一种用于海洋要素反演的机载SAR多普勒中心偏移计算方法
2019-07-06赵现斌艾未华
赵现斌 严 卫 艾未华 陆 文 马 烁
(国防科技大学气象海洋学院 长沙 410073)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种全天时、全天候的主动式微波侧视成像雷达,它通过合成孔径原理提高方位向分辨率,采用脉冲压缩技术提高距离向分辨率,获取高空间分辨率的探测图像。作为一种先进的微波遥感探测器,SAR已经广泛应用于军事侦察、地质测绘和海洋环境探测等领域[1]。SAR探测数据中,雷达后向散射系数代表回波的强度信息,主要应用于海洋环境要素反演研究[2–4];而多普勒中心频率代表探测回波的相位信息,直接影响图像信噪比、方位模糊信号比以及成像后的目标位置,主要应用于雷达成像领域[5]。
近几年,随着搭载平台测量设备测量速度和精度的提高,人们在处理SAR探测回波数据时发现,平台运动状态数据计算的多普勒中心频率和海洋探测回波数据计算的多普勒中心频率始终存在特定差异,并开始认识到这种差异可能来自于海洋表层运动的影响。基于这一假设,学者们将SAR平台运动状态数据和海洋探测回波数据计算多普勒中心频率存在差异定义为多普勒中心偏移,并据此开展了海面风场[6]、海表流场[7,8]等海洋环境参数反演研究。
在多普勒中心频率计算研究方面,针对平台运动状态数据,Raney[9]和Bezvesilniy等人[10]分别提出了星载、机载SAR多普勒中心频率计算方法。针对探测回波数据,研究人员按照探测回波数据处理的不同阶段,提出了多种多普勒中心频率计算方法,包括距离向压缩前[11,12]、距离向压缩后和方位向压缩前[13]以及距离向和方位向压缩后[14,15]等算法。
然而,目前针对多普勒中心偏移计算方法的研究尚比较少,只有Hansen等人[16]利用Envisat ASAR探测数据计算了多普勒中心偏移,并对处理误差进行分析。本文针对机载正侧视SAR提出一种多普勒中心偏移计算方法,并开展机载SAR探测比对观测实验,结合C波段多普勒频移(C-band Doppler Shift,CDOP)地球物理模型函数验证反演方法的有效性。
2 多普勒中心偏移
2.1 平台运动状态与多普勒中心频率
