空间反射镜结构轻量化设计研究
2019-07-08安鲁明张淑杰周成林贾建军
安鲁明,张淑杰,周成林,贾建军
(1.同济大学 航空航天与力学学院,上海 200092;2.中国科学院空间主动光电技术重点实验室,上海 200083)
0 引言
反射镜是空间光机系统的核心结构,对成像精度起到至关重要的作用。作为航天器组成结构,反射镜的质量越小则成本越低,但质量过轻会引起镜片变形过大,无法保证成像质量。因此,在设计阶段应对空间反射镜进行轻量化设计,在保证成像精度满足要求的前提下力求结构质量最轻[1,2]。
在国内外的反射镜轻量化设计中,目前被广泛采用的结构形式是背部轻量化孔的蜂窝结构,主要包括三角形孔、圆形孔和正六边形孔等[3~5]。这类结构在不同口径的反射镜设计中被普遍采用,简化了设计过程,但也存在一定的局限性,即忽略了反射镜口径的差异性,无法使轻量化率达到最高。
采用拓扑优化设计可以改进上述不足。通过对反射镜模型进行拓扑优化,得出使得反射镜质量最轻的材料分布方式,然后经详细优化得到反射镜各部位的厚度、高度等具体参数值。文献[6]在保留传统三角形轻量化孔结构的基础上做了进一步的拓扑优化,但优化结果形状过于复杂,加工难度很大。文献[7,8]从实体镜坯开始拓扑优化,但也存在两方面缺陷:一是轻量化孔的形状过于不规则,加工难度较大;二是在新结构与传统蜂窝结构的对比中强制控制变量,而实际上,传统结构在设计时也有参数优化,优化结果很难保证两种模型变量一致,控制变量没有现实意义。其中,文献[7]强制控制非设计区域具有相同参数,文献[8]强制控制质量相同来对比面形误差大小,两者都未对传统结构进行优化,因此对比结果缺少说服力。本文以空间望远镜次镜为研究对象,在上述研究基础上做了两方面的改进:一是在拓扑优化时增加制造工艺约束,设计出了一种新型轻量化反射镜结构;二是不强行控制变量,对传统蜂窝结构也进行了详细优化,综合对比质量与面形精度,让对比结果更具有说服力。
1 尺寸和材料
空间望远镜次镜在优化前是一块实体镜坯,图1为镜坯示意图,其口径为340mm,下方球面为反射面,轻量化设计用于减少反射面背部材料,该过程不改变口径和镜面形状。
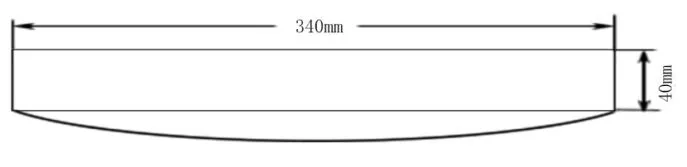
图1 次镜示意图
次镜材料选用碳化硅(CVD);材料参数如表1所示。镜坯总质量为14.74kg。

表1 材料参数
2 新型次镜结构设计
新型次镜结构设计包括拓扑优化设计和尺寸、形状联合优化设计两个步骤。
2.1 拓扑优化
用变密度法对镜坯进行拓扑优化,获得材料分布情况。如图2所示,次镜采用背部三点支撑,镜面和支撑孔部分作为非设计区域。取镜面厚度为8mm,支撑孔厚度5mm,支撑孔直径50mm。
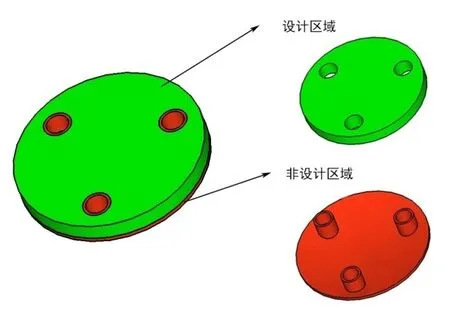
图2 设计区域和非设计区域
建立图3所示的镜坯有限元模型。对其进行拓扑优化。

图3 未经优化的次镜有限元模型
设计变量:设计区域内所有单元的密度(0~1)。
约束函数:1g加速度载荷下,反射面的节点的位移最大不超过1×10-5mm。
目标函数:体积分数最小。
为保证优化结果满足次镜制造加工条件,对优化过程添加制造工艺约束:
1)最小成员尺寸:15mm;(不小于3倍单元平均尺寸,预防过细传力路径)。
2)最大成员尺寸:40mm;(不小于2倍最小成员尺寸,预防材料堆积)。
3)拔模约束:设置拔模方向为轴向。
4)圆周循环对称。
拓扑优化结果如图4所示,该结果显示了最优的材料分布形式。
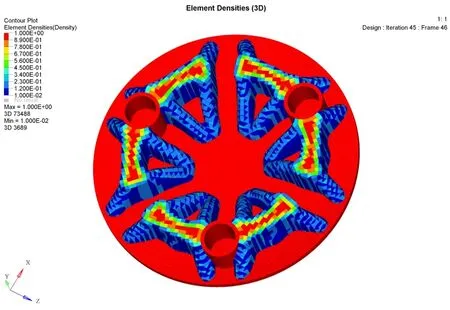
图4 拓扑优化结果
2.2 尺寸、形状联合优化
根据拓扑优化结果建立图5所示的次镜初始有限元模型。模型采用壳单元,出于结构稳定性考虑,图5在图4的基础上用环状外壁和内壁将筋板连接了起来。对初始模型进行尺寸、形状联合优化,需要优化的参数包括:外壁厚度t1、中壁厚度t2、内壁厚度t3、筋板厚度t4、支撑孔壁厚t5、镜面厚t6、外壁高变化量shape1、中壁高变化量shape2、内壁高变化量shape3。
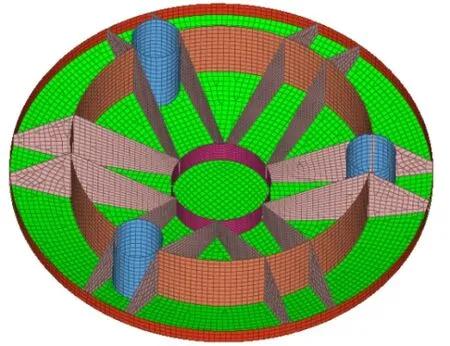
图5 拓扑优化后的次镜有限元模型
优化变量:t1、t2、t3、t4、t5、t6、shape1、shape2、shape3。
约束函数:1g加速度载荷下,反射面的节点的位移最大不超过1×10-5mm。
目标函数:质量最小。
表2为各参数的初值及优化结果,以此确定最终模型的详细几何参数。
3 传统次镜结构设计
传统三角形蜂窝结构次镜有限元模型如图6所示。为了与新型结构进行对比,对其进行尺寸、形状联合优化,需要优化的参数包括:支撑孔厚度t1、筋板厚度t2、外壁厚度t3、镜面厚度t4、镜体高度变化量shape。
优化变量:t1、t2、t3、t4、shape。
约束函数:1g加速度载荷下,反射面的节点的位移最大不超过1×10-5mm 。
目标函数:质量最小。
表3为各参数的初值及优化结果,以此确定最终模型的详细几何参数。

