空间红外遥感器定标机构故障应急退出装置
2019-07-05贾慧丽于婷婷
贾慧丽,赵 鑫,于婷婷
(1.北京空间机电研究所,北京 100094;2.北华航天工业学院 机电工程学院,河北 廊坊 065000)
0 引言
卫星或航天器搭载的定标机构的工作原理是通过驱动机构带动漫反射板,使得太阳光反射进入光路,进而实现可见光和近红外短波红外谱段的谱段标定[1-2]。在轨进行定标过程中,电机或控制电路故障会造成漫反射板无法正常转回初始位置,进而遮挡成像光路,最终导致整个成像系统失效。因此,在工程实现上,需要设计应急退出装置,避免定标机构故障情况下相机成像系统失效。
传统的星载定标机构中的锁定与解锁复位结构包括机械锁和电磁铁装置。机械锁通过步进电机驱动凸轮转动。凸轮推动一端带有顶尖的伸缩杆。凸轮在高点时,顶尖与活动部件接触以实现锁定;凸轮在低点时,顶尖与活动部件分离以实现解锁。锁定和解锁过程均需给电机通电。电磁吸合装置通过加电时产生的磁力将活动部件上的铁块吸住以实现锁定,两者不直接接触,之间存在一定间隙,断电后磁力消失以实现解锁。机械锁和电磁铁装置体积较大、质量较重,需要使用电机、电磁铁等驱动设备,可靠性受到影响。
记忆合金由于其特殊的形状记忆功能,常被用于驱动器中[3]。目前,国内外已利用记忆合金驱动力大的特点设计了多种锁定与解锁机构[4-10]。但由于受空间和记忆合金收缩率的限制,驱动的位移量有限,记忆合金在机构齿轮副分离方面的应用未见报道。
本文结合我国某型号遥感器定标机构的故障应急需求,设计了一种基于记忆合金的退出装置。研制产品通过了环境试验,其功能和性能得到了充分验证。该装置具有很大的工程应用潜力,为航天器机构的故障应急提供了一种新方式。
1 方案设计
