面对称飞行器横侧向稳定控制设计研究
2019-07-11李天任
李天任,张 旋,黄 佩,周 华,郝 颖
(中国运载火箭技术研究院研究发展部,北京,100076)
0 引 言
Nonweiler[1]发现的楔形气动构型是最早高升阻比面对称气动构型,随后陆续发展出锥形流[2]、吻切锥[3]等面对称高升阻比构型。在设计飞行条件下,该类构型前缘处产生的附体激波,阻止下表面的高压气体横向“泄露”到上表面,可有效减少飞行器的升力损失[4],提高其升阻比,进而使其成为高升阻比再入飞行器重要构型之一[4]。面对称高升阻比再入飞行器,气动特性复杂,通道间耦合效应强烈,可能导致控制机构的执行效果与设计预期效果相去甚远。
面对称再入飞行器的气动构型在实际应用中,需设计合适的姿态稳定策略及控制参数,使其能沿着既定的目标飞行。本文采用全状态量反馈控制器,推导出适用于不同状态的控制稳定条件,设计了相应控制策略,并通过不同工况下的参数调整与运动仿真,验证了稳定条件适应性与控制策略有效性。
1 横侧向姿态动力学模型
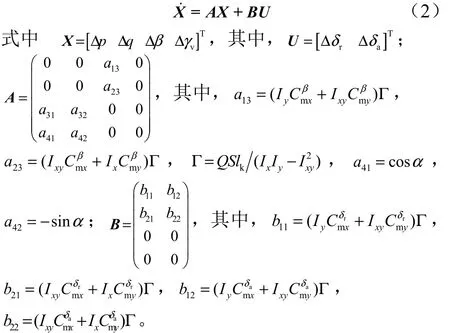
基于中国航天领域常用的机体坐标系[5],建立非线性运动学与动力学方程:
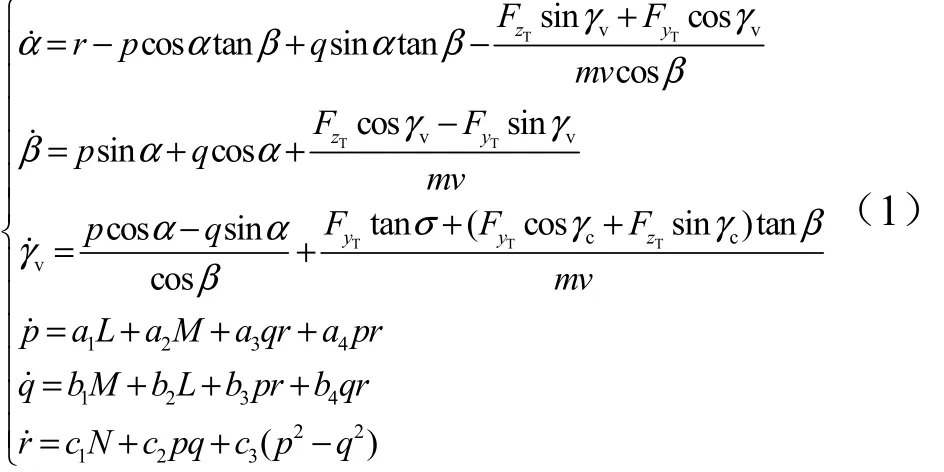
面对称再入飞行器采用倾斜转弯(Bank-to-Turn,BTT)控制方式,侧滑角始终限定在0°附近,忽略纵向运动及气动阻尼项对横侧向运动的影响,并将重力因素划归制导系统补偿,设:δr,δa为飞行器方向舵及副翼舵偏角; Ix,Iy,Ixy为飞行器对体轴 OX,OY的主转动惯量及惯量积; Q , S, lk为飞行动压、飞行器参考面积和参考长度;为滚转力矩系数与偏航力矩系数对侧滑角、方向舵及副翼舵偏角的导数。得到基于平衡状态的横侧向小扰动线性化状态方程为
2 控制稳定性分析
2.1 方向舵控制稳定条件
基于式(2),采用全状态量反馈,得到控制器方程为

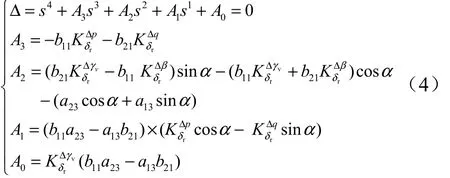
根据劳斯稳定判据,系统稳定的充要条件为

以上充要条件形式复杂,不便于分析,这里推导其必要条件:

另设:
考虑到面对称飞行器通常要求荷兰滚模态稳定,本文坐标系下即有,同时限定飞行攻角在,可得以下稳定条件:
2.2 副翼控制稳定条件
与第2.1节的分析类似,副翼采用全状态量反馈,得到控制器方程如下:

另设:

式中 dLCDP为横向操纵偏离参数(Lateral Control Departure Parameter,LCDP)与 d~LCDP同号。可得以下稳定条件:
2.3 常规控制稳定条件
根据文献[6],副翼与方向舵分别控制横向与侧向通道,得到常规控制方程为
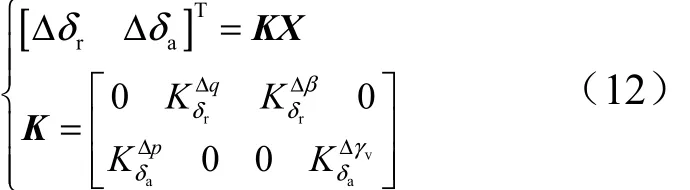
综合式(8)与式(11),得到如下稳定性条件:
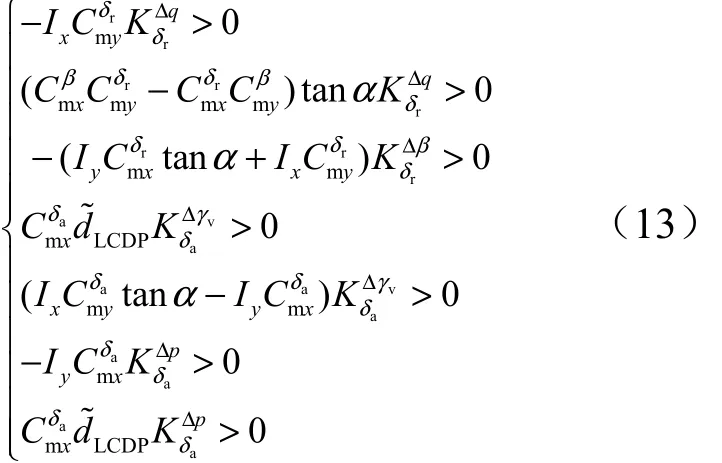
式(13)表明,若飞行器使用常规控制方案实现姿态稳定,则其气动特性需满足:
3 控制器设计与仿真
1958年,Moul和Paulson[7]提出的LCDP判据,是高升阻比再入飞行器气动布局设计与评估的重要指标。因此,本文针对某面对称再入飞行器,分别选取LCDP为负值与正值两个典型飞行工况,进行控制器设计与仿真。
3.1 LCDP小于0
此时,飞行器横侧向状态方程参数取值为:α=10°,a13=-9.57,a23=-0.2885,b11=0.4382,b21=0.1087,b12=-3.294,b22=-0.0642。
这一工况下,按照舵面使用方式不同,设计3类控制策略:
a)策略一:方向舵主导控制横侧向通道,反馈侧滑角、倾侧角及偏航角速度;副翼增稳,反馈滚转角速度。
b)策略二:副翼主导控制横侧向通道,反馈侧滑角、倾侧角及滚转角速度;方向舵增稳,反馈偏航角速度。
c)策略三:方向舵控制侧向通道,反馈侧滑角及偏航角速度;副翼控制横向通道,反馈倾侧角及滚转角速度。
图1展示了输入为1°倾侧角指令时,系统的状态响应及舵偏角曲线。
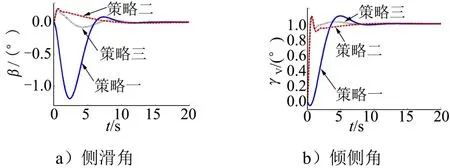
图1 状态响应及舵偏角曲线( dLCDP<0)Fig.1 The State Response, Rudder and Aileron Curve (dLCDP<0)

