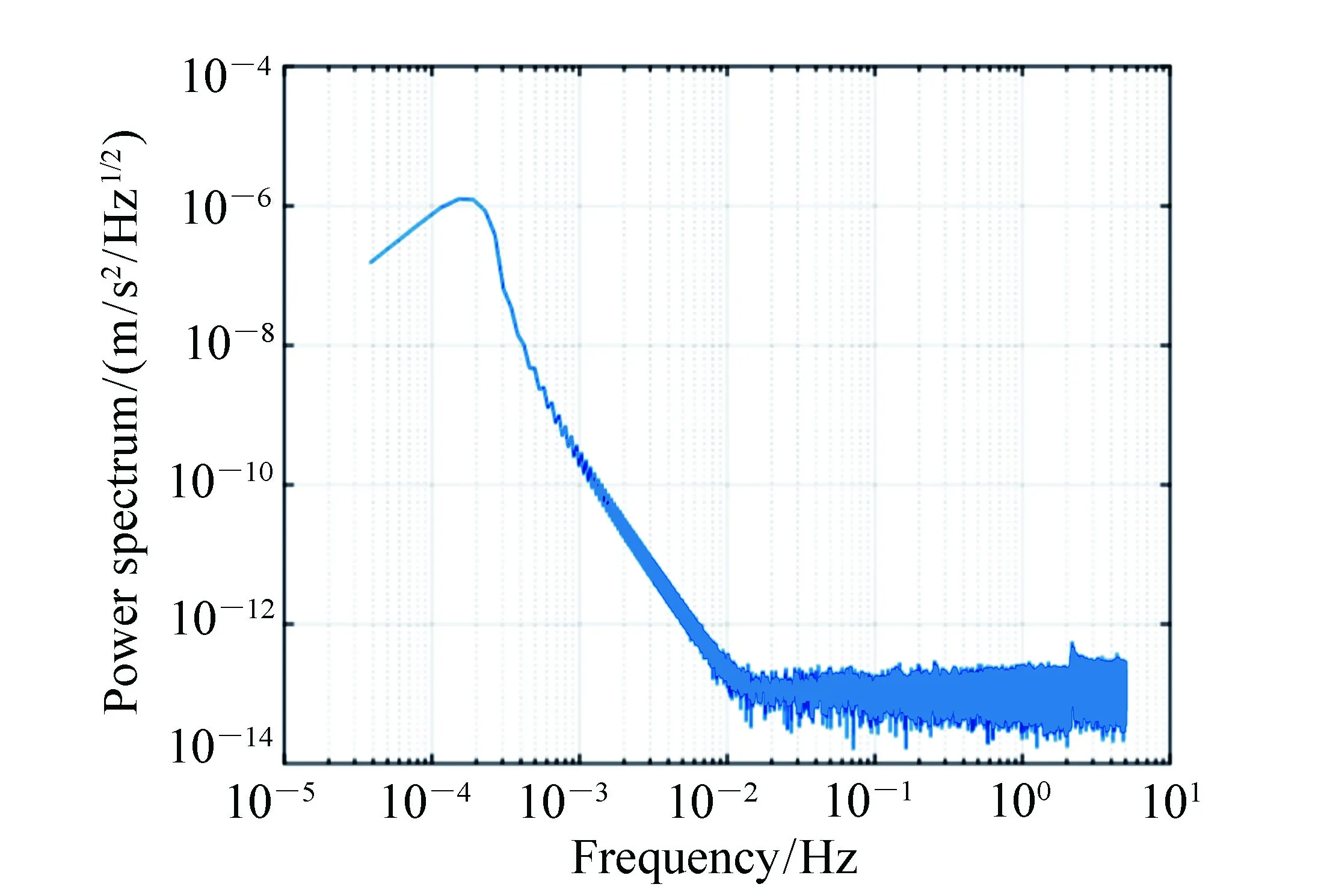
图3 敏感轴对地指向时的太阳光压干扰Fig.3 Sunray pressure noise when sensitive axis pointing to the earth
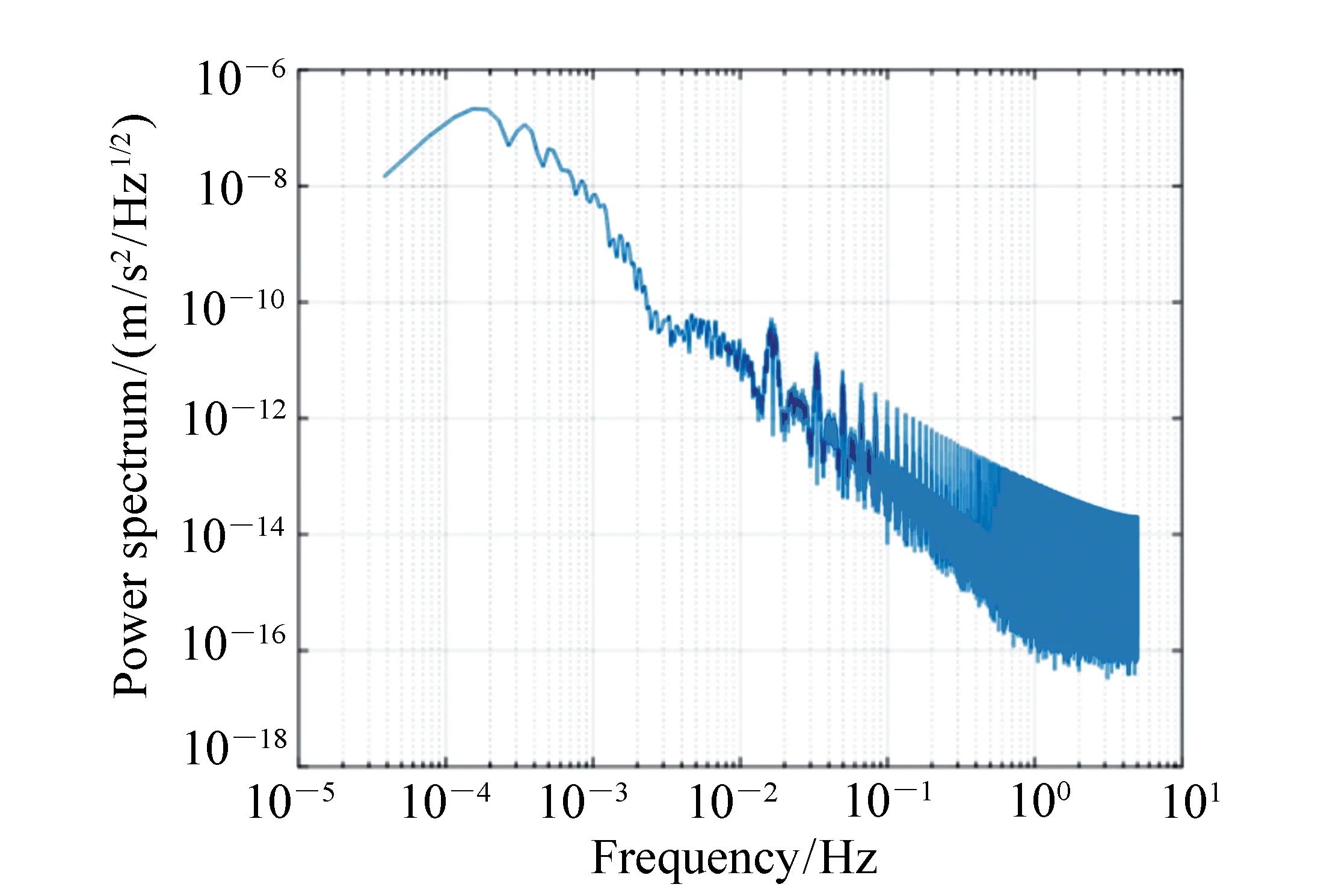
图4 敏感轴对地指向时的大气气阻干扰Fig.4 Atmospheric drag noise when sensitive axis pointing to the earth
测量敏感轴对地指向时,迎风面方向的大气气阻对飞行器的扰动加速度不耦合进入敏感轴测量误差,引入指向误差影响大气气阻受力面的干扰,耦合进系统测量的干扰如图4所示。
为满足卫星指向误差需求,通常要求卫星姿态测量误差比指向误差小一个量级,即要求卫星姿态测量误差低于0.1°。对于WN100平台,测量误差可优于0.05°。
为提升残余加速度测量水平,需要尽量减少卫星抖动引起的向心加速度。而卫星抖动引起的向心加速度受到检验质量质心和卫星质心之间距离变化的影响。质心偏差引起的自引力梯度波动干扰可由下式表示:
(1)