正侧视SAR(天线指向与搭载平台航向垂直)探测目标时,平台运动状态受气象要素影响会发生变化,导致雷达天线指向产生偏离,此时平台航向和天线指向构成的探测几何关系如图1所示。其中,实箭头方向为搭载平台飞行航向,两条虚直线间区域为SAR探测覆盖区域。当平台运动状态处于理想稳定状态时,天线指向用矢量表示,实线椭圆表示理想天线波束覆盖区域,而平台运动状态变化时,天线指向用矢量表示,虚线椭圆表示实际天线波束覆盖区域。雷达天线实际指向与理想指向的夹角称为雷达斜视角,由俯仰角和偏航角等姿态参数决定。其中,俯仰角为搭载平台实际航向与设计航向沿竖直方向的夹角,偏航角为搭载平台实际航向与设计航向沿水平方向的夹角。
多普勒中心频率指探测目标通过SAR天线波束中心时刻(波束侧视角为0),回波的多普勒频率。平台运动状态变化时,多普勒中心频率与雷达斜视角的对应关系为
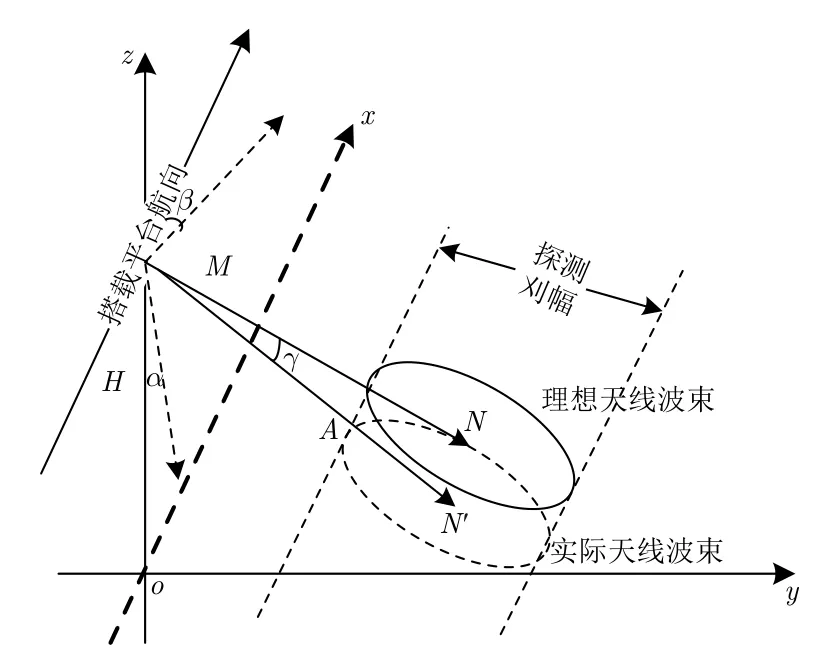
图1 搭载平台航向和天线指向构成的探测几何关系Fig.1 Sounding geometric relationship between the platform and antenna pointing heading

多普勒中心频率表示SAR天线波束中心指向与探测目标之间相对径向运动。由式(1)可知,平台运动状态变化对应的多普勒中心频率,不包含探测目标运动的影响。SAR海洋环境探测时,多普勒中心频率的影响因素既包括平台运动状态变化,又包括海洋表层运动,而后者的影响包含在SAR探测回波之中。
2.2 海洋探测回波与多普勒中心频率
SAR探测回波数据是发射天线覆盖区域多个散射单元回波信号的矢量和,同时包含目标的幅度和相位信息。每个散射单元回波在方位向上都是一个线性调频信号,中心频率被天线方向图调制。从文献[17]可知,SAR信号的方位向功率谱可表示为

由式(2)可知,目标场景均匀条件下SAR探测回波的多普勒功率谱与天线方向图具有相同的形状。由于天线方向图函数为实对称函数,且频谱中心在峰值处,所以多普勒中心频率等于多普勒功率谱能量中心对应的多普勒频率。
2.3 多普勒中心偏移计算
平台运动状态对应的多普勒中心频率仅包含搭载平台运动和地球自转(星载SAR)的影响,而海洋探测回波确定的多普勒中心频率同时包含搭载平台运动状态和海洋表层运动的贡献。因此,海洋表层运动是SAR平台运动状态数据和海洋探测回波数据计算多普勒中心频率存在差异的关键因素。
