电池动力重载四足机器人复合电源设计与仿真
2019-07-08王利涛徐震宇
王利涛,李 毅,徐震宇,罗 欣,王 雷
(1.华中科技大学 数字制造装备与技术国家重点实验室,武汉 430074;2.内蒙古第一机械集团有限公司科研所,包头 014030)
0 引言
随着微型计算机技术、传感技术、人工智能与控制理论等方面的发展,四足机器人的发展不再满足于低速的静态步行,而日益追求能够类似生物灵活性的更高的速度和更好的动态性能[1];四足机器人快速运动时,可将腿足运动状态分为飞行相和着地相,当处于飞行相时,由于自身的动能和势能的相互转化,腿足消耗的能量较小,能源供给系统提供的能量也较小。当处于着地相时,由于与地面接触冲击和腿部阻尼产生了较大的能量消耗,为了四足机器人稳定运动,机器人的能量供给系统需为其提供足够的能量,补充由于地面冲击和腿部阻尼产生的能量损失[2]。
对于高速运动的电池动力重载四足机器人来讲,由于其运动速度较快和重量较大,导致其与地面冲击更频繁且地面冲击损耗和腿部阻尼损耗也更大,动力电源系统需频繁提供较大的能量供给驱动系统,显然普通的锂电池无法满足使用要求,亟需具有较大功率密度和能量密度的电源作为其动力电源;本文从重载机器人功率特性分析出发,结合锂电池和超级电容的特性,设计满足重载电池动力四足机器人的复合电源系统,并根据轻量化、经济性和动力性要求,进行了优化匹配,制定了相应能量管理控制策略,并进行了仿真验证。
1 基于典型工况仿真的四足机器人运动能量需求分析
1.1 机器人结构与驱动配置
