无人机低空倾斜摄影测量在地籍测量中的应用
2019-07-05何淼
何淼
(珠海市测绘院,广东 珠海 519000)
1 前 言
目前很多地方开展了农村地籍调查的工作,外业测量及调查工作是重要的一环,传统的作业方法[1~3]需要大量的外业测绘人员深入现场长时间操作,其成本高、工作强度大、操作工序复杂、且耗费工时,亟须新的作业方法和更先进的测绘技术来提高作业效率和减少外业测量的工作。近期快速发展的无人机低空摄影测量技术可针对性解决该问题[4~11]。珠海市测绘院承接了较多农村地籍调查项目,为把握技术前沿,已在近期几个项目中采用了无人机低空倾斜摄影测量技术,并取得较好的实际应用效果,对比传统调查方式手段效率大大提高。
2 传统农村地籍调查的方法
解析法和图解法是目前农村地籍调查的主要方法。简而言之,解析法就是先数字化测图后再调查,图解法则是在正射影像图作为底图的基础上展开调查。两种方法各有优缺,解析法较图解法精度高,但是工期较长,图解法精度较低,但工作时间短。方法的选择需结合实际作业地区的情况,发达地区和中心城区一般使用精度更高的解析法,图解法因其操作简单,适合应用于边远山区。
2.1 解析法
以满足农村集体土地确权登记发证工作为出发点,充分利用已有地籍调查成果和登记成果,开展宅基地、集体建设用地和零星国有建设用地土地权属调查、农房调查和地籍测量,总体技术路线图如图1所示。

图1 解析法农村地籍调查流程图
2.2 图解法
以高分影像成果为主要数据源,充分利用已有土地调查、登记和户籍等资料,通过室内采集与调查、外业调查与边长丈量、内业整理与建库,多快好省地完成农村地籍调查工作。技术路线图如图2所示。
从以上两种方法的技术路线不难看出,解析法对实施单位要求更高,解析法要求实地用GPS、全站仪数学化测完图,形成工作底图后才能开展调查,因此需要投入大量的测绘专业技术人员为了提高效率,本单位在A地区和B地区尝试使用无人机低空摄影测量方法进行地籍测量工作,以期降低外业的人员投入和工作效率,突破传统地籍调查技术瓶颈。

图2 图解法农村地籍调查流程图
3 无人机低空倾斜摄影地籍测量
倾斜摄影技术是测绘领域近些年发展起来的一项高新技术,打破了以往正射影像只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从1个垂直、4个倾斜等5个不同的角度采集影像,将用户引入了符合人眼视觉的真实直观世界。倾斜摄影测量技术以大范围、高精度、高清晰的方式全面感知复杂场景,通过高效的数据采集设备及专业的数据处理流程生成的数据成果直观反映地物的外观、位置、高度等属性,为真实效果和测绘级精度提供保证。同时有效提升模型的生产效率,采用人工建模方式一两年才能完成的一个中小城市建模工作,通过倾斜摄影建模方式只需要3~5个月时间即可完成,大大降低了三维模型数据采集的经济代价和时间代价。
以珠海市测绘院承接的农村地籍调查项目为例,A地区地籍项目需要测量的村庄 1∶500地籍图面积约为 15 km2,B地区需要测量的村庄 1∶1 000地籍图面积约为 30 km2,A地区的航拍影像需要优于 2 cm分辨率的倾斜摄影,B地区航拍影像需要优于 5 cm分辨率的倾斜摄影,并利用倾斜摄影数据利用Smart3D等软件进行实景三维自动建模,然后再用清华山维软件勾画地形图。
3.1 无人机倾斜摄影地籍测量工作流程
如图3所示,本次实景三维建模的生产制作流程包括:
(1)现场勘察与资料收集:对2个区域进行现场勘测,寻找合适的起飞地点,对测区现场的限飞情况与相关部门进行了解沟通,收集天气气象资料,制定合理的飞行时间。
(2)技术设计:选择合适的飞行器,制定飞行路线、区域,选择适合的飞行时间,对航线重叠度、航次等重要参数进行设计论证,制定合理可行的实施方案和安全方案。
(3)倾斜三维摄影采集:按照技术设计现场进行航测飞行数据采集工作。
(4)实景三维建模处理:利用Smart3D、Altizure等专业软件对倾斜摄影采集的数据进行处理,自动生成实景三维模型。
(5)利用清华山维或者南方idata等软件在三维模型上勾画地形图。
(6)内业质检、外业查漏补缺。