Chapron等人[7]定义多普勒中心偏移表示海洋表层运动引起的多普勒中心频率变化。多普勒中心偏移数值上等于SAR海洋探测回波数据计算的多普勒中心频率减去搭载平台运动状态数据计算的多普勒中心频率所得差值,可表示为

式中,fdcs表示多普勒中心偏移,表示海洋探测回波获取的多普勒中心频率,表示搭载平台运动状态计算的多普勒中心频率。
对于动态海面,多普勒中心偏移由表面散射元的距离向空间平均速度和局地雷达后向散射系数决定,可表示为[7,18]

3 机载SAR多普勒中心偏移计算方法设计
3.1 载机运动状态数据计算多普勒中心频率
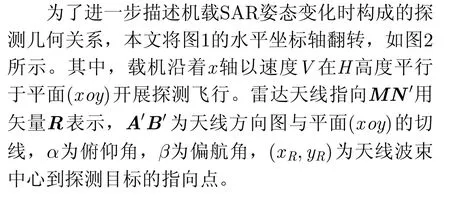
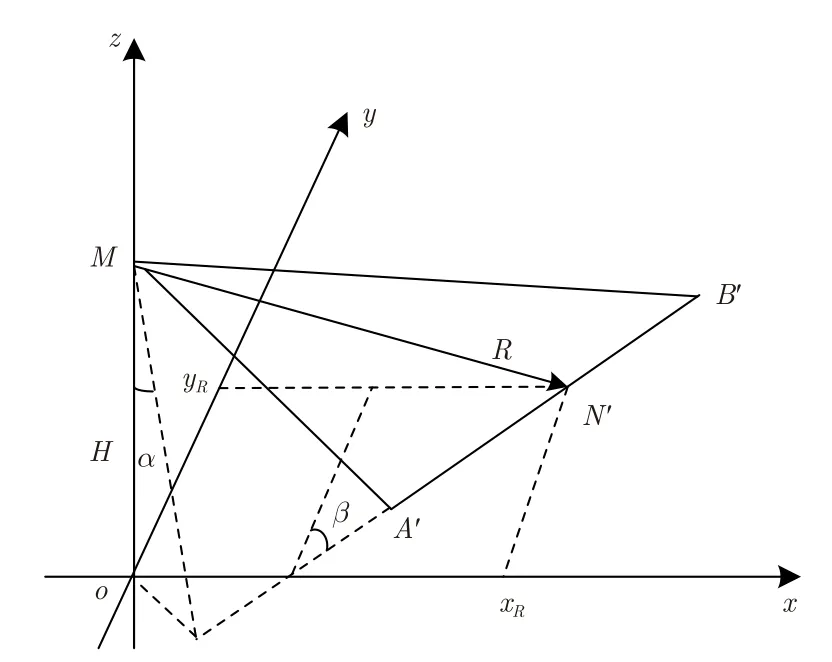
图2 机载SAR姿态变化时构成的探测几何关系Fig.2 Sounding geometric relationship in airborne SAR posture change
此时,天线波束中心到地面指向点的坐标为[10]
由式(5)和式(7)可知,决定多普勒中心频率的载机姿态参数包括俯仰角、偏航角、飞行速度和探测斜距。
俯仰角、偏航角、飞行速度和探测斜距等载机姿态信息,由惯性导航系统(Inertial Navigation System,INS)提供。惯性导航系统为光纤陀螺组合导航系统,输出参数包括俯仰角、偏航角、飞行高度和速度等。
利用载机运动状态数据计算多普勒中心频率的具体步骤为:首先,从惯性导航数据直接读取俯仰角和偏航角信息;然后,结合卫星定位信息获取飞行高度和速度,再利用飞行高度和雷达入射角计算探测斜距;最后,将俯仰角、偏航角、飞行速度和探测斜距输入式(5)和式(7),计算多普勒中心频率
3.2 海洋探测回波数据计算多普勒中心频率
通过分析探测回波的多普勒功率谱确定多普勒中心频率的方法,称为多普勒谱分析法[5,19]。当有些不完全孔径点的探测回波明显大于海面目标场景的其它部分时,会导致多普勒功率谱的形状产生畸变,影响多普勒中心频率的计算精度。特别是多普勒功率谱峰值附近比较平坦,使得噪声干扰更容易产生计算误差。因此,通过技术手段去除噪声对多普勒功率谱的影响,是提高多普勒中心频率计算精度的重要途径。