由图1、图2可知,电动四足每条腿有三个自由度,分别是侧摆关节、髋关节和膝关节;侧摆关节、髋关节驱动电机通过减速器为关节提供驱动力;膝关节驱动电机利用四连杆传动机构、减速器为膝关节运动提供动力;为使得机器人结构紧凑,提高机体内部空间利用率,将电机驱动器、动力电池、超级电容等放置于机器人躯体内部,各电气设备通过电缆连接。
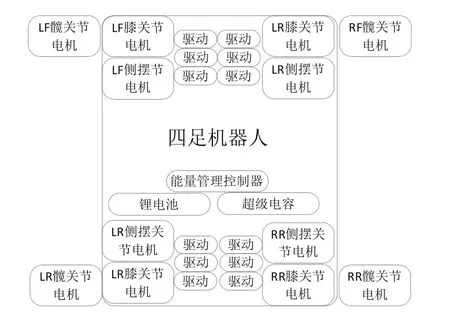
图1 四足机器人动力系统框图

图2 四足机器人三维模型
1.2 典型运动仿真
四足机器人典型平地行走步态为walk步态和trot步态等,其中walk步态行走速度较慢,对电机和电源的要求不高,为使设计的电源系统可满足多工况运行要求,本文搭建了基于MATLAB的电动四足机器人运动/动力学仿真平台,如图3所示,四足机器人总重量510kg,其中载重150kg,本文选择在trot步态以要求的最高速度2.1m/s的工况下进行了仿真,仿真结果如图4所示。
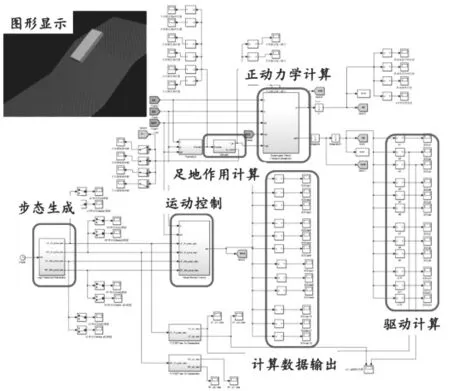
图3 MATLAB动力学运动学仿真平台
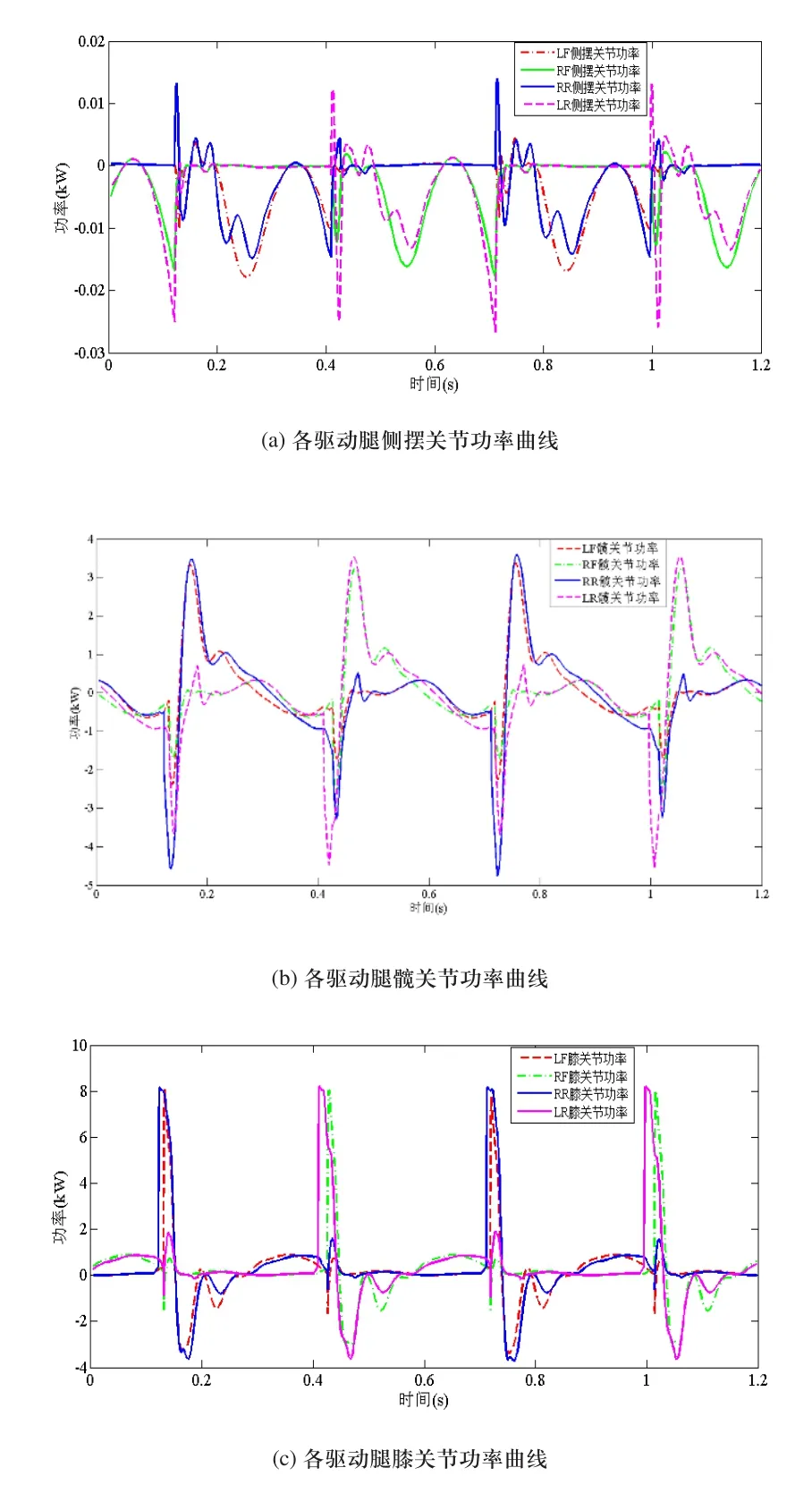
图4 最大速度下各关节功率曲线图
图4(a)为运动过程中侧摆关节的功率曲线,由图可知,在平地行走工况下,侧摆关节只是启到稳定支撑的作用,没有参与运动过程,故功率较小,本文不做过多讨论。
图4(b)~图4(c)为在高速运动中驱动腿膝关节和髋关节功率曲线,由图可知,对角腿具有相同的运动方式,运动过程中四条驱动腿的髋关节和膝关节功率变化趋势相同,摆动腿的关节功率高,支撑腿功率低,摆动腿和支撑腿在一个步态周期内交替变化,步态周期约为0.6s;同一条腿的膝关节和髋关节功率相位正好相反,反应了大腿和小腿之间的运动关系。