续图1
由仿真结果可知:
a)副翼主导控制(策略二)与常规控制(策略三)对比:二者在横向通道的表现较为类似,倾侧角、滚转角速度及副翼舵偏角曲线十分靠近,后者的倾侧角跟踪略显快速;在侧向通道上,后者引入侧滑角到方向舵的反馈,因而收敛速度更快。
b)方向舵主导控制(策略一)的机理是先产生负的侧滑角,利用飞行器自身横向静稳定性较大( Cmβx<0,a13=-9.57)的特性,进而产生正的滚转力矩,实现倾侧角跟踪阶跃指令。与策略二、三相比:策略一需要较大的侧滑角,另外 Iy与 Ix的比值较大,因此其横侧向通道的收敛速度均慢了不少;阶跃响应初期,倾侧角偏差反馈使得方向舵负偏角较大,而侧滑角尚未大幅增加,正的力矩系数导数(b11=0.4382,0)产生负的滚转力矩,导致倾侧角出现一小段负值。
3.2 LCDP大于0
此时,飞行器横侧向状态方程参数取值为:α=9°,a13=-17.911,a23=-0.185,b11=0.3705,b21=0.09,b12=-8.361,b22=-0.2322。
根据式(8)、(11)及(13)所列的控制稳定性要求,对前文控制策略进行适当修改,得到LCDPd >0时的3类控制策略:
a)策略一:方向舵主导控制横侧向通道,反馈侧滑角、倾侧角及滚转角速度;副翼增稳,反馈偏航角速度及滚转角速度。
b)策略二:副翼主导控制横侧向通道,反馈侧滑角、倾侧角及偏航角速度;方向舵增稳,反馈偏航角速度。
c)策略三:方向舵控制侧向通道,反馈侧滑角及偏航角速度;副翼控制横向通道,反馈倾侧角及滚转角速度;采用副翼方向舵交联[8,9](Aileron Rudder Interconnect,AIR)技术,引入控制器参数KAIR,利用方向舵克服副翼的不利偏航力矩。
图 2为副翼方向舵交联控制结构框图,图 3为dLCDP>0时的状态响应及舵偏曲线。
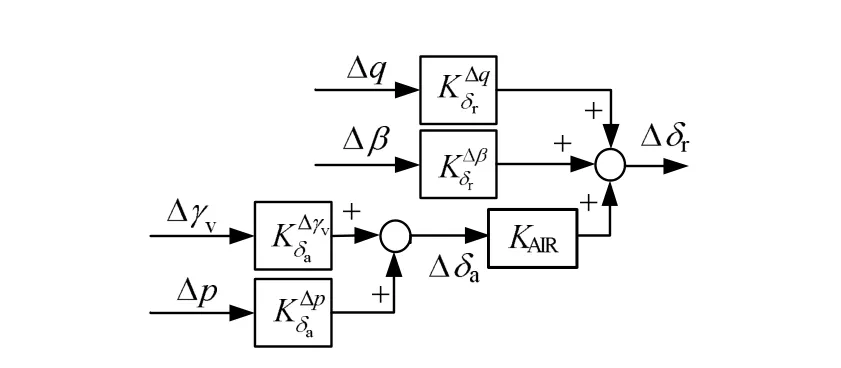
图2 副翼方向舵交联控制结构Fig.2 Structure of Aileron Rudder Interconnect Control
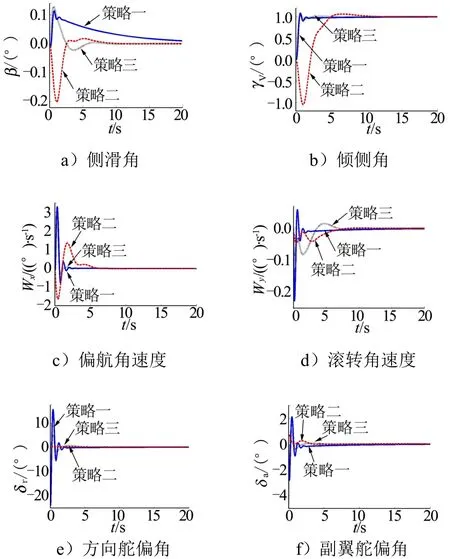
图3 状态响应及舵偏曲线( dLCDP>0)Fig.3 The State Response, Rudder and Aileron Curve (dLCDP>0)
由图3所示的仿真结果可知:
a)方向舵主导控制(策略一)与常规+AIR控制(策略三)对比:二者在横向通道的表现较为类似,倾侧角与滚转角速度曲线十分靠近,副翼舵偏角仅在仿真初始时刻(0.1 s以内)偏差较大,随后变化趋势一致;在侧向通道上,前者的方向舵需完成横侧向两通道姿态稳定,因而其舵偏角更大,但侧滑角收敛速度仍慢于后者。
b)对于策略一:虽然其侧滑角始终为正值,且方向舵偏角为负值,横向静稳定性(=-17.911)与力矩系数对方向舵偏角导数(=0.3705)产生的是负滚转力矩,但由于偏航角速度到副翼的反馈(根轨迹如图 4所示)提升了系统稳定性,副翼舵偏角为负值,且力矩系数对副翼舵偏角导数为较大的负值(),使得综合的滚转力矩为正,倾侧角正向增大。策略三的情形与之类似。
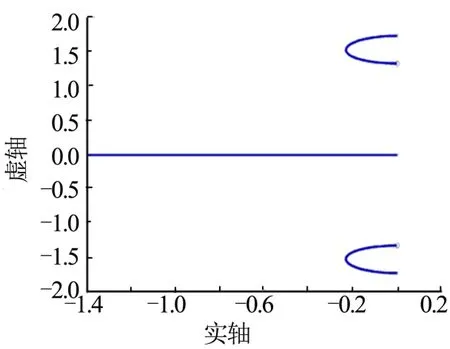
图4 副翼反馈偏航角速度根轨迹Fig.4 Root Locus Diagram for the Feedback from Yaw Angular Velocity to the Aileron
4 结束语
本文以面对称再入飞行器为研究对象,首先从横侧向状态方程出发,基于全状态量反馈,推导了方向舵控制、副翼控制及常规控制的稳定条件。随后,针对LCDPd <0与LCDPd >0两种工况,各自设计了方向舵主导、副翼主导及常规(+AIR)3类横侧向控制策略。最后,仿真算例显示3类策略均可实现姿态稳定控制,验证了稳定控制条件对不同特性飞行器的有效性与适应性。文中的研究,亦可适用于升力体、融合体、翼身组合体等其它高升阻比面对称构型飞行器,对工程实际应用具有一定参考价值。