本文利用小波分析去除噪声对多普勒功率谱的影响。在SAR数据处理中,本文发现Mexican-Hat母小波函数具有任意阶的正则性,同时具有较好的时域和频域局部化特性及信号能量集中特性,有利于去除噪声对多普勒功率谱的影响。
Mexican-Hat小波函数为高斯函数的2阶导数,可表示为[20]

利用探测回波数据计算多普勒中心频率的具体步骤为:首先,从全极化回波数据中读取VV极化数据;然后,进行方位向FFT,并将FFT后的探测回波沿方位向叠加,得到多普勒功率谱;接着,利用Mexican-Hat小波函数去除噪声干扰;最后,确定多普勒功率谱能量中心对应的多普勒频率为多普勒中心频率
3.3 影响因素分析
多普勒中心偏移计算精度取决于载机运动状态数据精度和探测回波数据精度两个方面。在实际反演应用中,一方面需要从平台数据获取高精度的多普勒中心频率信息,这需要高稳定性的平台以及高精度的平台运动状态数据,包括俯仰角、偏航角、飞行速度和探测斜距等参数及其测量精度信息。
本文取俯仰角为0°,偏航角为2.5°,飞行速度为45 m/s,飞行高度为3 km,雷达入射角40°,采用敏感性分析的方法考察运动状态测量精度对于多普勒中心频率计算精度的影响。假设一个参数存在测量误差,其它参数测量准确的情况下,惯导参数测量误差对多普勒中心计算精度的影响如表1所示。
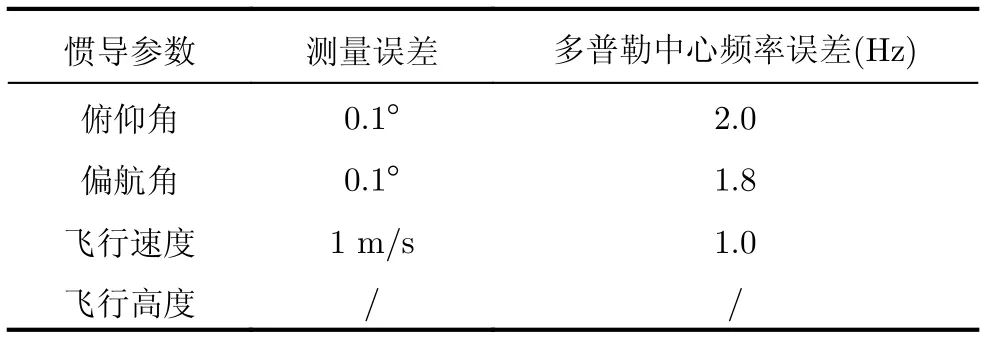
表1 惯导参数测量误差对多普勒中心频率计算精度的影响Tab.1 The influence of inertial parameter measurement error to Doppler center frequency calculation accuracy
由表1可知,偏航角和俯仰角的测量精度对多普勒中心频率计算影响显著,0.1°的测角误差会带来2 Hz的频率测量误差。飞行速度的测量精度对多普勒中心频率计算影响较小,1 m/s的测速误差会带来1 Hz左右的频率测量误差。而飞行高度误差对于多普勒中心频率测量精度没有影响。因此,要满足海洋环境应用需求,惯导的角度测量精度是影响多普勒中心频率计算精度关键因素。
近些年我国机载、星载平台以及惯导技术的发展,能够提供高精度的平台运动状态参数,使得多普勒中心偏移的应用成为可能。另一方面,还需要从探测回波数据中获取高精度的多普勒中心频率信息,其精度受到信噪比和数据处理方法的影响。