图5反映了关节驱动状态和制动状态能量传递方向和路径,关节制动状态产生的负功可以通过直流母线传递至驱动状态和动力电源,综合考虑能量传递路径中各部件的效率,得出如图6所示的整机需求电源功率。
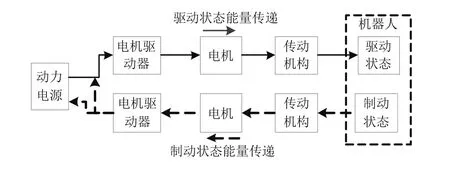
图5 制动和驱动状态能量传递图
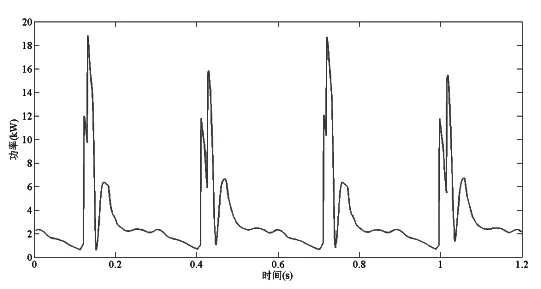
图6 整机需求电源功率曲线
图6可知,在trot步态高速运动时步态周期约为0.6s,峰值功率18.8kw,最小驱动功率0.597kw,平均功率3.3245kw,驱动时峰值功率约为最小值的31.5倍,约为平均功率的5.65倍,且功率交变频繁,属于典型的过载系数大,载荷强交变运动系统。
2 动力电源系统设计与优化匹配
锂电池具有能量密度大、费用低等优点,缺点是放电倍率低和高倍率放电会大幅缩短使用寿命[2],本项目强交变、过载系数大的使用环境和功率特性,如选用锂电池作为单一能源势必造成锂电池组的容量过大,从而导致动力电源的重量和成本的大幅增加。而超级电容器在充放电过程中不存在电化学反应,具有充放电速度快、循环次数多、高倍率充放电、内阻较小等优点,缺点是能量密度小[3],与锂电池形成很好互补。基于以上分析,本文采用超级电容和锂电池结合构成的复合电源作为电机驱动四足机器人的动力电源,充分发挥锂电池能量密度大,超级电容功率密度大的优势,既能提高瞬时高功率的输出,又能具备持久的动力性能。
2.1 动力电源组成方案