应急退出装置主要由记忆合金组件和卷簧组件2部分构成,如图1所示。记忆合金组件由记忆合金棒、加热棒、杠杆、齿轮拖出夹和支撑座构成,用于驱动齿轮退出啮合系统;卷簧组件由卷簧轴和卷簧组成,用于带动负载复位。
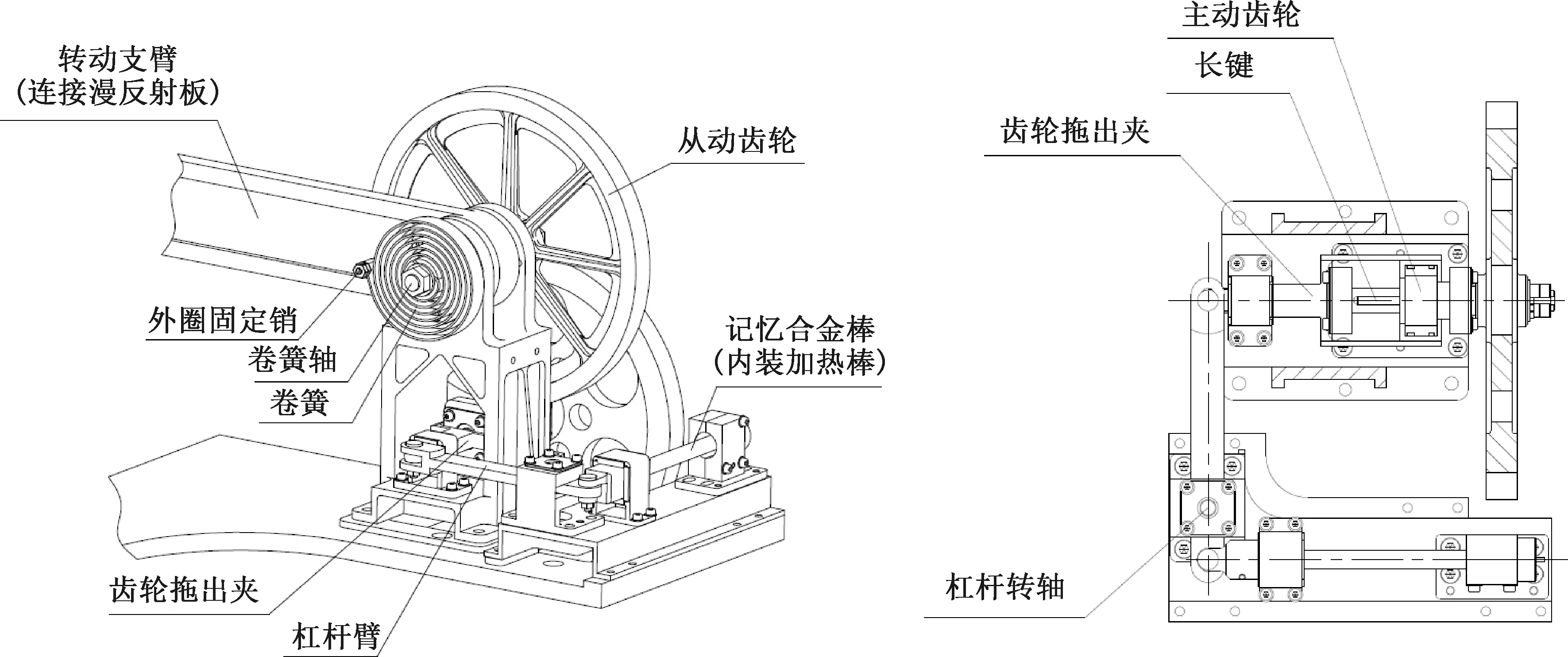
图1 应急退出装置结构Fig.1 Structure of emergency exit device
1.1 结构设计
为使退出装置在有限空间内实现齿轮拖出和机构复位的功能,保证退出的可靠性,在结构设计中采取以下措施:
1) 将记忆合金棒设计为中空,在内部封装加热棒,作为驱动源。为保证记忆合金棒受热后收缩顺畅,在支撑座内孔四周安装聚酰亚胺薄片滑块,以减小运动时产生的摩擦力。
2) 为保证主动齿轮完全被拖出啮合系统,需要将记忆合金的收缩位移通过杠杆组件放大4倍。将记忆合金组件与齿轮拖出夹分别安装在杠杆转动臂的两端。在转动臂两端设计腰形孔,以保证转动行程,如图2所示。对转动臂做整体防冷焊处理。

图2 杠杆转动腰形孔设计原理图(mm)Fig.2 Design of lever waist hole(mm)
3) 为保证主动齿轮拖出自如,且满足强度要求,主动齿轮选用钛合金材料,表面溅射MoS2固体润滑防冷焊膜。主动齿轮与齿轮分离轴通过一长键连接,该长键既可用于力矩传递,又可作为齿轮拖出行程的导向。
4) 卷簧作为齿轮分离后的复位驱动源,在安装前需进行预紧。齿轮分离后,卷簧预紧力克服负载阻力矩,将漫反射板带回初始位,以避免遮挡光路。为防止卷簧圈间真空冷焊,在表面涂覆MoS2防冷焊涂层。
1.2 工作原理
在完成地面测试和卫星入轨后,红外光学遥感器在每次对地成像时都需要进行定标。此时,电机通过二级减速装置带动漫反射板绕转动轴旋转一定角度,到达定标位置。