其中,GM为常数,其值为3.986 004×1014m3/s2,地球半径Re=6 378.14 km,h为瞬时卫星轨道高度,dr为质心偏差。
对于WN100平台,卫星稳定度指标可达到0.05°/s, 在此指标下,检验质量质心与卫星质心产生的瞬时距离变化小于0.1 mm时,引起的自引力梯度波动干扰在可接受范围内。
3.3 光照及外热流分析
在选择的6∶00AM太阳同步轨道下,仿真分析了6个月内太阳光与轨道面之间的夹角(β角)的变化情况,如图5所示,变化范围约为73°~90°,每年有3个月为全光照。
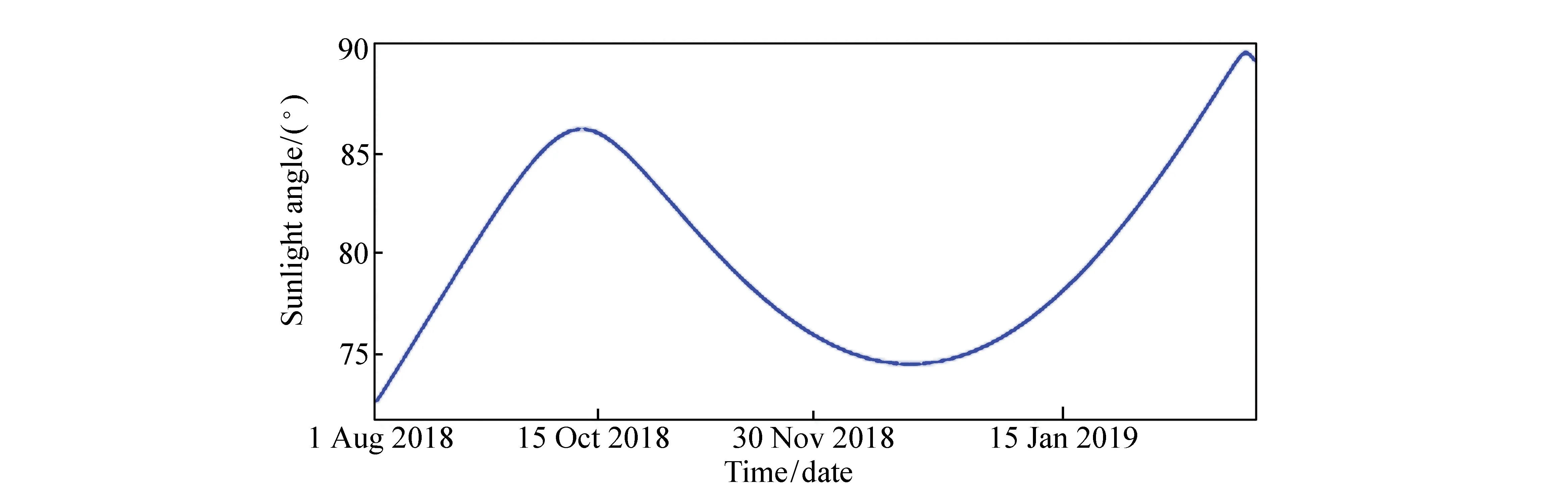
图5 6个月内太阳光照角的变化情况Fig.5 Change of sunlight angel in six months
定义卫星的飞行方向为+X方向,+Z方向为对地方向。此轨道指向下,-Y面为光照面,有利于整星能源的获取,保证科学实验任务期间能源的充足供给。
根据光照情况,以商业微纳卫星规则的六面形结构来计算卫星6个方向的外热流,定义卫星表面辐射特性为太阳吸收率α,值为0.2,发射率ε为0.8。外热流仿真模型及各面平均热流统计如图6、7所示。