仿真和试验结果均表明[21]:提高信噪比有利于提高多普勒中心频率的计算精度,但信噪比大于10 dB后,通过信噪比改善多普勒中心频率精度的效果将会大大降低。在应用中可以根据这一特点选择合适的信噪比。
4 实验验证研究
4.1 实验数据
机载正侧视SAR的飞行探测时间为2012年7月26日14~21时,载机飞行高度为3 km,探测分辨率为1.5 m, 3 m,雷达中心入射角为30°, 40°。飞行探测试验获取的数据包括全极化SAR原始回波数据和搭载平台的惯性导航数据。机载SAR工作参数包括工作模式、极化方式和PRF等,指标如表2所示。
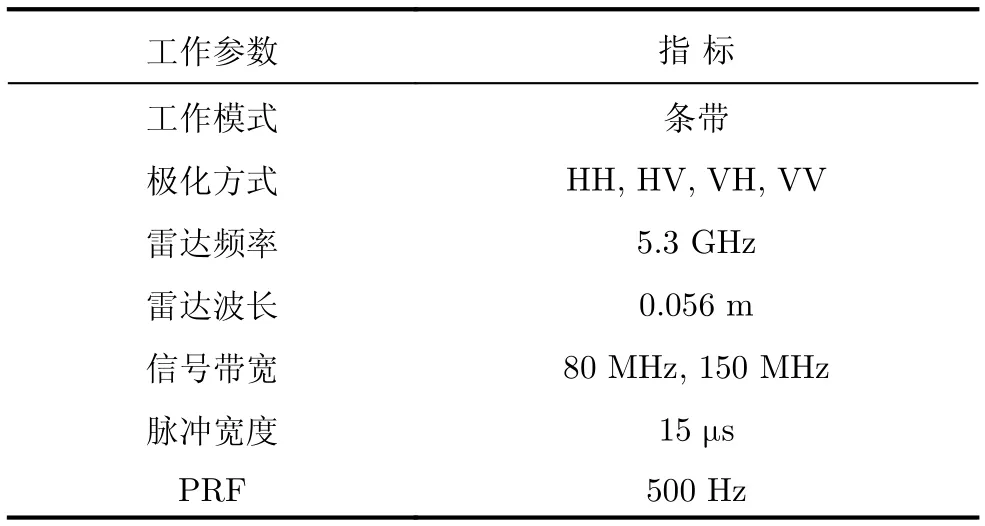
表2 机载SAR工作参数及指标Tab.2 Operating parameters and indicators of airborne SAR
机载SAR的探测回波为全极化数据,本文采用VV极化回波数据计算多普勒中心频率。
惯性导航系统输出俯仰角、横滚角、偏航角等角度信息,以及飞行速度和高度信息,角度测量精度优于0.05°,速度测量信息优于0.1 m/s。
比对观测数据由实验海域的国家气象局“58573号”浮标观测提供。浮标位于舟山海域29.75°N, 122.75°E附近,提供海面10 m风向、风速,海浪的波向、有效波高和有效波周期等海洋环境要素,观测时间间隔为10 min。为了保证探测数据时空匹配的有效性,本文通过航向设计使得机载SAR在浮标周围50 km×50 km海域获取探测数据。
4.2 CDOP地球物理模型函数
Mouche等人[6]统计发现无明显中尺度海洋现象条件下(海面风场主导),风向和风速两个地球物理参数是影响多普勒中心偏移主要因素。通过对ENVISAT ASAR获取的多普勒中心偏移与ASCAT散射计反演的风场数据进行系统分析,提出了CDOP地球物理模型函数,一般表达式为

虽然CDOP模型函数仅包含风向和风速两个地球物理参数,但其刻画的多普勒中心偏移与海洋表层运动的地球物理关系,包含了倾斜调制、流体力学调制、自然散射机制和Bragg散射等海洋表层地球物理特性,与理论模型相比具有更为显著的代表性。因此,本文将浮标实测海面风场数据输入CDOP地球物理模型函数,仿真计算多普勒中心偏移作为比对验证真值,验证计算方法的有效性。
4.3 验证方案
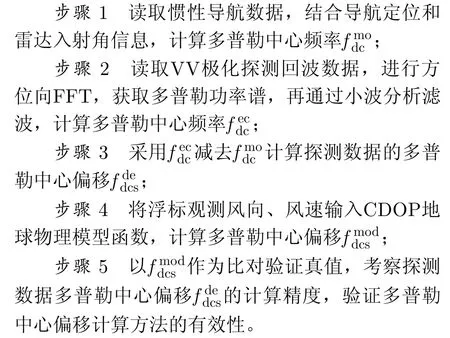
