基于倾角仪与测量机器人的异形桥变形监测研究
2019-07-09张海明王明常林楠王凤艳张馨月
张海明,王明常,2,林楠,王凤艳,张馨月
1.吉林大学 地球探测科学与技术学院,长春 130026;2.国土资源部 城市土地资源监测与仿真重点实验室,广东 深圳 518000;3.吉林建筑大学 测绘与勘查工程学院,长春 130118
0 引言
近年来,异形桥、空中栈道等一些特殊设施作为旅游景点的主要观光场所,其在服役过程中因不断受到人为和自然因素的影响,长时间使用后出现了变形、老化、损坏等现象,产生了不可忽略的安全隐患。因此,在对其开展变形监测的过程中,克服不利施测条件、考虑变形因素、及时准确地反映出异形桥的变形情况、得出影响变形的主要因素,对人员安全的保障以及异形桥的保护具有重要意义[1]。由于异形桥地理位置和结构等的特殊性,对其采取一种综合、精确、高效的测量手段进行有效监测,是目前该领域研究的重点问题之一。Lin et al.利用倾斜传感器和高精度经纬仪对美国Parrotts Ferry大桥进行了挠度的监测,通过对比两组数据得出了桥梁挠度测量更高效的测量手段[2]; Lin提出在获取倾角数据后,利用余弦函数来拟合桥梁桩基变形,从而缩减了繁琐的测量步骤[3-4];何永琦等研究分析了不同工作原理倾斜传感器在桥梁变形监测中的应用,提出了简化模型和算法,提高了工作效率[5];李勇等利用MATLAB编程工具对实时倾角数据进行积分、拟合得到了桥梁的结构变形,提高了通过倾角反映桥梁变形的能力[6];殷杰等采用倾角仪通过辛普森数值积分算法得出挠度,并将倾角测量数据与水准仪实测值作对比,得出了结合算法和满足工程精度需要的测量手段[7]。同时,依托测量机器人进行桥梁的变形监测也是该领域研究的热点。