图6 外热流仿真模型示意图Fig.6 Schematic diagram of simulation model of external heat flux
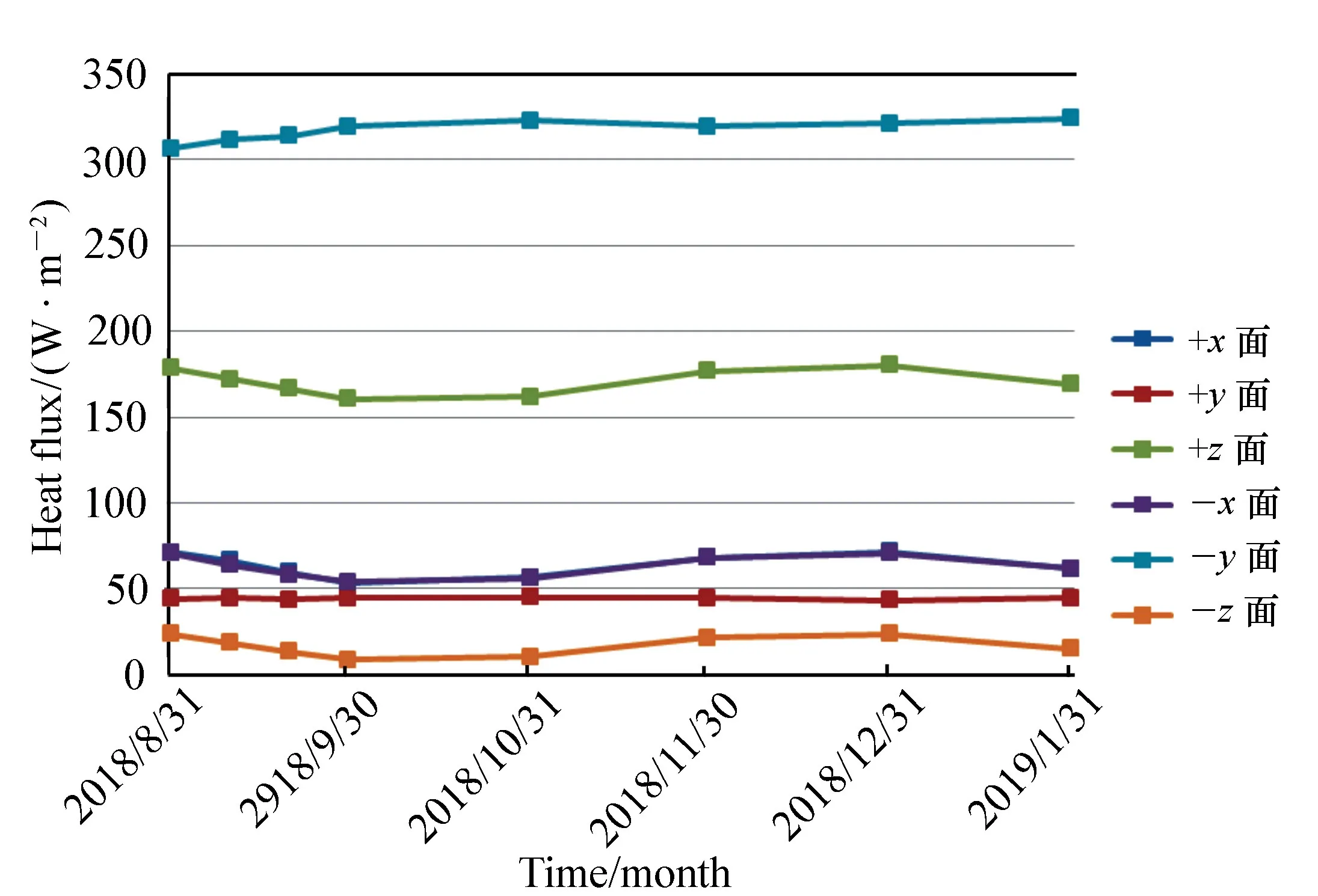
图7 各面热流(W/m2)分布情况Fig.7 Heating flux distribution(W/m2) of different surfaces
从图7可以看出,卫星6个面的平均外部辐射热流相对比较稳定,其中-Y面为向阳面,平均外部辐射热流最大,其中+Y方向的热流波动最小,是散热面首选方向。
4 卫星平台关键技术分析
4.1 超稳结构关键技术
引力波激发的测量信号极其微弱,为尽量减少结构形变引起的误差以及卫星自身引力场对检验质量产生的引力干涉,对商业卫星结构设计提出了超稳的要求[14]。由于在地面难以验证卫星在轨的结构变化,可以通过商业卫星在轨测试,得到准确的数据,为高精度自引力的仿真及无拖曳控制精度分解提供帮助。
自引力梯度与卫星的质量分布直接相关,卫星装配精度、单机质量分布、结构变形等偏差因素都会影响星内的自引力噪声水平。由于卫星单机设备、结构部件以及电缆等组件的质量并非均匀分布,形状也不都规则,因此在进行飞行器的自引力分析时,需将单机设备、结构部件等离散化处理为不同尺寸和质量的单元,采用有限元方法进行计算。在此基础上将自引力分析和构型布局进行多次迭代,并需要通过实际测量星上单机质量分布代入模型,使自引力分析结果更为准确。
