2017款捷豹XJ车自适应减振系统简介
2019-07-09
2017款捷豹XJ车配备了自适应减振系统,它是一种电子控制的悬架系统。如图4所示,集成式悬架控制模块接收来自3个车身垂直加速计、4个悬架高度传感器和其他系统模块的信号,借以计算车辆状态、悬架状态及驾驶人操作输入。集成式悬架控制模块使用这些信号将各减振器的减振特性控制在适当水平,从而改善车身控制和车辆驾乘舒适度。
1 自适应减振系统组成部件及功用
1.1 减振器
自适应减振器为充油和气体的单管装置,它与传统的螺旋弹簧(前悬架)或空气弹簧(后悬架)集成在一起,形成了弹簧和减振器总成。减振器特性持续可变,因而允许在驾驶车辆的过程中,对减振力进行电动调节,实现车辆控制和驾乘舒适度之间的最佳平衡。
所有减振器都具有电气接头,其位置在活塞杆的端部、顶部安装架的中心。在各减振器中,减振调节通过由可变节流孔操纵的电磁阀来实现,该节流孔为减振器内的油液流动打开另一条通道。当电磁阀关闭后,旁路关闭,所有液压油全部流过主阀。当电磁阀开启后,克服弹簧弹力移动衔铁和控制叶片,控制叶片上有一个节流孔,叶片滑入烧结的腔体内以按要求打开旁路。
如图5所示,当电磁阀通电且减振器进入压缩过程时,一部分液压油从减振器下部流入中空的活塞杆、软阀、滑动腔体和节流孔,然后进入减振器的上部,从旁路通过主阀。在回升过程中,液压油沿相反方向流动。平行作用的两个阀门可以确保减振器以一个更柔和的状态工作。减振器在这两个界限条件之间持续工作。各减振器中的电磁阀由来自集成式悬架控制模块的526 Hz独立脉宽调制(PWM)信号操纵。当模块完全启动后,它使用1.5 A电流来操控柔性设置下的减振器。当断电后,减振器处于刚性设置。集成式悬架控制模块持续不断地变更PWM信号电流,从而视需要分别增大或减小各减振器的减振能力。
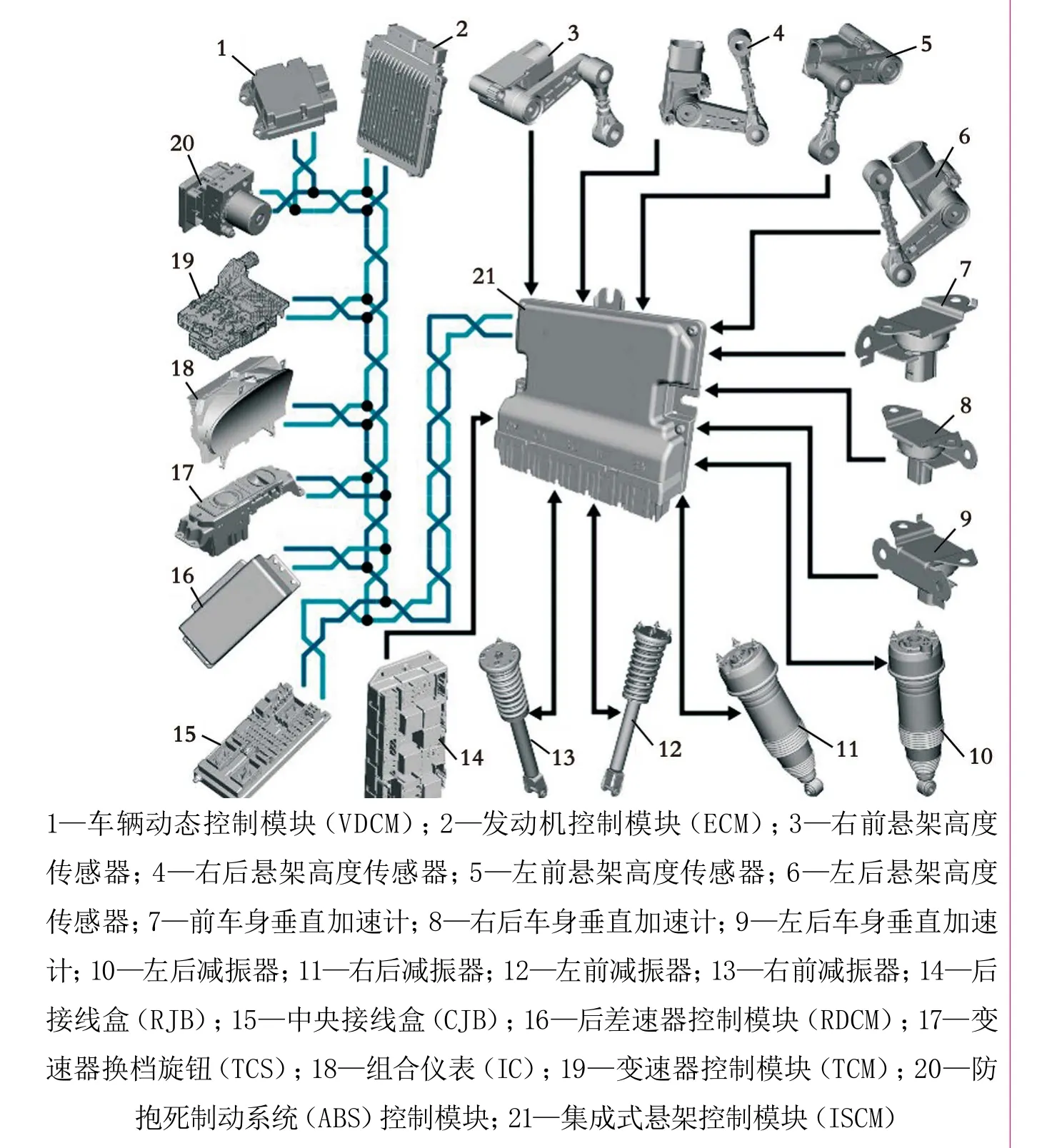
图4 自适应减振系统控制框图

图5 减振器工作过程
1.2 集成式悬架控制模块
集成式悬架控制模块安装在行李箱右侧后侧围板的一个支架上。集成式悬架控制模块监测输入信号,根据输入信号控制各个功能,并计算每个功能下各减振器所需要的动力,进而操作减振器电磁阀。具体控制功能如下。
(1)车身控制。利用车身垂直加速计和CAN总线信号输入,1 s内100次计算道路诱导的车身运动,并将各减振器设置为适当水平,从而保持车身姿态水平,提高车身控制能力。
(2)侧倾率控制。利用CAN总线信号输入,1 s预估由驾驶人执行转向输入引起的车辆侧倾率100次,然后增大减振作用以减小侧倾率,从而提高控制能力。