本文采用如图7所示的复合电源系统结构,该结构可以发挥超级电容反应快速、高倍率放电和锂电池能量密度大特性,通过检测超级电容两端电势的变化,通过改变DC/DC的输入输出特性与超级电容进行配合,使得锂电池输出功率得到质的改变[4]。此外,DC/DC仅控制远小于直流母线放电电流的锂电池放电电流,这样所需DC/DC变换器的容量大大减小,有利于降低成本和重量,提高可靠性;不仅如此,由于超级电容承受了短时高倍率放电电流,也有效降低了DC/DC变换器快速型和性能指标的要求,减少了研究风险[5]。
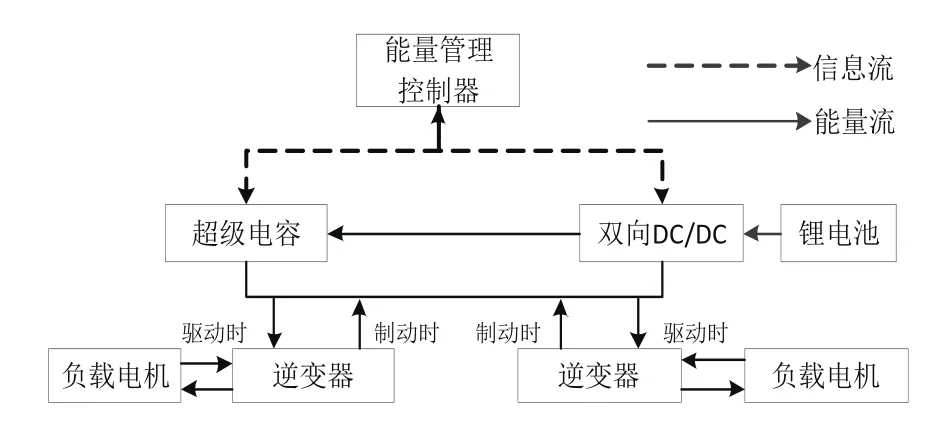
图7 复合电源设计方案
2.2 复合电源的建模
2.2.1 锂电池模型
本文建立锂电池模型时假设串并联成组的电池单体参数完全一致,且不考虑电池不一致性的影响。将锂电池等效成二阶RC等效电路,如图8所示。
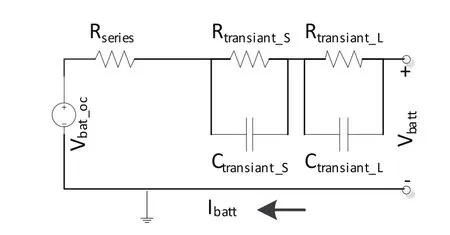
图8 锂电池等效电路模型
锂电池输出电压表达式为[6]:
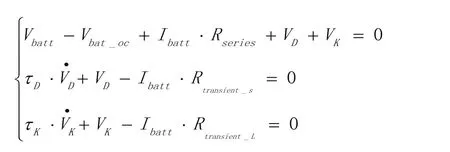
式中:Vbatt为锂电池的输出电压,Vbat_oc为锂电池的开路电压,ibatt(t)为锂电池的负载电流,Rseries为锂电池内阻,VD为电化学极化电压,VK为浓差极化电压,τD和τK为等效时间常数,Rtranssient_L,Rtranssient_S为模拟计划电阻,Ctranssient_L,Ctranssient_S为模拟极化电容,模型中两个RC电路模拟电池的瞬时响应。
锂电池的荷电状态可表示为[7]:

式中:SOCbat0为锂电池初始时刻的荷电状态,Cbat为锂电池的实际容量。
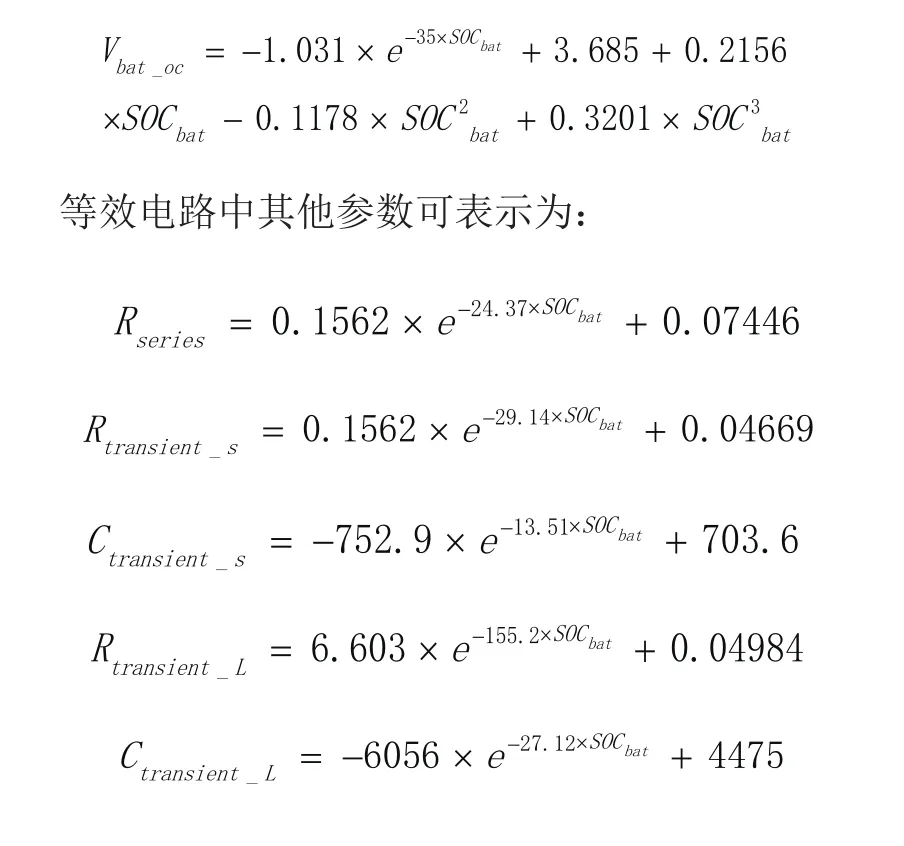
锂电池的开路电压的表达式为[8]:
2.2.2 超级电容模型[9]
