面向地面无人平台的仿生偏振光定向算法
2019-07-11何晓峰何靖波张礼廉
何晓峰,蔡 宇,范 晨,何靖波,张礼廉
(1.国防科技大学智能科学学院,长沙 410073; 2.75480部队,广州 510500)
0 引言
基于自然界中生物视觉感知机理的传感技术的发展,为导航的发展提供了新的技术途径。在自然界中普遍存在着生物通过感知偏振光确定方向,进行觅食、迁徙、归巢等生物活动[1]。生物视觉系统独特的定向能力,以及高超的运动感知系统等,都给了人类深刻的启示。已有学者采用生物导航模型开展仿生导航技术研究,并应用于机器人、无人机等自主导航[2]。地面无人平台和智能机器人对自主导航的需求迫切[3-4],因此通过借鉴和学习生物这类偏振成像定向方法,可应用于辅助解决地面无人平台的定向问题。
仿生导航技术由于其独特的优势及巨大的发展潜力,成为了自主导航技术领域发展的新方向[5],被国内外的高校、研究机构所重视,研究工作均在不同程度上受到了各国航天部门或者军方的支持。由于战时电磁干扰,卫星导航精度严重降低,甚至变得不可用,而惯性导航存在误差随时间累积的不足。因此,基于视觉图像数据的仿生偏振光导航技术,其应用前景非常广泛。对于地面无人平台而言,尽管可能存在部分天空区域被遮挡的情况,也能通过无遮挡区域的天空偏振光实现定向。国内外学者已设计了性能优良的偏振成像传感器[6-9],可用于自主定向或者图像增强。
本文介绍了一种基于图像式测量的偏振光传感器,研究了一种基于偏振光图像利用加权平均的方法进行航向角解算的方法。以此为基础,推导了偏振测量误差、太阳位置误差等对定向精度的影响情况,并进行了仿真分析;开展了室外条件下的车载实验,验证了微阵列式光罗盘在动态条件下的定向效果。
1 微阵列式偏振光罗盘结构设计
微阵列式光罗盘是一个高度集成的传感器系统。采用微纳米加工技术,设计微阵列式多象限纳米金属光栅阵列结构,进行微阵列式偏振片与CCD感光片的安装对准,研制微阵列式光罗盘原型样机[9]。课题组设计的光罗盘结构如图1所示。
微阵列式光罗盘实物如图1(a)所示,主要由广角镜头、微阵列式偏振片和电荷耦合器件(Charge-Coupled Device,CCD)相机组成。CCD相机(PointGrey, BFLY-U3-03S2M)的分辨率为480×640,镜头的焦距为3mm,视场角为77°×61°。入射光沿光轴方向进入广角镜头,然后通过微阵列式偏振片分离4个方向的偏振光信息,到达CCD芯片上,从而获得4个方向的偏振光光强信息,用于解算偏振态信息。像素偏振片阵列如图1(b)所示,相邻的4个像素构成一个偏振测量单元,完成对某一个视角方向入射光的偏振解算,各像素对应的偏振方向分别为0°、45°、90°、135°。像素偏振片阵列与CCD像素尺寸完全相等,边长为7.4μm。
1.1 偏振测量原理
对于第j个偏振片,假设入射光的总光强为I,偏振度为d,则任何一束入射光都可以分解为自然光部分和线偏振部分(在此处不考虑圆偏振部分)。通过偏振片后,出射光仍由两部分组成,为自然光和线偏振。对于自然光部分,通过偏振片之后,光强变为原来的一半,则