Hernandez利用测量机器人对5座桥梁在控制荷载下的位移进行监测,表明荷载是影响桥梁位移的因素之一[8];余加勇等利用TCA2003测量机器人的自动照准(ATR)功能获取固定在桥梁上的合作目标的几何信息,得出了一种基于TCA2003测量机器人自动照准功能的更加快速高效的测量方式[9]。虽然倾角仪和测量机器人在桥梁变形监测方面都有较多运用,但更综合、精确、便捷、灵活的测量方式仍是目前该领域研究的热点与难点。
倾角仪获取倾斜角和测量机器人测量倾斜量是桥梁变形数据采集的两种手段,且都能获得满足工程需要的监测数据。本文将两者结合,运用于异形桥的变形监测,在顾及荷载、风向和风速这些因素的前提下,获得两套相互独立的观测数据,拟通过对数据公共部分做数据迭代和方差显著性差异检验的方式,验证两组数据的一致性,证实倾角仪与测量机器人联合作业模式在异形桥变形监测中的可行性。同时,通过正交试验的方式得出影响异形桥变形的主要因素,通过判断时间节点的方式得出倾角仪和测量机器人反映异形桥变形的灵敏度[10],对异形桥的变形监测研究提供了一种新的设计思维和研究方式。
1 方案设计
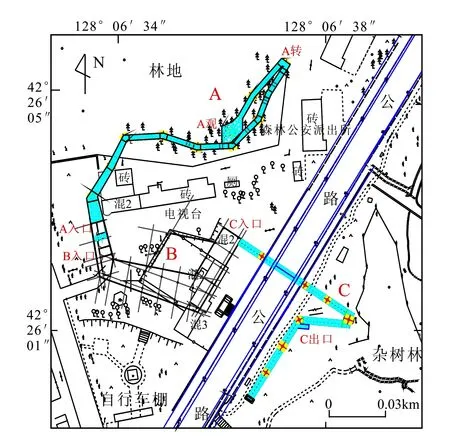
图1 廊桥结构图Fig.1 Gallery bridge structural drawing
本文实例中空中廊桥由三部分组成:蛇形观光走廊部分(A)、公园建筑部分(B)、立交桥部分(C)。其中B、C部分海拔较低且结构稳定,几乎无变形;A部分海拔较高,游客较集中,其转台和观光台部位倾斜变形较大,已影响到廊桥的正常使用,存在较大安全隐患,故本次施测主要以A部分转台和观光台的倾斜监测为主(图1)。