忽略超级电容自放电因素,本文所采用超级电容的等效电路,如图9所示。
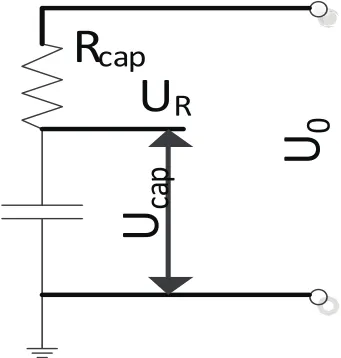
图9 超级电容等效电路
超级电容的充放电功率可以表示为:

式中:Vcap(t)为电容的电压,Icap(t)为超级电容放电电流,Rcap为超级电容内阻,可以证明超级电容充放电功率与充放电电流成正比。
超级电容工作电压可表示为:
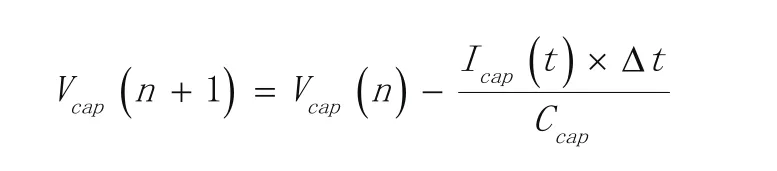
式中:Ccap为超级电容容量,Δt为放电持续时间。超级电容荷电状态可表示为:
式中:Vcap_min表示电池放电截止电压,Vcap_max表示电容最大允许电压,为减小直流母线电压变化范围,本文取Vcap_min=2.4,Vcap_max=2.85。
2.2.3 基于MATLAB遗传算法的复合电源系统地优化匹配研究
满足电动四足机器人以trot步态高速运行一定里程的要求,必须同时满足提供运动里程所需要的足够能量、运动过程任意时刻的功率和整机的用电体制的要求[10]。
1)功率约束
达到运动里程时,锂电池放电深度为DODbat,此时复合电源系统仍需为动力系统提供最大功率应不小于需求最大功率的输出,即:

式中:Pbat_max(DODbat)表示电池放电深度为DODbat时所能输出的最大功率,Pcap_max表示超级电容所能提供的最大功率,Pneed_max机器人需求峰值功率, b1表示电池单体串联数量,b2表示电池成组并联数量,c1表示超级电容单体串联数量,c2表示超级电容并联数量,ηDC表示DC/DC放电效率,本文约定ηDC=0.95。
2)能量约束