机载正侧视SAR多普勒中心偏移计算方法的实验验证方案如图3所示。一方面,本文利用机载正侧视SAR开展飞行探测试验,获取多普勒中心偏移数据;另一方面将实验海域的浮标风向、风速输入CDOP地球物理模型函数,仿真计算多普勒中心偏移。最终,将CDOP地球物理模型函数的计算结果作为比对验证真值,验证计算方法的有效性,具体步骤为
4.4 实例计算
本文以机载SAR探测数据20120726-011为例,研究多普勒中心偏移计算方法的精度,步骤如下:
步骤 1 利用惯性导航数据计算多普勒中心频率。探测数据20120726-011采用的雷达入射角为40°,俯仰角、偏航角、飞行速度和高度等姿态信息,如图4所示。
从图4可知,由于高空风影响,载机姿态会在一个固定状态附近产生微小变化。本文通过载机姿态信息的平均处理去除姿态微小变化的影响,再将俯仰角、偏航角、飞行速度、高度以及雷达入射角输入式(8),计算多普勒中心频率
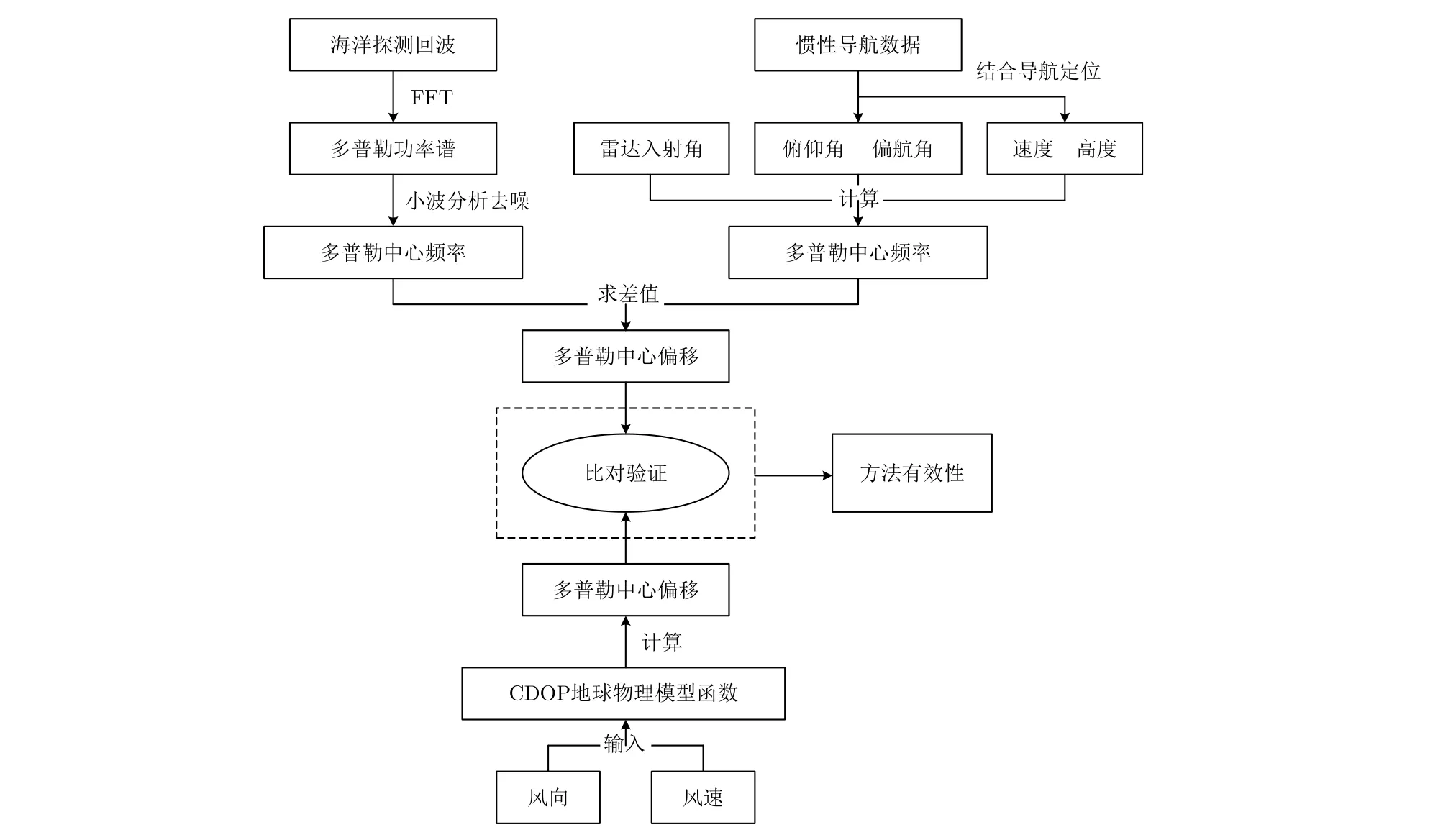
图3 多普勒中心偏移计算方法验证方案Fig.3 Doppler centroid shift calculation method verification scheme
步骤 2 利用探测回波数据计算多普勒中心频率。读取机载SAR探测回波数据,一个脉冲序列的全极化回波数据排列如图5(a)所示,图中幅度显著变化部分为回波信号,极化方式依次为HH, HV,VH和VV,其余部分为噪声。从中读取VV极化回波数据(图5(b), 512×512),作方位向FFT,所得图像如图5(c)所示,图中明亮部分为天线方向图中心指向区域。将FFT后的探测回波沿方位向叠加,得到多普勒功率谱(图5(d),蓝色曲线)。如果直接从图5(d)蓝色曲线确定多普勒中心频率,受噪声影响将会在59~64 Hz范围内出现局部最优解,产生±2.5 Hz的计算误差。
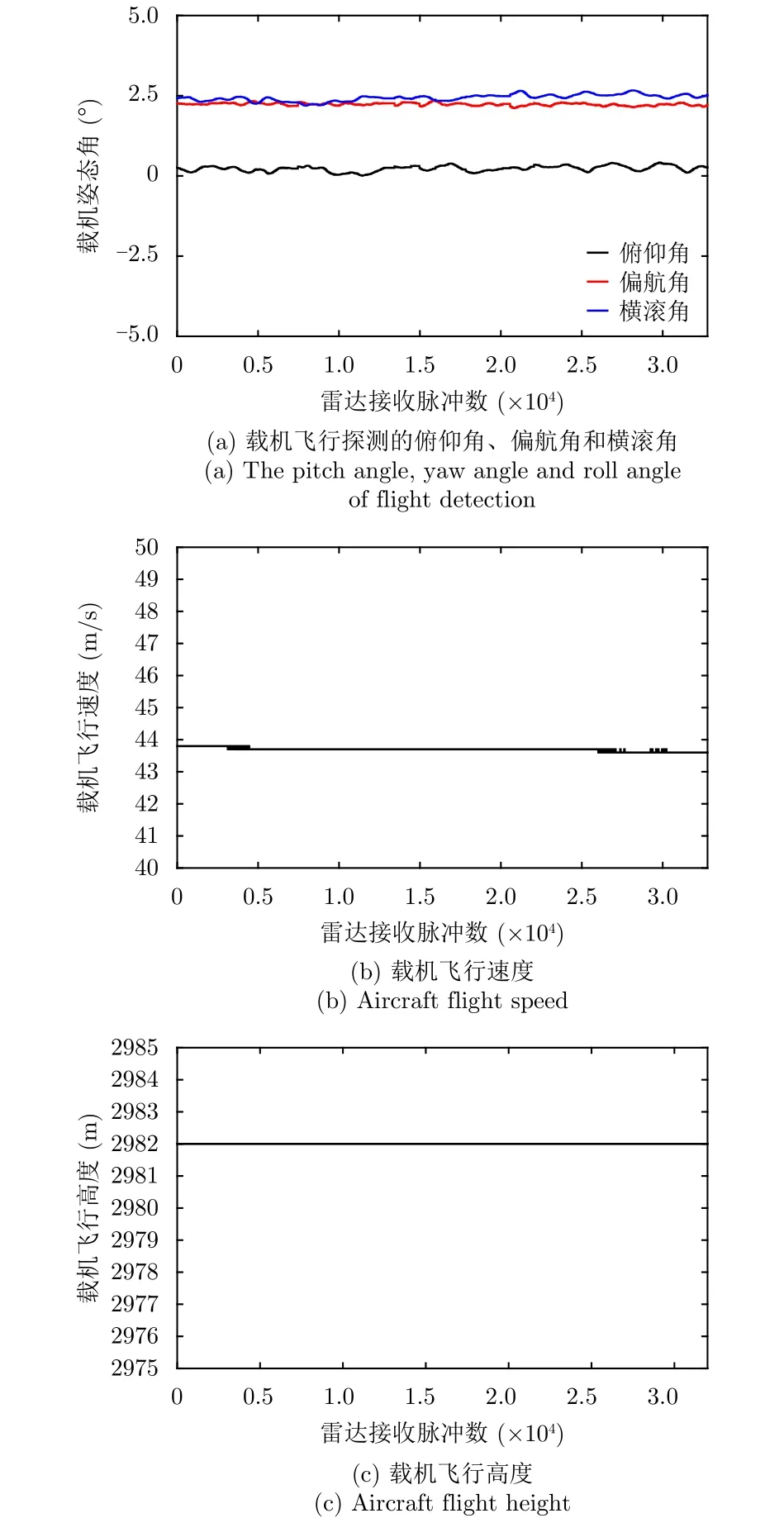
图4 探测数据20120726-011的姿态信息Fig.4 Attitude information of the probe data 20120726-011
利用Mexican-Hat小波函数滤波,平滑多普勒功率谱(图5(d),红色曲线),最终依据多普勒功率谱能量中心位置确定多普勒中心频率