(3)纵倾率控制。利用CAN总线信号输入,1 s预估由驾驶人执行加速和制动输入引起的车辆纵倾率100次,然后增大减振作用以减小纵倾率,从而提高控制能力。
(4)颠簸弹跳控制。利用悬架高度传感器和CAN总线信号输入,1 s内500次监测车轮位置,随减振器接近其行程末端而增大减振率,进而提高驾乘品质。
(5)车轮跳动控制。利用悬架高度传感器和CAN总线信号输入,1 s内500次监测车轮位置,检测何时车轮处于其正常频率,并增大减振率,进而提高驾乘品质。
1.3 车身垂直加速计
自适应减振系统中使用了3个车身垂直加速计(1个前车身垂直加速计和2个后车身垂直加速计),前车身垂直加速计安装在右前轮之后的前纵梁上,2个后车身垂直加速计分别安装在行李箱两侧的后侧围板上。车身垂直加速计测量垂直平面上的加速度,并向集成式悬架控制模块输出相应的模拟信号。集成式悬架控制模块中的算法可计算车辆的起落、俯仰和侧倾动作,用于控制车身模式。
每个车身垂直加速计通过3根导线连接到集成式悬架控制模块,3根导线分别为搭铁线、5 V电源线和信号线。感测元件由单一平行板式电容器组成,其中一块板根据施力(加速度)相对另一块板移动,这使得电容变化能够反映实施的加速度。此电容与电桥电路中的固定参考电容器加以比较,信号由专用集成电路处理,以便产生能够反映施加的加速度的输出电压。
1.4 悬架高度传感器
自适应减振系统中使用4个悬架高度传感器,其中2个传感器用于前悬架,另外2个传感器用于后悬架。在各悬架高度传感器上,传感器臂和传感器连杆将悬架的线性运动转换为传感器轴的旋转运动。悬架高度传感器测量车辆各角上的悬架的位移,并向集成式悬架控制模块输出相应的模拟信号。集成式悬架控制模块计算信号的位置、速度和频率要素,并将这些结果用于各个车轮控制。
每个悬架高度传感器都通过3根导线连接到集成式悬架控制模块,分别为搭铁线、5 V电源线和信号线。感测元件包含一组霍尔效应装置,这些装置用于测量连接在传感器轴末端的小磁铁的磁场方向。随着传感器轴的旋转,所连磁铁的磁通量线也随之旋转。每个霍尔效应元件发出的信号由专用集成电路来处理,从而产生体现传感器轴旋转信息的输出电压。
2 自适应减振系统故障
如果集成式悬架控制模块检测到故障,则会通过HS CAN总线向组合仪表发送信息,组合仪表将会显示“自适应减振系统故障”,集成式悬架控制模块内会存储相应的故障代码,集成式悬架控制模块将根据故障类型执行相应的控制策略。如果存在电源故障或集成式悬架控制模块无法控制减振器,则减振器将默认设置为刚性状态。如果一个传感器发生故障,且该传感器仅影响一个或多个控制模式,则一个中间减振器设置被用作设定的下限度,其余的工作模式可视需要请求较高的减振能力。