图3 工作流程
3.2 无人机倾斜摄影技术硬件简介
无人机摄影设备、无人机倾斜摄影系统分别如图4、图5所示。

图4 无人机摄影设备
(1)倾斜相机:它通常情况采用5个方位进行数据采集,分为正摄、前视、后视、左视、右视。

图5 无人机倾斜摄影系统
(2)飞行器:
无人机倾斜摄影主要以固定翼、旋翼为主流。
①固定翼:一般以电动、油动为主要动力源,优点:续航时间长、效率高。不足:由于固定翼航速较快配合的相机曝光间隔时间要求高,其次由于有安全航高的限制、载重的限制通常能够获取的影像地面分辨率在 8 cm以上。面对测绘行业对精度要求不断提高,受众面变窄。
②旋翼机:一般有三、四、六、八旋翼。
优点:可悬停、易操作、安全性高,可以根据测区情况进行不同高度的飞行作业,使获取的影像地面分辨率达到 1 cm以下。现阶段采用八轴飞机为主流,其原因是八轴飞机可以支持断桨保护,在失去一个机臂时可正常飞行,在失去不相邻的两个机臂时仍然可以安全回收。在飞控的选择上作为航测用途的多选择双控制器,原因是无人机倾斜摄影在市区作业较多,安全的保障是第一位的。不足:续航时间有限,一般的无人机倾斜摄影相机重量在 2 kg~5 kg,续航在 30 min左右。
本项目使用的是对电池改装容量加大了的旋翼机。
3.3 无人机倾斜摄影测量数据采集
制定计划后,在天气条件合适的情况下,组织人员设备进行了外业无人机倾斜摄影采集,根据现场条件不同,飞行高度在 100 m~200 m之间,航线设计符合相关技术要求,倾斜摄影的航线设计采用专用航线设计软件进行设计,其相对航高、地面分辨率及物理像元尺寸满足三角比例关系。本次要生产自动化模型,旁向重叠度需要达66%以上,航向重叠度也需要达到66%以上。航线设计软件生成一个飞行计划文件,该文件包含飞机的航线坐标及各个相机的曝光点坐标位置。实际飞行中,各个相机根据对应的曝光点坐标自动进行曝光拍摄。
3.4 内业数据三维建模
数据获取完成后,首先要对获取的影像进行质量检查,对不合格的区域进行补飞,直到获取的影像质量满足要求,其次进行匀光匀色处理,在飞行过程中存在时间和空间上的差异,影像之间会存在色偏,这就需要进行匀光匀色处理,再次进行几何校正、同名点匹配、区域网联合平差,最后将平差后的数据(3个坐标信息及3个方向角信息)赋予每张倾斜影像,使得它们具有在虚拟三维空间中的位置和姿态数据,至此倾斜影像即可进行实时量测,每张斜片上的每个像素对应真实的地理坐标位置。内业处理采用Smart 3D作为数据处理软件,Smart 3D能够以一组对静态建模主体从不同的角度拍摄的数码照片作为输入数据源,加入各种可选的额外辅助数据:摄像头的属性(焦距、传感器尺寸、主点、镜头失真),照片的位置(如GPS),旋转照片(如INS),控制点等信息,无须人工干预,即能输出高分辨率的带有真实纹理的三角网格模型,生成输出的三维网格模型能够准确精细地表现出建模主体的真实色泽、几何形态及细节构成,从而完成倾斜摄影数据到三维模型的过程。图像到三维模型建立流程如图6所示。
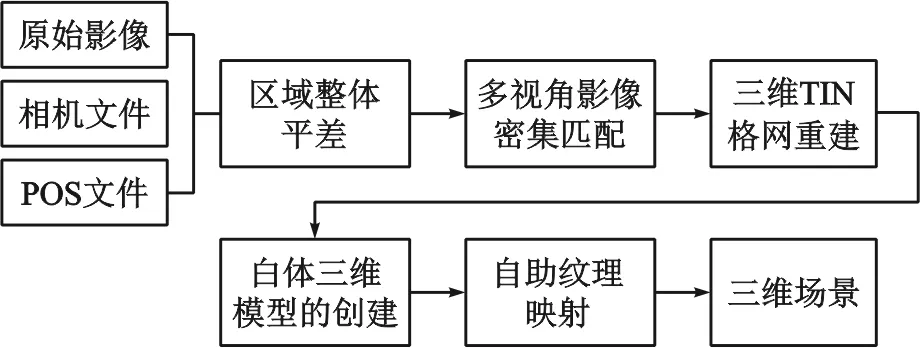
图6 图像到三维模型建立流程
4 总 结
两人一组的外业测量小组采用常规的测量方法,每个月的作业量在 0.2 km2左右,若使用无人机低空倾斜摄影测量技术,一个外业组一天的航拍面积就可达 5 km2,外业效率提高了数百倍。将无人机低空倾斜摄影测量技术应用于实际地籍测量项目中取得了极好的效果,该方法大大提高了工作人员的外业效率,有广阔的应用推广前景。