当电机或控制电路出现故障,导致漫反射板遮挡光路,需要启动应急退出模式时,对加热棒通电一定时间。当加热棒温度升高到80 ℃以上时,通过热传导,记忆合金棒达到相变温度并恢复到记忆的原始形状。记忆合金棒在收缩过程中带动杠杆组件的杠杆臂旋转一定角度,从而带动齿轮拖出夹运动,使得主动齿轮沿键脱离出啮合状态,实现其与转轴连接的大齿轮脱离。
将卷簧轴心固定在支架上,调好卷簧的预紧力后,将卷簧外端尾部用销固定在漫反射板转动支臂上,如图3所示。随着漫反射板转动角度的增大,储存一定的转矩。当齿轮分离后,漫反射板在卷簧储蓄转矩的作用下,克服轴承摩擦力矩(真空下漫反射板的重力矩为0),绕转动轴返回初始位置,从而避免漫反射板遮挡光路,实现应急退出功能。
2 参数设计
根据在轨使用需求和地面试验需要,应急退出装置必须满足以下几点要求:
1) 加热棒的额定工作功耗为45 W,应使得记忆合金棒达到相变温度≥80 ℃。
2) 记忆合金的收缩量为5.0~5.5 mm,在杠杆放大作用下,满足主动齿轮的退出行程15 mm。
3) 卷簧储蓄的转矩作为负载力矩的一部分,应满足机构驱动力矩裕度的要求;此外,卷簧储蓄的转矩作为复位驱动源,应满足复位时克服轴承摩擦力矩的裕度要求。
针对上述3条技术要求,从加热棒、记忆合金-杠杆和卷簧3方面对机构重要参数进行设计。
2.1 加热棒设计
为保证加热棒的传导效率,将记忆合金棒设计为中空管状结构,内径为6 mm,外径为9 mm。将加热棒设计为杆状结构,外径为6 mm,总长为130 mm,采用双铠装工艺,在内部填充氧化镁导热绝缘材料。在加热棒与记忆合金棒间填充导热硅脂,一端用销钉连接固定,另一端无约束,以保证记忆合金的收缩性能,如图4所示。加热棒工作的稳定功耗为45 W,额定电压为28 V。