科学探测中,卫星的质心、航天器自身引力平衡中心与检验质量中心的偏差越小,可实现的探测精度越高。在设计及实施过程中,通过仿真分析结合实际布局设计和配重实现。利用三维模型和有限元仿真技术分析卫星质心、自引力中心与检验质量中心的位置,并预设配重的大小、重量和安装位置,根据与检验质量距离的远近程度分层布置。在实际工程实施中,根据所有装星部组件实际的检测结果,尤其是质量及质量分布,对三维模型和有限元仿真模型进行修正,对配重的大小、重量和分布进行适当调整。
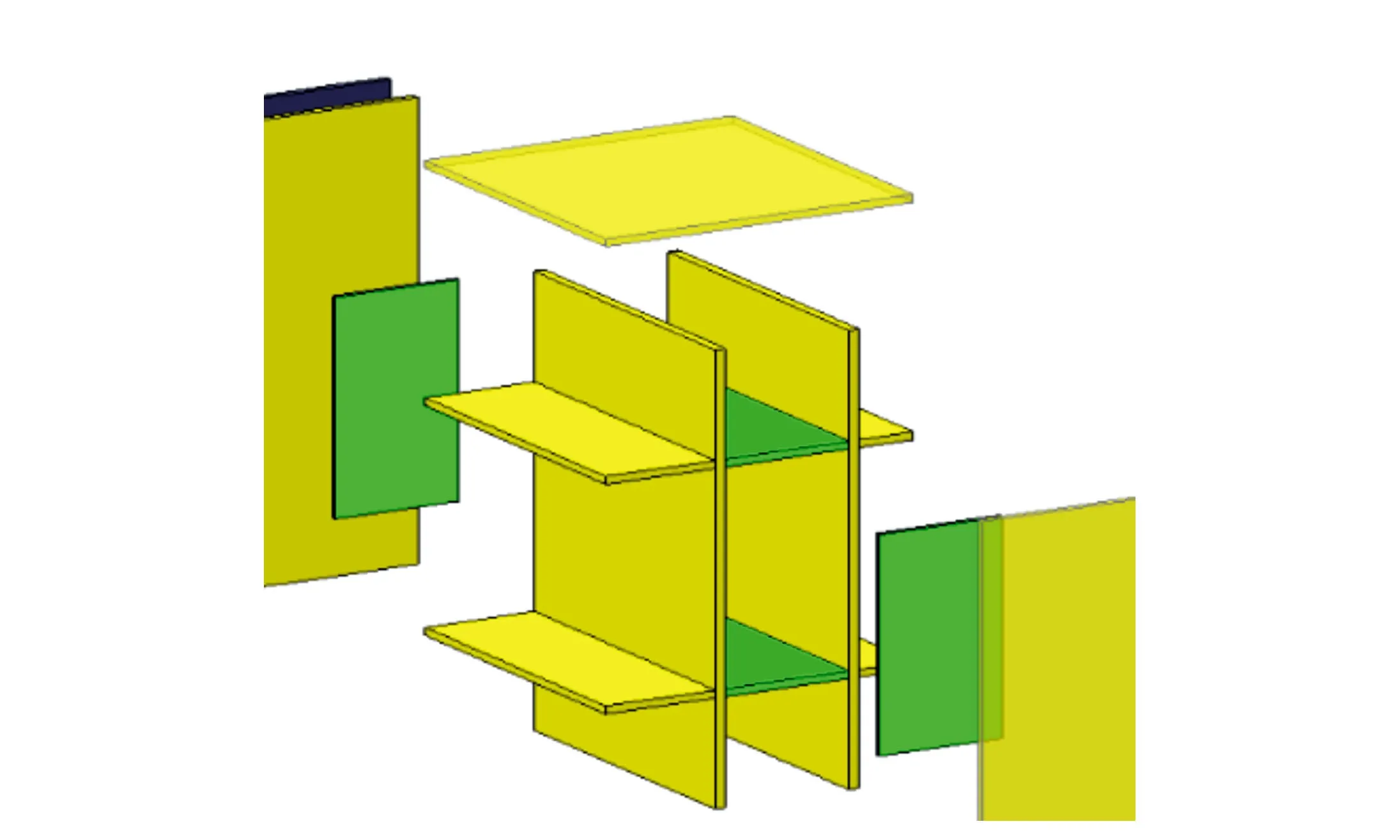
图8 卫星初步构型示意图Fig.8 Schematic diagram of satellite preliminary configuration
商业卫星的初步结构设计理念与微纳卫星WN100平台设计理念类似,卫星为板式结构,但考虑到尽量减少结构形变,在实际研制时需要使用热膨胀系数远小于常规材料的低热膨胀系数材料,初步估算为10-7/K量级。