表2 新型次镜尺寸、形状联合优化参数值
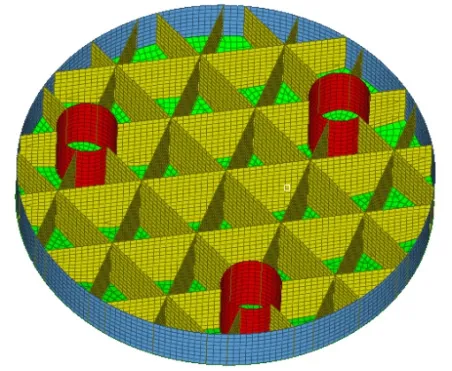
图6 传统次镜有限元模型
4 对比分析
对传统次镜结构模型和新型次镜结构模型分别进行以下三种工况的有限元分析:
工况一,沿Y向(轴向)施加1g重力加速度载荷;
工况二,沿X向(垂直轴向)施加1g重力加速度载荷;
工况三,沿Z向(垂直轴向)施加1g重力加速度载荷。
输出镜面节点变形数据,并计算PV值和RMS值,详细数据如表4所示。由表4可知,工况一对应的面型误差值比另外两种工况都要大,其中,传统模型的RMS值为2.62nm,新型模型的RMS值为2.60nm,两种模型的RMS值十分近似,在此前提下比较镜体质量,新型次镜结构为4.994kg,轻量化率为66.1%;传统次镜结构为5.932kg,轻量化率为59.8%。由此可见,基于拓扑优化建立的新型次镜结构在轻量化程度上比传统结构更有优势。作为航天器来说,新型次镜结构是一种更加经济的选择。
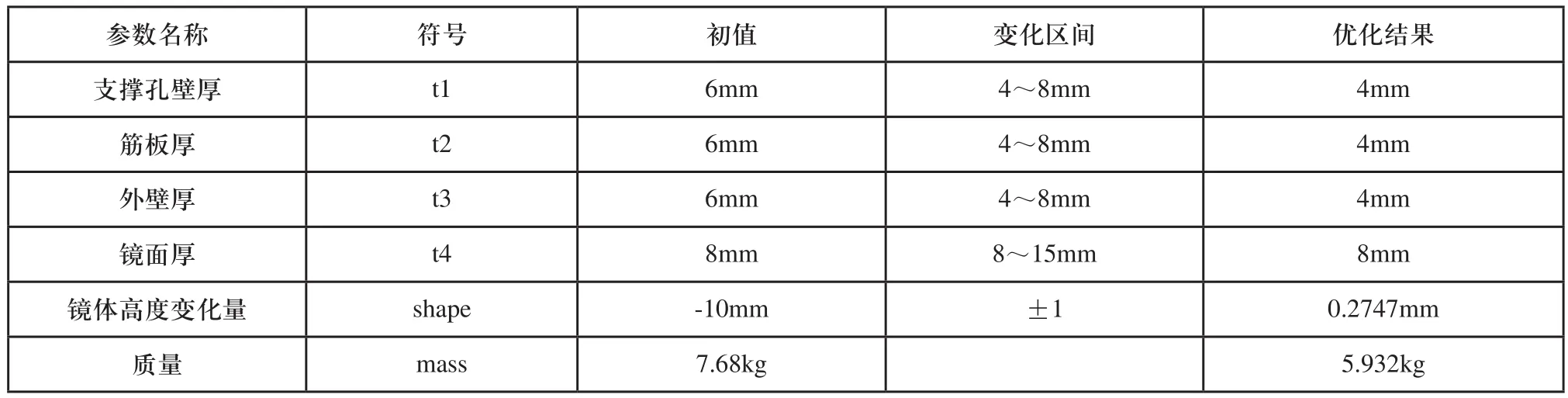
表3 传统次镜尺寸、形状联合优化参数值

表4 质量及面型误差数据
5 结束语
本文以空间望远镜次镜为例,运用拓扑优化及尺寸、形状联合优化设计出了一种新型空间反射镜轻量化结构;同时对传统三角形蜂窝孔结构进行了详细优化;通过新型次镜结构与传统次镜结构的对比分析可知,两者的面形精度十分近似,但新型结构的轻量化率更高。因此,通过拓扑优化的出的次镜结构更具应用优势。