由于超级电容能量密度远低于锂电池,因此本文忽略超级电容初始能量,故要达到运动里程要求,锂电池应提供不小于机器人运动所需要的能量值,即:

式中:Ebat(DODbat)表示单体放电深度为DODbat时电池释放的能量,S表示行驶里程,V表示trot步态速度,Pneed_avr为速度V下的trot步态所需平均功率,ηbat为电池放电效率,本文取ηbat=0.94。
3)电压约束
超级电容的最低工作电压应能满足用电设备的最小工作电压,且不大于额定电压;锂电池的最低工作电压应不小于DC/DC变换器最小允许电压,且不大于DC/DC变换器额定电压,如下式。
式中:VDmin、VDnom分别代表用DC变换器的最低允许输入电压和额定电压,Vmin和Vnom代表用电设备的最低允许工作电压和额定电压,Vbmin、Vcmin代表锂电池和超级电容单体最低电压,Ceil代表向上取整,Floor代表向下取整。
4)目标函数
由于电动机器人系统对经济成本和重量成本具有较为严格的要求,因此本文选取成本指标和重量指标构建目标函数,作为选择串联和并联数量的依据。
式中:λc和λm表示经济成本和重量成本权重系数,mb、mc表示锂电池单体和超级电容单体重量,cb、cc表示锂电池单体和超级电容单体价格。
5)基于MATLAB遗传算法复合电源优化匹配
遗传算法(GA)[11]是一种智能算法,基于模仿生物进化的自然选择过程求解无约束和有约束非线性优化问题。该算法反复修改由个体解构成的群体。在每个步骤,遗传算法从当前的群体随机选择个体,并将它们用作父级来生成下一代子级。经过一代又一代后,该群体“演化”为最优解。
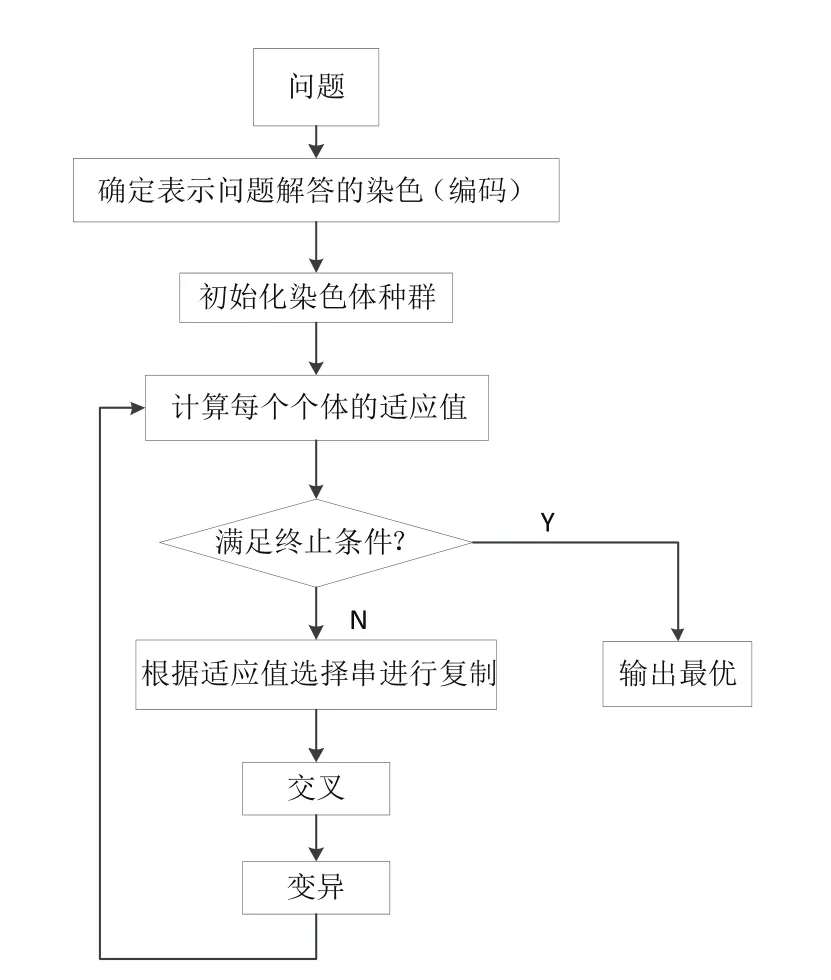