卫星初步构型如图8所示,卫星内部单机布局围绕惯性传感器中心的检验质量块中心布局,核心载荷(即载荷测量核心部件)在星体内部中央,通过隔板形成一个封闭的内部空间,便于实施高精度温控。通过仿真分析可知,卫星垂直运载转接环方向一阶模态大于150 Hz,平行转接环两个方向一阶模态均大于30 Hz,满足常规运载发射要求。
4.2 高稳定度温控技术
引力波观测科学任务对载荷的温度控制提出了很高的要求。因此卫星需考虑实现高稳定度温控方案的近地在轨验证,进而确保技术方案及指标的可行性。针对这一需求,拟采用考虑扰动影响及温度反馈的高效控制方法,结合主动温控与被动温控,对整星进行分级温控,以期实现核心载荷外围环境的高温度稳定性。
卫星考虑采用三级温控策略,三级温控为常规的单机温度需求,针对常规的卫星星内星务单机的温度指标进行设计,热控方案以被动为主,主动为辅,通过多层隔热组件、导热硅脂、热控涂层等实现。
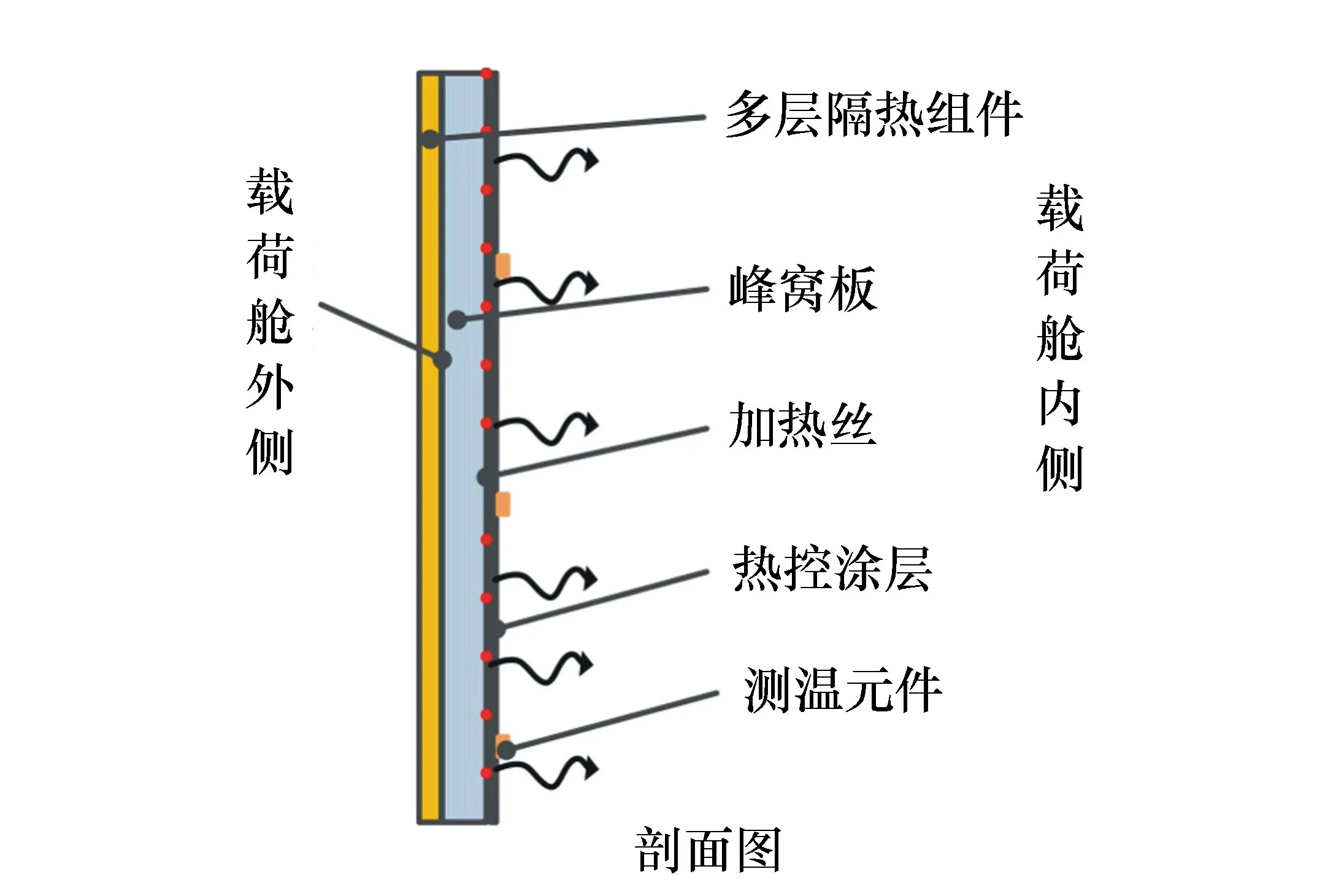
图9 载荷舱热控方案设计示意图Fig.9 Schematic diagram of thermal control scheme of payload model