(1)
对于线偏振部分,由马吕斯定律可得
Ipz=Idcos2(φ-βj)
(2)
而实际通过偏振片的总光强为2个部分的线性相加的结果,所以,通过每一个偏振片的光强可以表达为
(3)
将式(3)写为
(4)
整理得
(5)
式中,I、d、φ为待求量。
1.2 偏振测量方程
如图2所示,照射到微阵列式光罗盘上的入射光首先会通过阵列式偏振片,然后照射到CCD相机对应像素点,获取光强数据。在实际测量过程中,由于相机内部特性和噪声等因素的影响,即使入射光光强一致,相机中每个像素的响应也是不一致的。以每个像素为对象,建立响应线性模型,模型中包括刻度因子、零偏和噪声。则某一个偏振测量单元的CCD像素对透过偏振片的入射光的响应为
fj=KjIj+bj+nj(j=1,2,3,4)
(6)
式(6)的含义为将相邻的4个像素作为一个偏振检测单元,fj为实验获取到的测量值,I为总的入射光的光强信息,Kj和bj分别为刻度因子、零偏,是待标定的CCD相机的线性误差参数,nj为测量过程中的噪声,主要为白噪声。
则每一个偏振测量单元对入射光的响应可以表达为
(7)
其中,j=1,2,3,4。
然而,在偏振光传感器实际加工过程中,需要采用纳米对准技术将微阵列式偏振片集成于CCD芯片之上。在此过程中,会产生一定程度的安装误差,从而对偏振测量结果产生影响。对此过程进行深入分析,可以得到更加准确的偏振测量方程
(8)
其中,εj为等效的偏振片安装误差角,kj为信号衰减系数,具体推导过程可以参考相关文献[10-12]。
2 基于加权平均的偏振光定向算法
实验中的坐标系建立如图3所示:以视线方向为Z轴,切线方向为X轴建立测量系(i);以天顶方向为Z轴,偏振光传感器参考方向为X轴建立导航系(n);以载体的竖直向上的方向为Z轴, 平面中垂直于Z轴方向的X轴建立载体系(b);在图3中为避免图形过于复杂,仅画出测量系和载体系示意图。
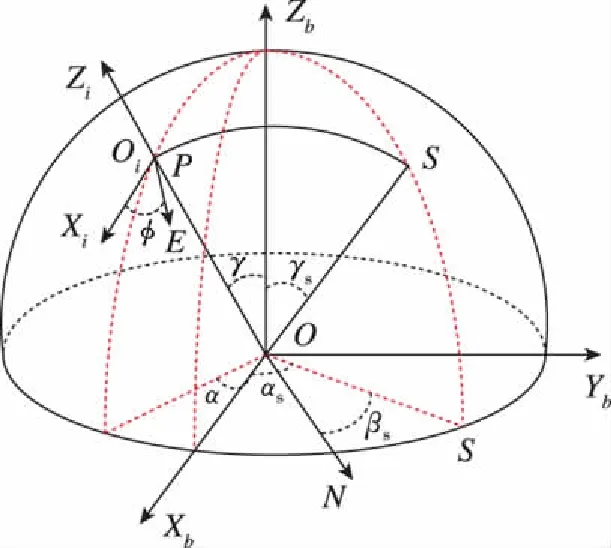
图3 定向原理示意图Fig.3 Schematic diagram of orientation principle
图3中,αs为太阳矢量在导航系中的方位角,βs为太阳矢量相对于真北方向的夹角,所以载体相对于地理真北方向的航向角为
ψ=βs-αs
(9)
太阳矢量在导航系中的矢量表示为
(10)
从载体系到导航系的方向余弦矩阵如式(11),其中r为滚动角,p为俯仰角。
(11)
从测量系到载体系的方向余弦矩阵如式(12),其中γ、α分别为观测点相对载体系的高度角和方位角。
(12)
在测量系中的偏振光矢量为
(13)
在测量系i中,根据一阶瑞利散射模型,微阵列式光罗盘的偏振光定向模型可建立为
(14)

将式(12)、式(13)代入式(14),化简可得
A·cosαs+B·sinαs+C=0
(15)
其中