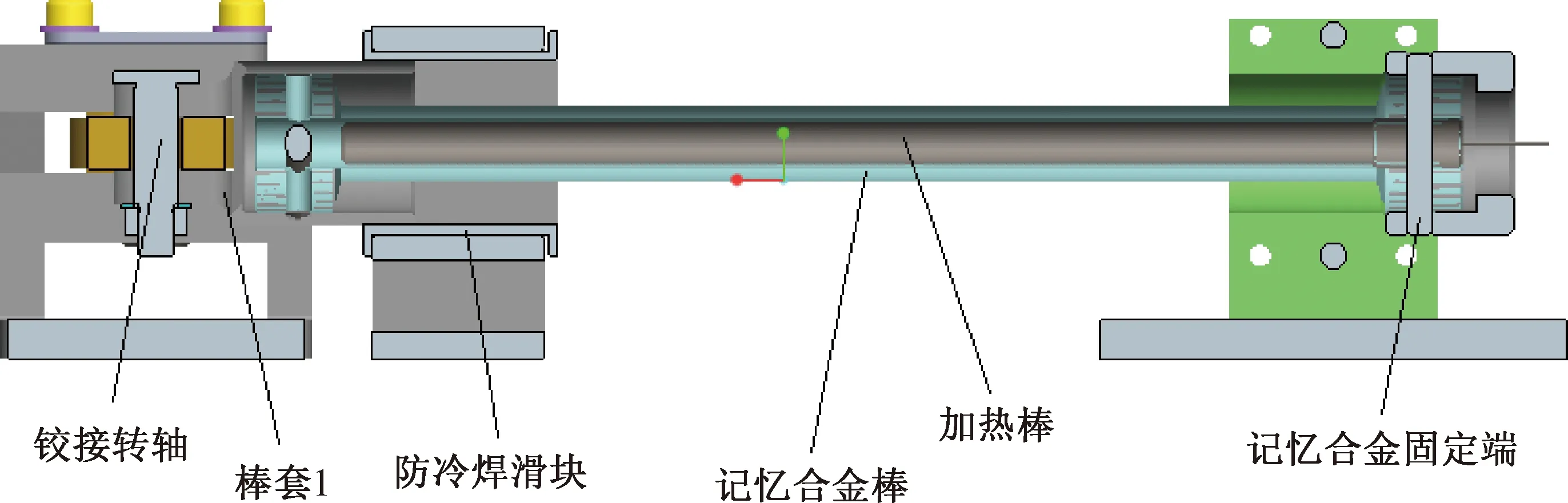
图4 加热棒和记忆合金棒设计Fig.4 Design of heating rod and memory alloy rod
2.2 记忆合金-杠杆设计
记忆合金棒由钛镍形状记忆合金制成,收缩位移量为δl。为保证完全拖出,需通过杠杆进行位移放大。设计杠杆的放大比例为α,齿轮的拖出位移量为lc,需满足
lc>δl·α
(1)
受空间限制,记忆合金棒有效伸长段为130 mm,可收缩的位移量为5.0~5.5 mm。主动齿轮的齿宽为15 mm。设计杠杆的放大比例为4∶1。因此,齿轮的拖出位移可达20~22 mm,满足拖出位移量要求,安全系数S1为1.30~1.47。
2.3 卷簧设计
在空间环境下,不考虑漫反射板的重力影响。卷簧驱动漫反射板复位时,仅需克服一对7002C角接触球轴承的摩擦力矩Mzc。另外,卷簧储蓄的转矩Tj还应满足电机驱动力矩裕度的要求,即满足
Tjmin≥Mzc
(2)
(3)
Tjmax=Tj0+Cθ
(4)
根据固体润滑轴承推荐预载,考虑安全系数,摩擦力矩Mzc≤40 mN·m。电机额定驱动转矩T电=700 mN·m。机构为两级传动,总减速比i=64,传动效率η按0.9计算。M1为折合到电机轴上的系统惯性力矩,M1=53.7 mN·m。M2为折合到电机轴上的轴承摩擦力矩,考虑受力和热变形影响,经计算,M2=25.1 mN·m。
根据式(2)~(4),计算得到卷簧提供转矩Tjmin≥40 mN·m,卷簧随漫反射板转动129°后,储存的转矩Tjmax≤5.04 N·m。