二级温控主要考虑载荷非核心区域的温度稳定性。热控方案采用主动热隔离,同时强化热交换,进行主动精密温控,具体通过采用热网布局、测温监测、闭环控制等手段来实现。首先,热网络布局中,采用加热丝进行整个载荷舱布局,并对加热丝表面喷涂热控涂层,同时对舱板的非面向载荷侧进行多层的包覆,形成单向性“红外笼”热网布局。其次选用高测温精度的测温元件,通过均匀性测点布点设计,实现测温系统的布局。最后通过星务采集,实现闭环控制。图9所示为载荷舱热控方案设计策略实施示意图。
一级温控对象为载荷的核心区域,对于核心区域的温控,一方面考虑全核心区域载荷的多层包覆,另一方面通过高精度的温度测量和反馈实现内部主动闭环精密温控。同时针对核心区域的数据信号电缆进行热隔离,通过多层热包覆,实现电缆在载荷工作期间内的温度均匀性指标要求。
4.3 无拖曳控制与微推进器关键技术
由于空间引力波为极微弱信号,为保证测量精度,消除卫星受到的非保守力的干扰就显得尤为重要。空间中太阳及行星的引力作用,光压、太阳风等各种非保守力,均会对检验质量产生干扰,需要通过无拖曳控制技术尽可能降低干扰。利用商业卫星实现在轨无拖曳技术验证的基本思路是利用惯性传感器的检验质量作为惯性参考基准,当卫星受到外部非保守力扰动时,检验质量块与航天器平台产生相对位移,惯性传感器将该位移信号作为输入反馈给无拖曳控制系统,控制星上的微推力器,以抵消外部扰动产生的力和力矩。