A=cosγcosαcosφcosr-sinαsinφcosp+ cosγsinαcosφsinrsinp+cosαsinφsinrsinp- sinγcosφcosrsinpB=cosγsinαcosφcosr+cosαsinφcosr+ sinγcosφsinrC=(-cosγcosαcosφsinp+sinαsinφsinp+ cosγsinαcosφsinrcosp+cosαsinφsinrcosp- sinγcosφcosrcosp)tanhs
求解该方程可得每一个偏振测量单元解算出的航向角信息为
(16)
由于存在角度的模糊度,航向角也可写为
(17)

然后由于在模型中使用的偏振角存在近似情况,越靠近偏振片中央的测量单元所使用的偏振角信息越接近真实的偏振角。每一个测量单元都存在一定水平角的投影,故采用加权平均的方法,以每个测量单元对应的高度角作为权重依据,根据实际采集的数据和实际测量效果,以如下权重值为例,建立航向解算模型,最后得到的航向角为
(18)
3 航向角误差估计
在偏振光定向的实际应用环境中,航向角估计误差主要来源于大气偏振模式误差、太阳位置误差、偏振光传感器误差和水平姿态角等几种误差源的线性累加[13-14]。因此可以通过求解微分方程,建立误差链模型
(19)
其中,Δδ为大气偏振模式误差,Δβs为太阳方位角误差,hs为太阳高度角,r为滚动角,p为俯仰角,φ为偏振角。
3.1 偏振测量误差的影响
偏振光传感器的输出为偏振角信息,如图4所示。由仿真计算得到的偏振角误差系数可以看出,当载体水平角较小时,偏振角误差系数在1左右波动,说明偏振测量误差会几乎等量地传递给航向角的计算误差。
3.2 太阳位置误差的影响
由图5可以看出,随着载体的水平角发生变化,太阳高度角变化对定向精度的误差影响系数差异不大,并且在太阳高度角较小的时候,即早晨或者傍晚的时候,太阳位置误差对航向角定向误差影响较小。所以为了获得良好的数据,可以选择早晨和傍晚的时间进行实验。
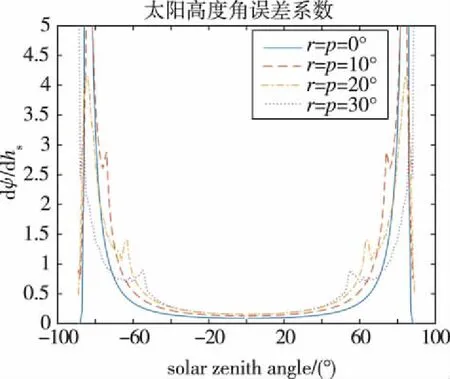
图5 太阳高度角对定向精度影响的误差系数Fig.5 Error coefficient of solar elevation angle
3.3 偏振测量误差的影响
图6所示为载体的水平姿态角对偏振光定向的精度影响系数。由仿真结果可知,当载体的俯仰角和滚动角低于10°时,其误差影响系数小于0.1,随着水平角的逐渐增大,误差影响系数也增大。
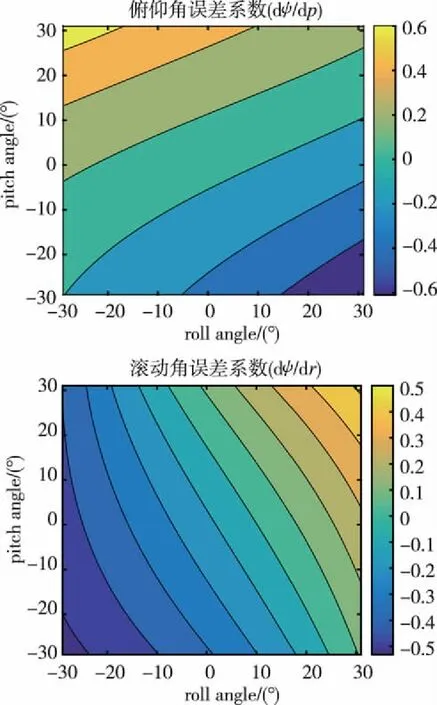
图6 水平角对定向精度影响的误差系数Fig.6 Horizontal angle error coefficient
4 实验测试