施测过程分为两个时段,同时段内,使用TM30测量机器人和MEMS三轴加速度倾角仪以各自独立且同步的方式获取廊桥的倾斜数据,同时采用DEM6型轻便三杯风向风速仪测定转台或观光台风向、风速,其中a位置为转台施测位置,b和c位置为观光台施测位置,c位置为测量机器人重复观测位置,在d、e和f位置通过统计游客体重计算出荷载(图2)。对数据进行整理和计算得出两组位移值,并结合荷载、风向和风速进行数据分析(图3)。

图2 施测关系图Fig.2 Surveying relation diagram
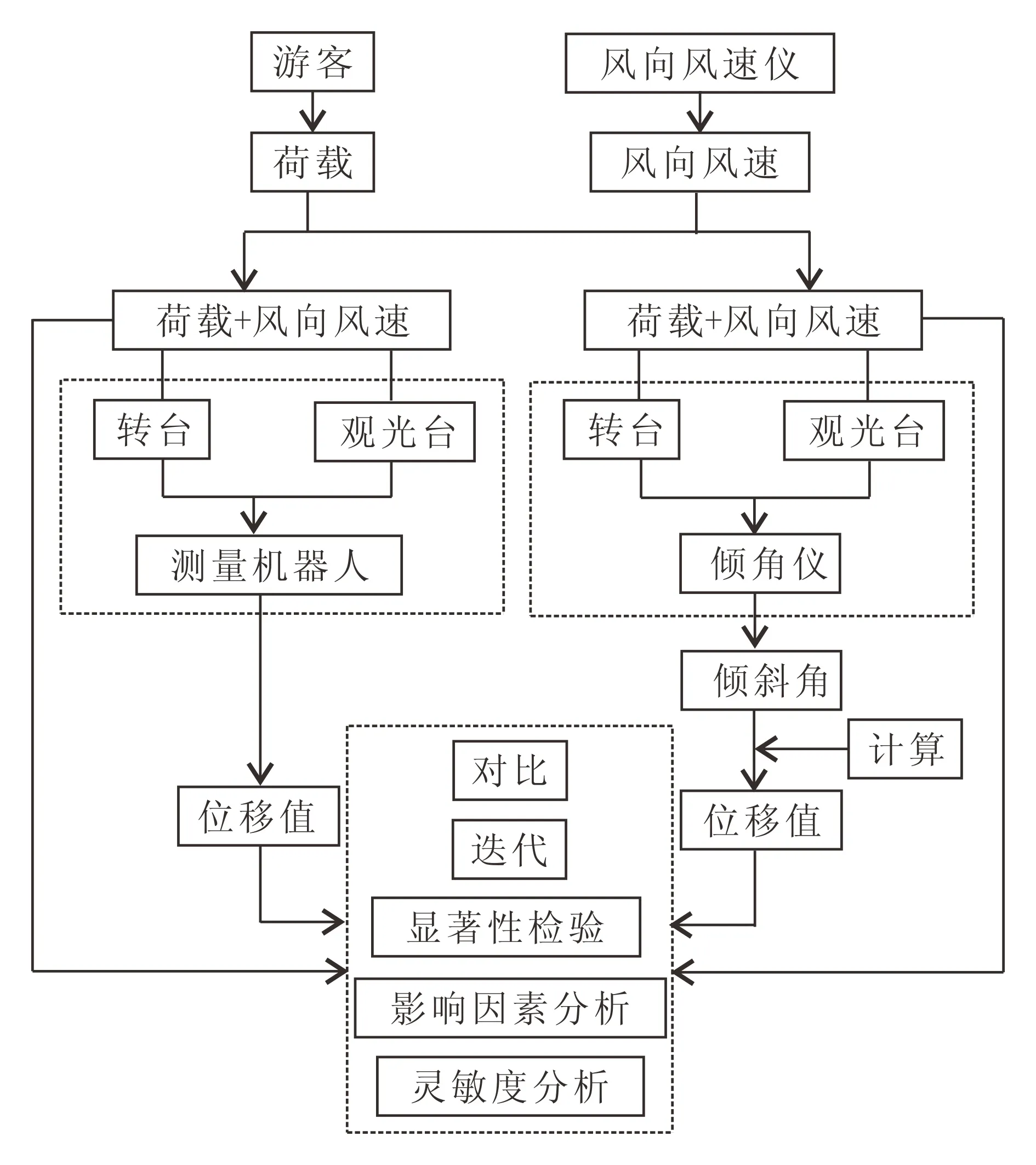
图3 设计方案流程图Fig.3 Flow chart of design scheme
2 数据采集
(1)荷载
当游客进入转台或观光台时,在d、e或f处询问游客体重,若游客进入则标记荷载增加,若离开则标记荷载较少,出现荷载变化时标记时间点。
(2)风向风速
利用DEM6轻便三杯风向风速仪测定转台和观光台风向风速,风速测量值为1 min时域内的平均风速。测量时,手持风向风速仪并将握把底端贴在转台或观光台护栏顶端,保持仪器在1 min内相对静止,测定完成后,对应时间点做好记录。
(3)位移量(测量机器人)
定义廊桥转台与顶层观光台Y轴方向皆为人行道垂直方向。测量机器人Y轴方向与定义Y轴方向相同,按照左手螺旋原则建立独立空间坐标系,两次测量的时间间隔为30 s。由于廊桥观光台部分变形较大,故对观光台加测点以获取多余观测值(图4、图5),并对合作目标的三轴位移量进行记录。
(4)倾斜角(倾角仪)
将倾角仪固定在转台或观光台后(内置Y轴与定义Y轴平行),通过终端与笔记本电脑相连,读取倾角仪测得的Y轴和X轴倾斜角,设定两次读取倾角值时间间隔同为30s。读取倾角值后,随即计算出位移量[11]。位移量的计算,通过正弦定理由倾斜角度值和高度值得出,计算式为:

图4 位移测量示意图(转台)Fig.4 Schematic diagram of displacement measurement(turn table)

图5 位移测量示意图(观光台)Fig.5 Schematic diagram of displacement measurement(sight seeing platform)
Δx=L·sinα
Δy=L·sinβ
(1)
式(1)中,Δx和Δy分别为X方向和Y方向位移量,L为转台或观光台高度,α和β分别为X方向和Y方向倾斜角。
3 数据处理与分析
3.1 测量数据显著性检验
对测量机器人与倾角仪所测数据作联合分析,分别得出最小值、最大值、第二高值、第三高值、中数、众数、平均数、标准差和变异系数,并对变异系数进行分析(表1),绘制出两组数据的对比变化曲线图(图6)。
通过分析,无论测量机器人还是倾角仪的测量数据变异系数都较大,但各时段不同位置处两种测量方式所得位移均值相差均<0.5 mm,说明两种测量方式反映廊桥变形程度较一致。而由于测量初期游客较少或风速较小等外界因素,测量数据都存在较高极值,且极值变化梯度较大,变异系数也较大(均>15%),很难服从正态分布,不利于准确分析两种测量方式的差异性,故采用迭代处理法对数据进行极异常点剔除[12,13]。即,以和为上限和下限对极高和极低值进行剔除,通过重复计算、剔除直到无极值剔除为止,得出理想数据,计算得出迭代后对比数据变异系数分析表(表2),并绘制迭代后数据对比变化曲线图(图7)。

表1 原始数据变异系数分析表
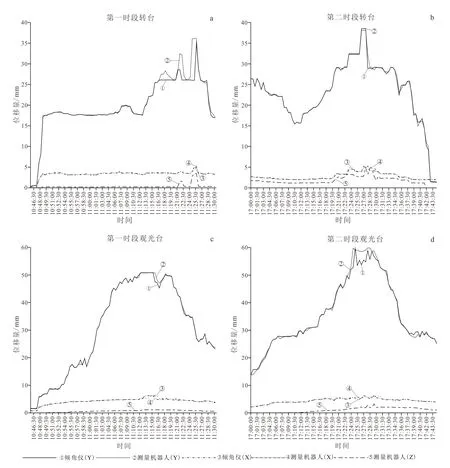