根据LISA方案,对于三星组成的空间引力波探测星座,现阶段有在星与星之间形成两条或三条激光干涉臂的两种方案。对于两条干涉臂方案,对应其中两颗卫星可包含一个检验质量,对于3条干涉臂方案,每颗星均包含两个检验质量。在两个检验质量的设计方案中,需要考虑检验质量1相对于惯性传感器的位置和3个转动自由度,检验质量2相对于惯性传感器的位置和转动,卫星对于检验质量沿激光方向平面内的位置和转动,光学系统的呼吸角等多项变量,每颗卫星至少包括19个自由度,这对无拖曳控制系统的控制算法和方案提出了很大挑战[15-16]。而对于低成本商业卫星而言,任务的关键并不在于保证高指标的控制精度及推力精度,而在于验证无拖曳控制算法及微推进执行器的工作状态,以实现无拖曳控制,控制回路框图如图10所示。
无拖曳控制分系统可由姿态敏感器、执行机构和控制器组成。姿态确定方案采用星敏感器+陀螺高精度定姿与太阳敏感器+磁强计粗定姿相结合的方案,姿态敏感器包括:星敏感器、模拟太阳敏感器、数字太阳敏感器、三轴磁强计和陀螺组件;执行机构为微推进器系统。为增加可靠性,可考虑搭载三轴磁线圈和反作用轮作为常规备份方案。