图10 遗传算法流程图
本文的优化问题是基于约束的非线性整数规划问题,故本文基于MATLAB遗传算法对复合电源系统进行优化匹配,使目标函数F取值最小,算法中的各参数为:种群规模:M=20,交叉概率:Pc=0.8,变异概率:Pm=0.2,停止代数:T=100,超过连续迭代次数不进化算法停止:T=50,超过连续时间不进化算法停止t=20s。
锂电池和超级电容单体参数如表1和表2所示,目标函数中选择经济成本和重量成本的权重为0.3和0.7,将行驶里程、功率要求和系统电压工作范围等参数带入各约束中。
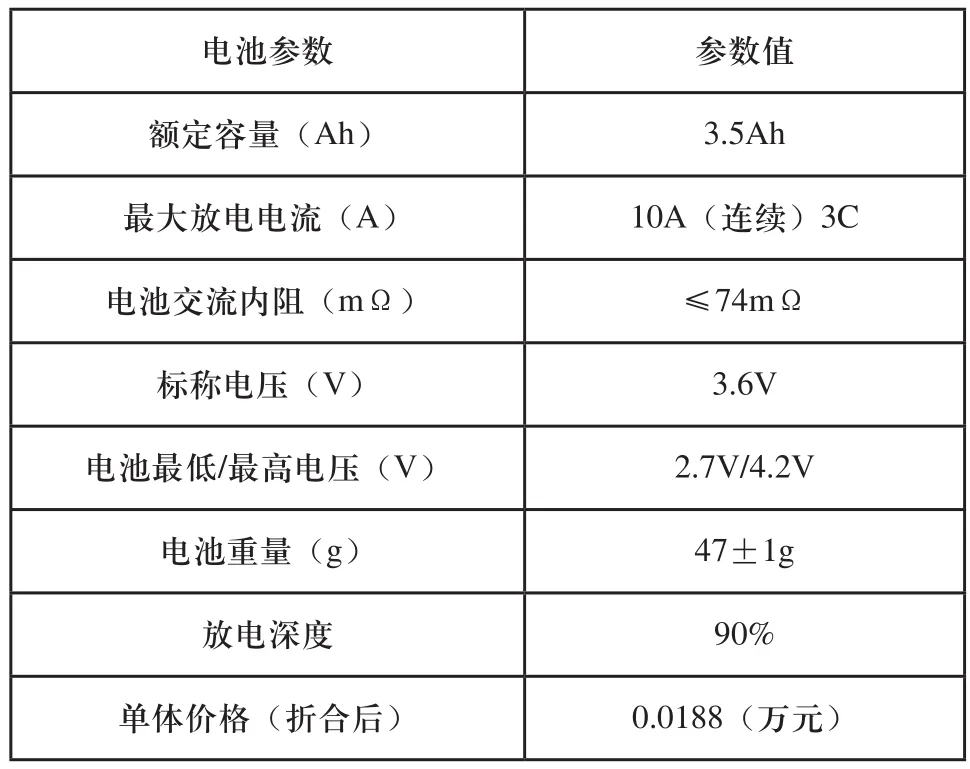
表1 锂电池参数表
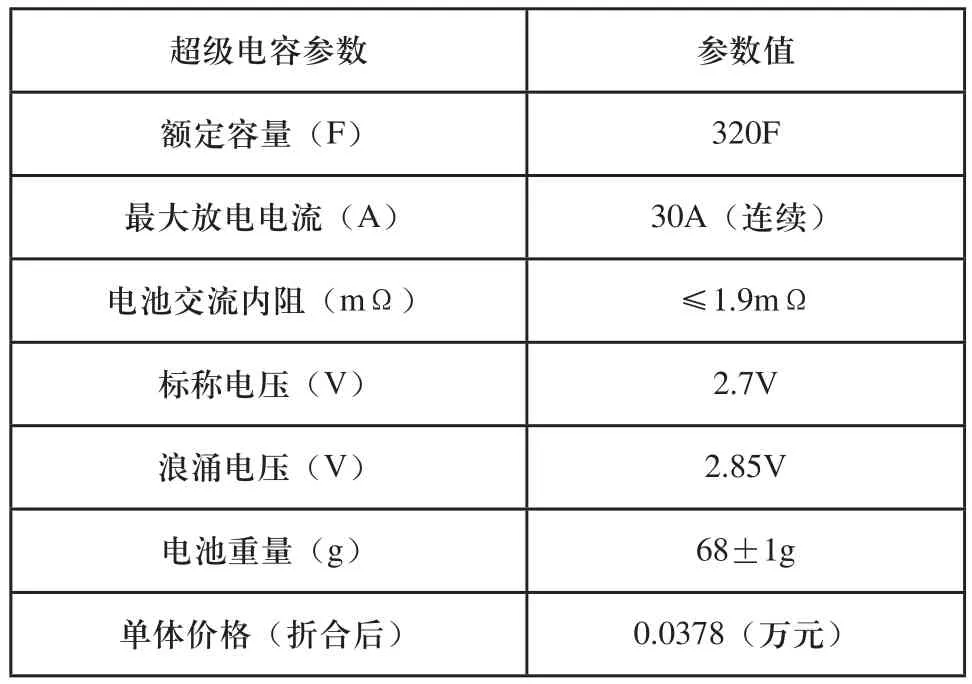
表2 超级电容参数表
图11为种群迭代曲线,由图可知,种群均值在开始迭代时波动较大,之后慢慢趋于平稳,经过51次迭代达到了最优值,此时权重函数取值为21.7535,优化结果如表3所示。

图11 遗传算法种群均值迭代曲线

表3 化后的锂电池和超级电容匹配表
3 仿真验证
由图5可知,trot步态高速行走时,复合电源在每个步态周期需提供最高18.8kw的功率,根据功率匹配原则,表4给出了电池SOC特征点处,需要超级电容SOC的最小值。

表4 电池SOC和电容SOC匹配表
据此,本文制定了基于超级电容SOC的门限值控制策略,如图12所示,并进行了仿真。
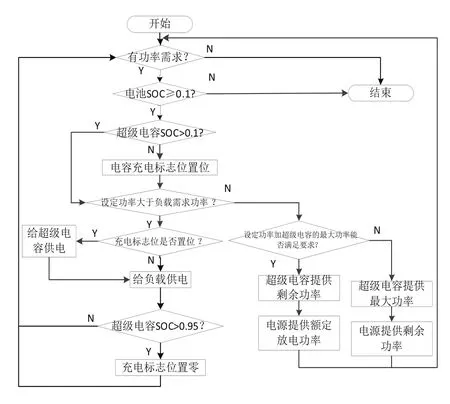
图12 能量管理控制策略
仿真结果如图13、图14和图15所示,根据仿真结果可以看出:
1)复合电源能够较好的满足车辆行驶的动力需求,当超级电容工作范围在设定范围之内时,锂电池提供了主要动力输出,超级电容只有在大功率输出时参与工作,实现了超级电容的“削峰”作用,降低了锂电池输出峰值功率。
2)当超级电容工作范围低于设定范围,锂电池保持恒定功率输出,除提供驱动需求功率外,同时给超级电容充电,由于超级电容具有瞬时大功率输出特性,当大负载时,输出较大功率,辅助锂电池的工作,当充电到超级电容SOC为0.95时,停止充电。
3)锂电池SOC变化较为平稳,呈直线下降趋势,表明锂电池工作正常,持续为负载电机供电,超级电容SOC呈现有规律的波动状态,满足表4的电池SOC和超级电容SOC的匹配要求,表明超级电容的充放电基本符合控制策略对复合电源的要求。

图13 Trot步态时电池SOC、电容SOC变化曲线
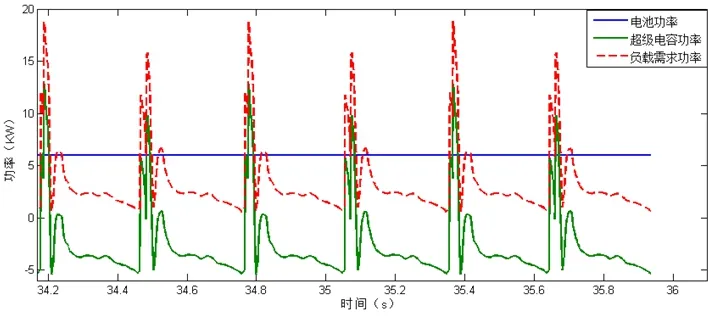
图14 电容充电时功率曲线
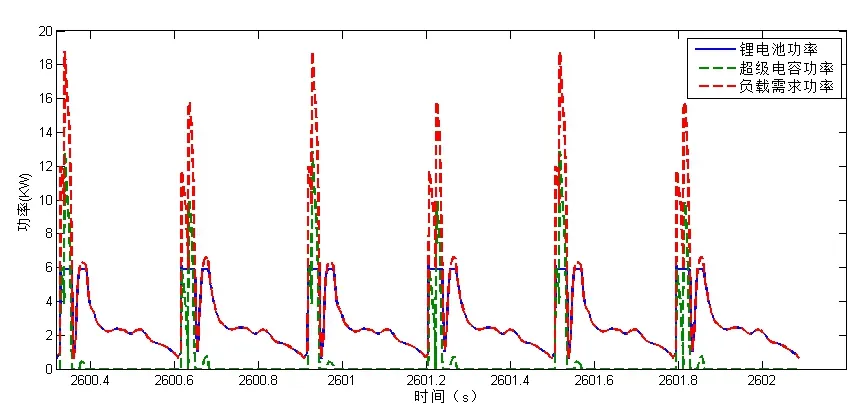
图15 电容放电时功率曲线
4 结论
本文针对电机驱动四足重载机器人,根据高速trot步态典型工况仿真,电机驱动四足重载机器人属于过载系数大,载荷强交变运动系统,综合分析锂电池和超级电容的放电特性,确定了由锂电池和超级电容构成的复合电源作为本项目的电源系统。
根据复合电源的功率约束、能量约束、电压约束和重量、质量成本目标函数,采用MATLAB遗传算法进行了动力电源系统地优化匹配,确定了复合电源中锂电池和超级电容的成组构成。
建立了复合电源的数学模型,制定了基于超级电容SOC门限值的控制策略,并对复合电源系统进行仿真,仿真结果表明,复合电源和能量管理控制策略能够很好的满足动力系统的用电需求。