为评估微阵列式光罗盘的动态定向精度,开展了车载实验验证。车载实验在晴朗的天气,行驶场地较为开阔,树木和高楼遮挡少。实验设备包括微阵列式偏振光传感器,作为被测对象;Mti-G-700提供载体水平姿态角及位置信息,并且同步控制偏振光传感器的数据采集;GNSS/激光陀螺惯导组合系统作为航向角基准,航向角精度优于0.1°。所有的实验设备都由车内电源进行供电,GNSS/激光陀螺惯导组合系统与光罗盘采用事后对齐的方式进行时间同步。
传感器的安装关系为:微阵列式光罗盘与MTI固联,安装在车顶,GNSS/激光陀螺惯导组合系统固联在车内。微阵列式光罗盘如图7所示。
GNSS/激光陀螺惯导组合系统如图8所示,实验所用车辆如图9所示。

图7 传感器连接关系图Fig.7 Sensor connection

图8 卫星/激光陀螺惯导系统Fig.8 Satellite/laser gyro inertial navigation system

图9 实验车整体Fig.9 Experiment vehicle
车载实验时间为2018年10月28日下午3∶30~5∶30,天气晴朗,行车路线为国防科技大学智能科学学院主楼至学校银河广场,然后环绕银河广场行驶3周结束。微阵列式光罗盘的数据采集频率为1Hz,GNSS/激光陀螺惯导组合系统的采集频率为20Hz,Mti-G-700的采集频率为100Hz。实验开始之前,首先对GNSS/激光陀螺惯导组合系统进行5min的初始对准;然后设置光罗盘数据采集参数,调节为外触发模式,曝光模式选择自动曝光,设置MTI软件参数;行车开始即发送脉冲信号,启动同步数据采集;完成规定的行驶路径之后,设备断电,停止数据采集。
图10(a)为使用微阵列式光罗盘拍摄的数据进行航向角解算所得到的航向角变化曲线,可以看出,航向角解算结果循环变化3次,对应了行车路线为绕场地3周。图10(b)为以光罗盘定向结果与激光陀螺惯导系统结果比较得出的误差曲线,结果数据如表1所示,其中误差均值为0.15°,误差标准差为0.43°。
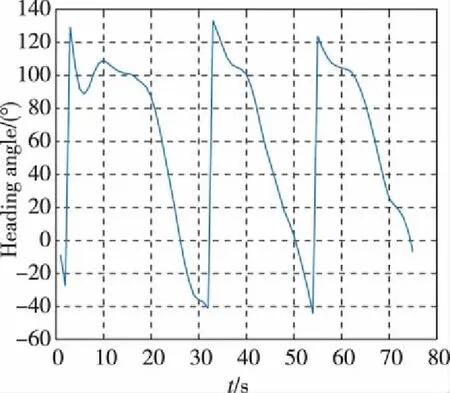
(a)微阵列式光罗盘解算航向角变化
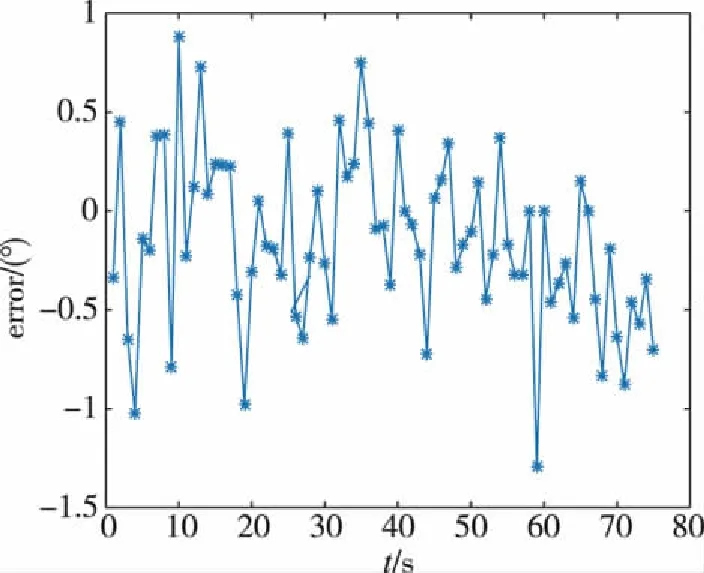
(b)定向误差图10 车载实验结果Fig.10 Vehicle experiment results

实验时间误差均值/(°)误差标准差/(°)均方根误差/(°)最大误差/(°)2018.10.280.150.430.461.29
结果表明,微阵列式光罗盘具有良好的动态定向效果。由实验过程及结果的分析还发现,由于光罗盘的数据采集频率较低,在行驶过程中,如果天空区域出现遮挡,由于曝光模式为自动曝光,相机无法快速响应,很可能会导致接下来连续几帧图像发生过曝,无法用于定向。在后续研究中将优化设计。
5 结论
本文研究了一种基于加权平均的仿生偏振光定向算法,然后基于偏振定向方程,推导得到了误差链模型,仿真分析了主要误差源对定向精度的影响。为测试所设计光罗盘的动态定向精度进行了车载实验,验证其动态定向精度,航向角精度优于0.5°。因此,仿生偏振光定向作为一种新型的低成本、小型化定向方式,可应用于地面无人平台。