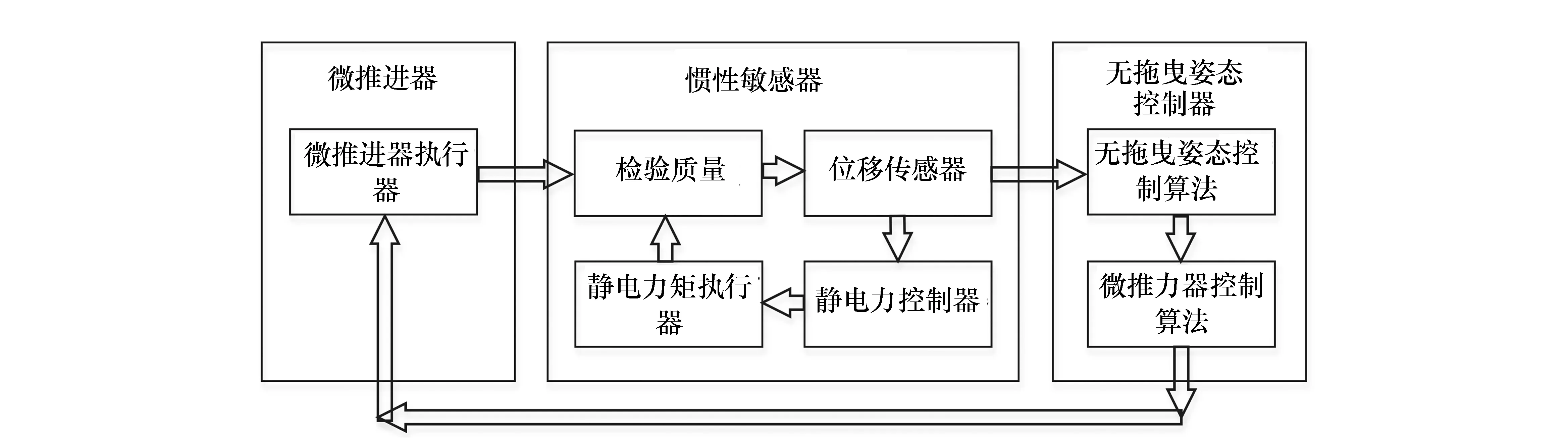
图10 无拖曳控制回路框图Fig.10 Block diagram of drag-free control
无拖曳控制与惯性传感器和微推进器之间为强耦合关系,惯性传感器一方面作为无拖曳控制系统的测量设备,用来提供平台与检验质量之间的高精度相对位移与相对姿态信息输入;另一方面作为无拖曳控制系统的执行机构,根据算法输出指令提供非敏感轴方向的静电悬浮控制力,通过微推进器为平台提供精准的推力补偿。

5 结 论
空间引力波探测可以为天文学和宇宙学开拓一个全新的观测窗口,为人类探索宇宙提供全新的观测手段,然而由于引力波信号极其微弱,直接测量非常困难,对空间卫星技术和精密测量提出了极大挑战。为降低成本并快速实现关键技术验证,本文设计一颗近地低成本的商业卫星,针对引力波部分关键技术的验证需求提出了基于成熟微纳平台的商业卫星方案,进行了任务设计需求分析如轨道分析、姿态分析、空间环境分析等,并针对商业卫星实现超稳结构、高精度热控、无拖曳控制三项关键技术验证提出了初步设想。希望上述工作能对引力波探测卫星的任务分析及关键技术验证提供思路,并为未来的空间引力波探测卫星总体设计提供参考与借鉴。