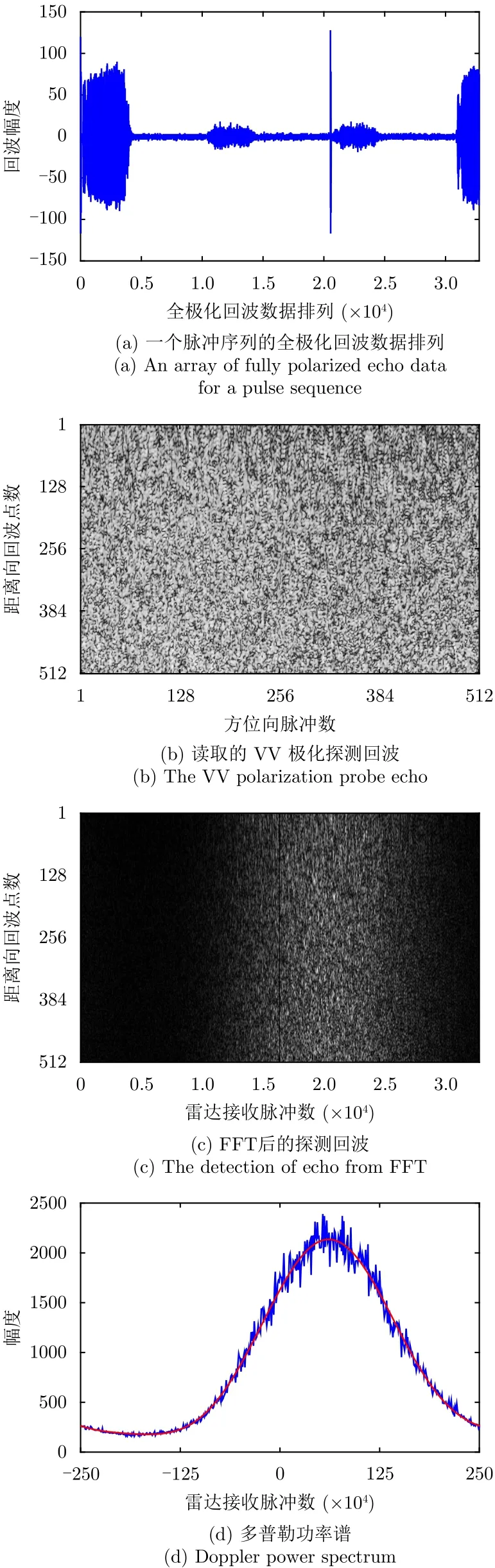
图5 机载SAR探测回波数据计算多普勒中心频率Fig.5 The Doppler center frequency calculate from Airborne SAR detection echo data
步骤 4 采用CDOP地球物理模型函数计算多普勒中心偏移。探测数据20120726-011的雷达入射角为40°,天线波束中心指向为180°。与其匹配的浮标风速为5.3 m/s,风向为136°,则风向与天线波束中心指向的夹角为–44°。将雷达入射角、风速和风向与天线波束中心指向的夹角输入CDOP地球物理模型函数,计算多普勒中心偏移结果为14.5 Hz。
4.5 可行性分析
按照4.3节计算过程,本文计算7月26日9组探测数据的多普勒中心偏移,并以CDOP地球物理模型函数计算结果作为比对验证真值,计算结果如表3所示。
由表3可知,9组探测数据多普勒中心偏移计算误差的绝对值均小于2 Hz,均方根误差为1.4 Hz。
基于CDOP经验模型,本文取风向45°,雷达入射角取30°,研究多普勒中心偏移计算误差与风速误差关系。在中、低风速条件下,多普勒中心偏移计算误差与风速误差的对应关系如图6所示。
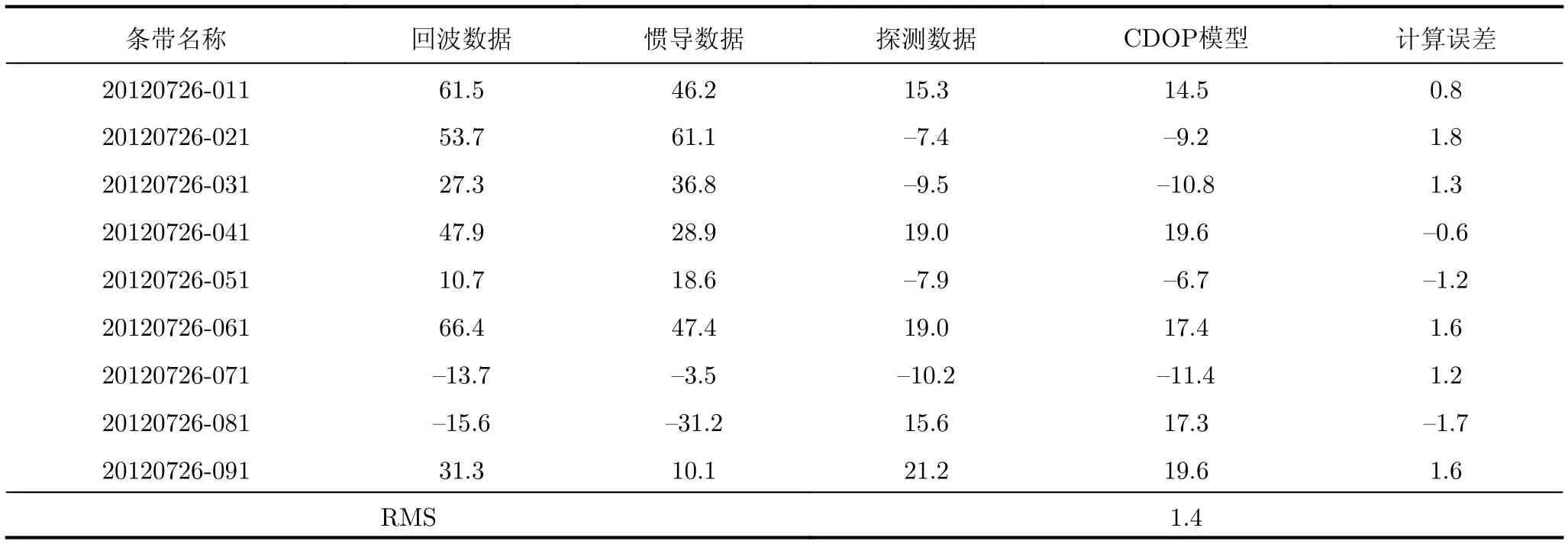
表3 多普勒中心偏移计算结果比对验证(Hz)Tab.3 Comparison of Doppler centroid shift calculation verification (Hz)
图6中,风速误差随着多普勒中心偏移计算误差的增加而增加,1 Hz的多普勒中心偏移计算误差会带来约1 m/s的风速误差。海洋环境应用中要求风速反演误差小于2 m/s,此时多普勒中心偏移计算误差应小于2.2 Hz。考虑设计冗余,论文中要求多普勒中心偏移计算误差应小于2 Hz。比对验证结果表明,本文提出的多普勒中心偏移计算方法有效,可满足海洋环境要素反演精度要求。
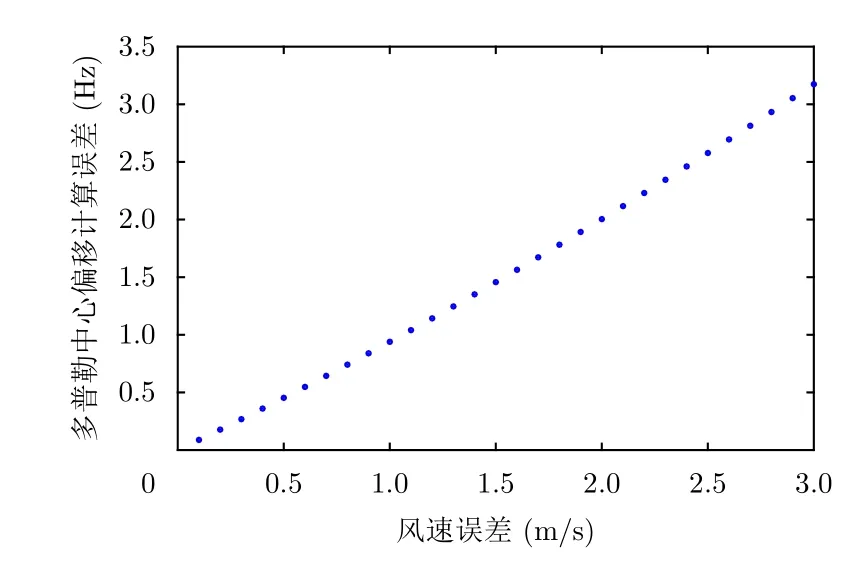
图6 多普勒中心偏移计算误差与风速误差对应关系Fig.6 Correspondence between Doppler centroid shift calculation error and wind speed error