图6 数据对比曲线图Fig.6 Data contrast curves

模式第一时段转台第二时段转台第一时段观光台第二时段观光台Y/%X/%Y/%X/%Y/%X/%Y/%X/%测量机器人6.73.712.711.631.99.119.310.3倾角仪6.54.312.213.831.67.719.310.4
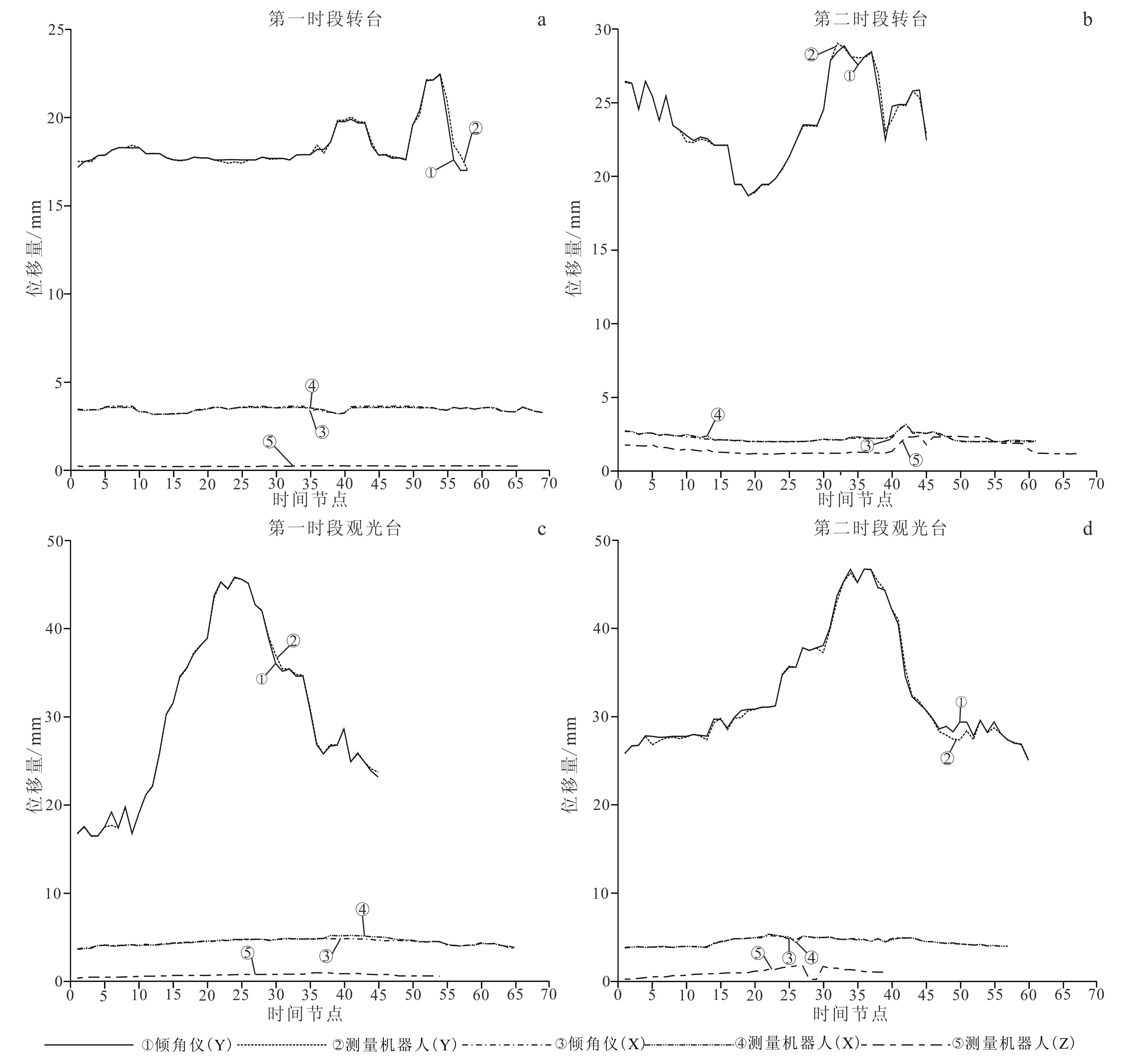
图7 迭代处理后数据对比曲线图Fig.7 Data comparison graph after iterative processing
剔除极值后两组数据各项变异系数基本<15%,数据离散程度较小,说明倾角仪和测量机器人对廊桥变形的监测较一致。即在廊桥正常使用情况下倾角仪和测量机器人都能以较高精度反映其变形情况。

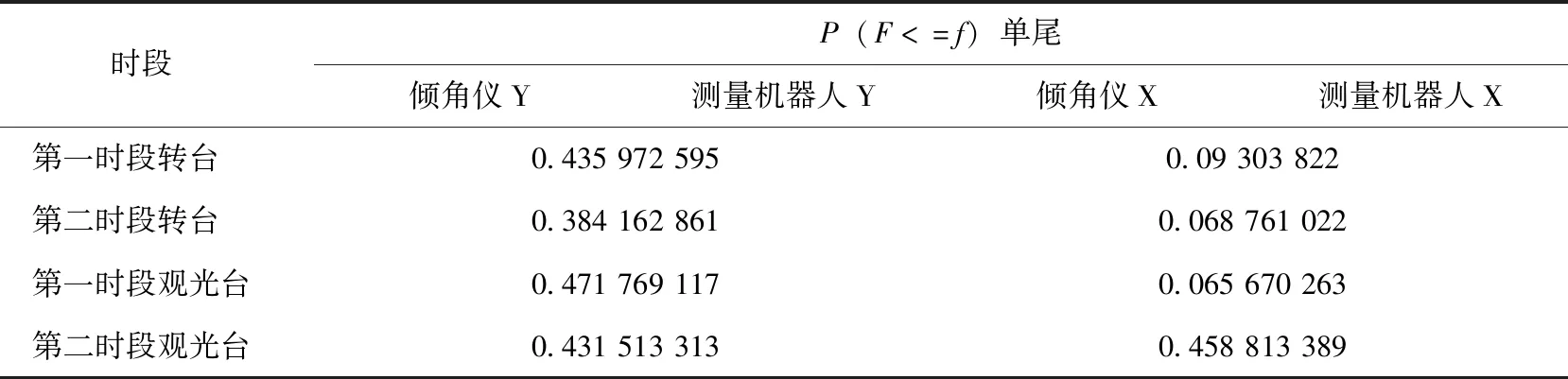
表3 显著性差异分析表
各时段P值皆>α值,则两样本总体方差无显著性差异,即方差齐次,数据具有较高一致性,说明倾角仪和测量机器人所测廊桥变形数据较吻合。
3.2 影响因素与灵敏度分析
本文采用正交试验法对各因素对廊桥的变形贡献大小进行分析,设试验因素为:荷载(A)、风向(B)、风速(C),水平为3,故因素水平为3因素3水平(假定因素间无相互作用)。同时,为了便于试验进行以倾角仪Y方向观测数据(位移量)作为试验指标(单指标),并选择符合选表要求的L9(34)作为本次试验的正交表,计算试验分析项Ki、ki和R(极值),计算为[15,16]:
(2)
R=max{K1,K2,K3}-min{K1,K2,K3}
(3)