因此,卷簧设计使用带状QBe2.0材料,带宽为12 mm,厚为1.2 mm,圈数为6.375,圈间距离为4 mm,圈间接触面涂MoS2防冷焊润滑涂层[11]。设计卷簧刚度C=2.33 mN·m/(°),预紧角度θ0=214°,则卷簧的初始预紧力矩Tj0=498 mN·m,转动129°到位后的预紧力矩Tjmax=799 mN·m,电机驱动力矩裕度S2-1=5.9>3。参数设计满足负载力矩要求,且满足电机驱动力矩裕度的要求。
基于以上三方面的设计和分析,得到的应急退出装置的关键参数见表1。
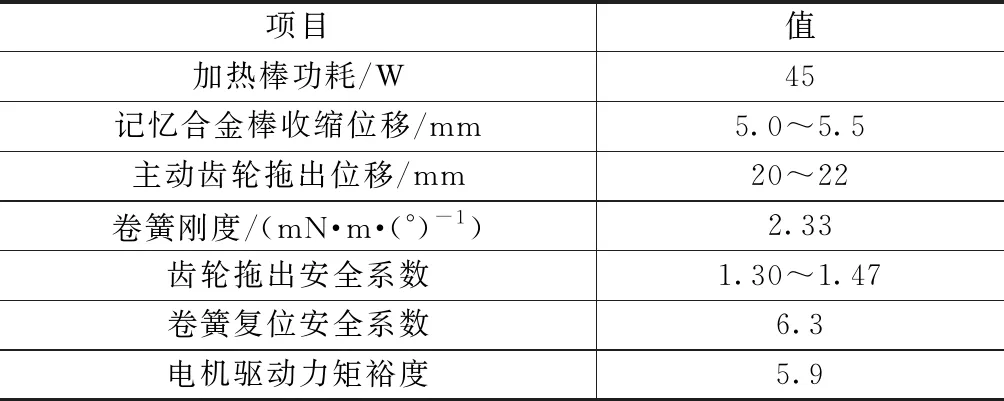
表1 应急退出装置参数表
3 性能试验
3.1 记忆合金收缩试验
记忆合金收缩试验用于验证记忆合金棒的收缩性能。记忆合金棒的收缩位移是应急退出装置实现功能的重要驱动源。验收时,将记忆合金棒同批次产品按照实际装配状态进行安装,并给加热棒通电,分别测试记忆合金的收缩量、加热时间和收缩时的温度,结果见表2,均满足设计要求。
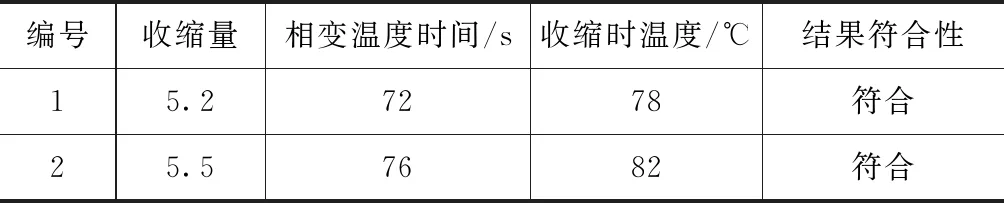
表2 记忆合金收缩性能测试结果
3.2 卷簧刚度测试
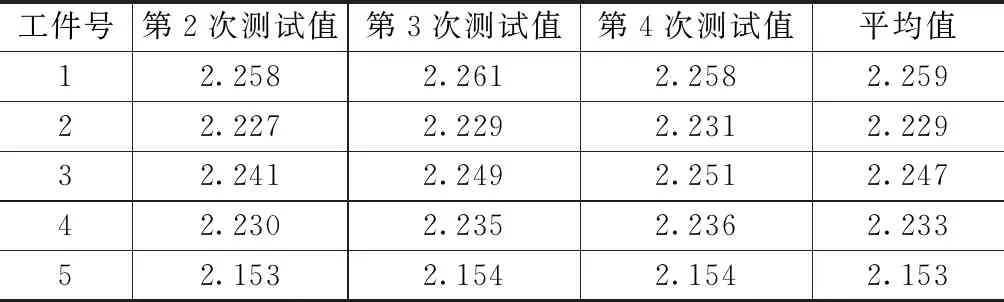
卷簧测试使用的仪器为YT-2铰链测试仪。传感器量程为3 N·m。角速度为9 (°)/s。测试时,将平面涡卷弹簧安装在测试工装上,与铰链测试仪接好,实测转角与扭矩间的关系。测试范围为0°~360°。得到卷簧的刚度曲线,如图5所示。要求同一卷簧测试刚度值C=(2.33±0.35) mN·m/(°)。连续测试4次,并按编号记录后3次的测量值,计算平均值,具体测试结果见表3。

图5 卷簧刚度曲线Fig.5 Coil spring stiffness curve