实际应用中,可以基于不同平台(机载、星载)运动状态数据,针对性选用计算方法获取多普勒中心频率,同时基于探测回波数据,选用相应分析方法求解多普勒中心频率。
7月26日14时到21时的浮标观测结果表明,探测海域风向变化范围为130°~150°,风速为5.2~6.5 m/s。若仅考虑风向、风速变化,多普勒中心偏移的变化范围应小于3 Hz。而表3中机载SAR探测数据多普勒中心偏移计算结果为–10.2~21.2 Hz,变化范围为31.4 Hz。这是因为多普勒中心偏移取决于天线波束中心指向与风向的夹角,而非单纯风向。探测试验时,为了保证浮标比对数据时空匹配的有效性,本文设计载机作三角航线飞行。由于载机航向调整,使得天线波束中心指向与风向的夹角发生变化,影响了天线波束中心指向与探测目标之间相对径向运动,导致多普勒中心偏移变化范围变大。由此可见,载机飞行航向直接影响多普勒中心偏移计算结果。因此,机载SAR海洋环境探测时,设计载机作直线飞行,有利于开展海洋环境要素反演研究。
5 结束语
针对机载正侧视SAR,本文提出了一种多普勒中心偏移计算方法,分别利用载机运动状态数据和海洋探测回波数据计算多普勒中心频率,再作差求解多普勒中心偏移。在多普勒谱分析法中加入小波分析去除噪声对多普勒功率谱的影响,提高了海洋探测回波数据计算多普勒中心频率的精度。
利用机载SAR开展了飞行探测实验,获取多普勒中心偏移,同时将实验海域的浮标风向、风速输入CDOP地球物理模型函数仿真计算多普勒中心偏移作为比对验证真值。实验结果表明,9组探测数据多普勒中心偏移计算误差的绝对值均小于2 Hz,均方根误差为1.4 Hz,多普勒中心偏移计算方法有效,可满足海洋环境要素反演的精度要求。多普勒中心偏移变化范围较大的原因是载机航向调整,使得天线波束中心指向与风向的夹角发生变化,影响了天线波束中心指向与探测目标之间相对径向运动。因此,机载SAR海洋环境探测时,设计载机作直线飞行,有利于开展海洋环境要素反演研究。
本文研究结果可为机载、星载SAR多普勒中心偏移的海洋环境应用提供技术支持。多普勒中心偏移的计算精度是其应用于海洋环境探测的一个关键因素,取决于平台运动状态数据精度和探测回波数据精度两个方面。未来工作中,将系统分析平台运动状态参数测量误差,以及多普勒功率谱的噪声干扰误差,构建误差传递函数,再通过误差系统校正,提高多普勒中心偏移计算精度。