式中,Ki表示任一列上水平号为i时,所对应的试验结果之和;S为任一列上各水平出现的次数;R为极值,其值越大说明因素越重要,最后得出直观分析计算表(表4)。
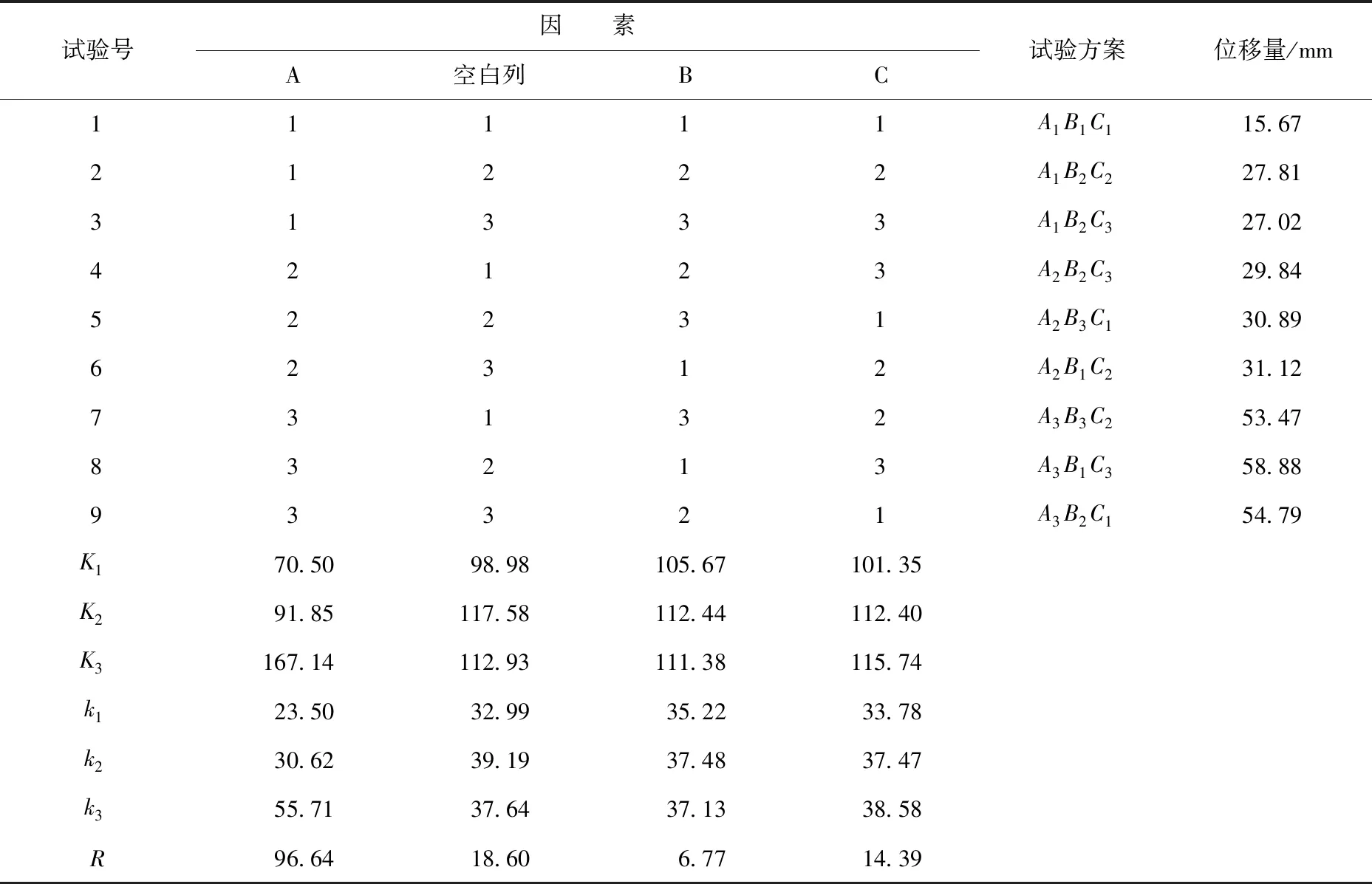
表4 正交试验分析计算表
由表4知,各因素对应R值大小关系为A(荷载)>C(风速)>B(风向),说明荷载是影响廊桥变形的主要因素,风速次之,风向最小。同时,空白列R值较小,说明本次试验无重要因素遗漏且因素之间无较强交互作用。
由于荷载和风速是影响廊桥变形的主要因素,故当廊桥出现人员变化或风速突变时往往会引起廊桥的变形量增大,则更迅速、灵敏地反映廊桥的实时变形情况是应对突发情况(人流量过大、风速突增)和进行人员安全保障、设施财产保障的有力手段[17,18]。本文采用判断时间节点的方式,每时段随机取荷载和风速所对应的2个剧烈变化点,当荷载或风速变化时通过判断倾角仪或测量机器人各方向的测量值是否准时变化,来测试倾角仪和测量机器人反映荷载和风速变化的灵敏度(表5)。由表5知,当荷载或风速突变时,倾角仪测量的时间延迟较小,针对荷载和风速的测量灵敏度均高于测量机器人,即倾角仪更能准时地反映廊桥的形变,具有明显的测量优势。

表5 灵敏度分析表
4 结论
(1)利用倾角仪能够获得较高精度的廊桥变形数据,且与测量机器人所测数据之间具有较高一致性,数据较吻合。
(2)荷载和风速是影响异形桥变形的重要因素,是研究旅游区异形桥变形的重要参考量。当荷载和风速变化带动异形桥发生位移量突变时,倾角仪能够较测量机器人更加灵敏地反映其实时变化。
(3)倾角仪和测量机器人联合作业模式在异形桥的变形监测中虽然可以提高工作效率、提高数据的可信性,对异形桥、超高构筑物等的变形监测中有较高推广性,但是其观测数据存在极值变化梯度大、很难服从正态分布等缺点。