3.3 退出试验
验证退出功能时,先给电机和控制电路加电,使漫反射定标机构运转于定位状态,再启动应急退出模式,观察二级小齿轮在记忆合金组件收缩后被拉出啮合状态的情况,确认齿轮副是否脱离并记录时间,观察漫反射板组件在卷簧驱动下是否能返回初始位,并记录时间。试验结果见表4。经验证,应急退出功能均正常实现,状态稳定,满足设计要求。主动齿轮被拖出啮合状态后的位置如图6所示。
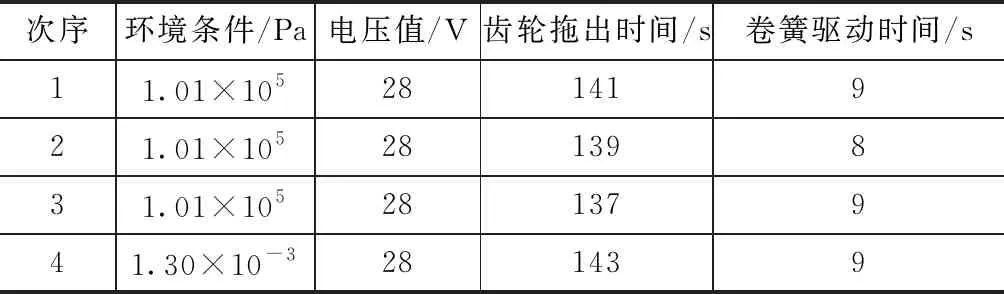
表4 应急退出功能验证
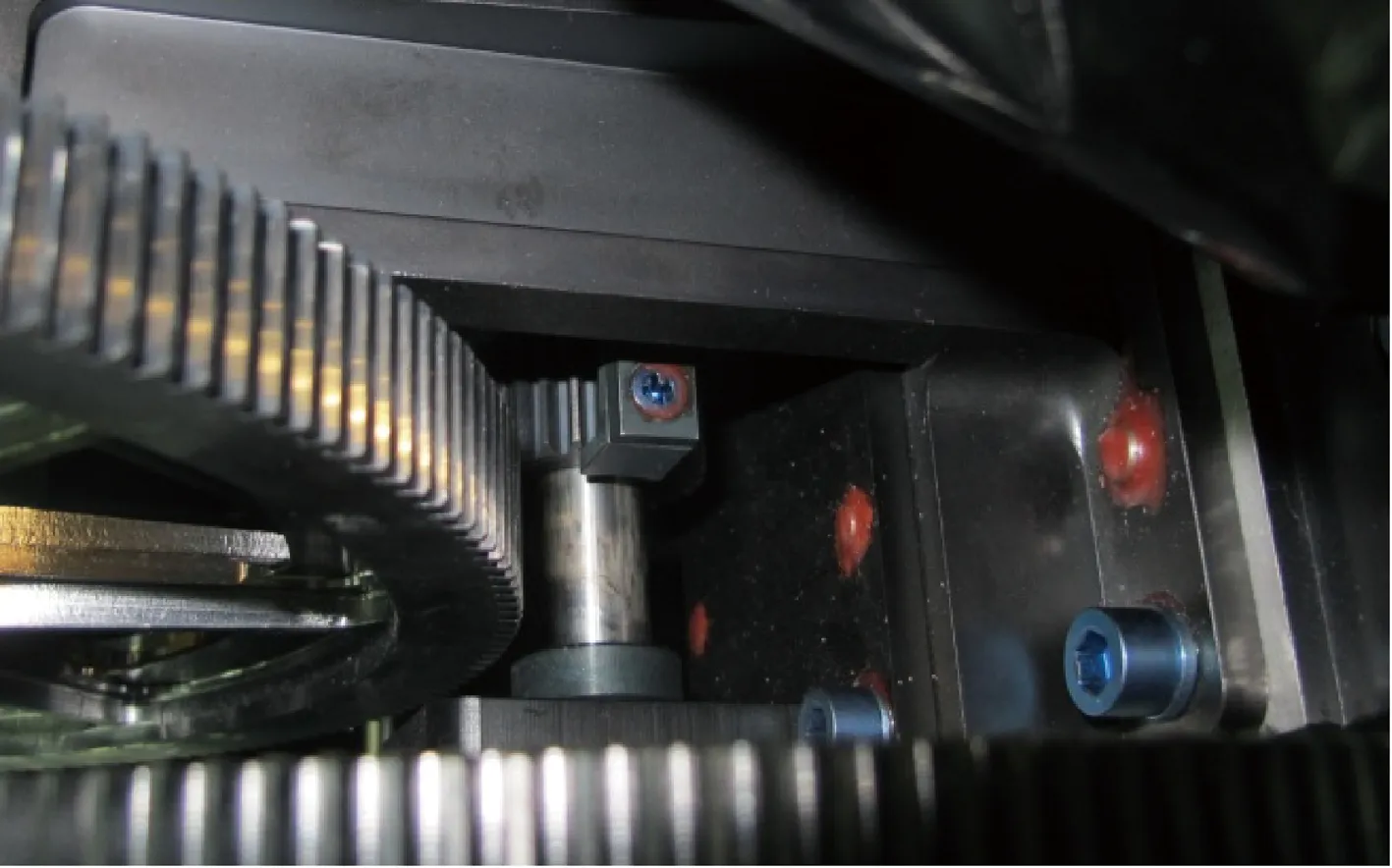
图6 主动齿轮被拖出啮合状态Fig.6 Status of drive gear pulled out of engagement
4 结论
本文针对某型号遥感相机定标机构设计了一种用于解决电机或控制电路故障的应急退出装置,利用研制产品进行了多项试验,对应急退出装置的功能和性能进行了验证。结果表明:
1) 应急退出装置额定直流工作电压为28 V,功耗为45 W,记忆合金棒收缩位移为5.0~5.5 mm;
2) 卷簧刚度为2.33 mN·m/(°),卷簧复位安全系数为6.3,可保证机构电机驱动力矩裕度为5.9,满足大于3的要求;
3) 应急退出装置分别在大气条件和真空环境下完成了验证试验,实测齿轮退出时间为137~143 s,卷簧驱动时间为8~9 s。
本文设计的退出装置具有结构紧凑、可靠性高、退出速度快、行程大、冲击小的优点,能实现可靠故障应急,适用于空间遥感器机构的故障预案,具有极大的工程应用潜力。后续将进一步通过试验研究卷簧在长寿命使用工况下的刚度变化情况,以期将本装置应用于更多长寿命空间遥感机构。