基于simulink的再生伪码测距关键技术实现
2019-07-05彭保童
马 宏,彭保童,张 超
(1.中国人民解放军航天工程大学 电子与光学工程系, 北京 101416; 2.中国卫星海上测控部, 江苏 江阴 214431)
再生伪码测距技术是深空测距体制中的新兴技术,在深空测距过程中,相对于透明转发测距,再生伪码测距具有测距精度高,无模糊距离大等特点,且由于实现了测距码的星上再生,消除了上行链路传输过程中引入的热噪声等,提高了下行链路中测距信号的信噪比,最高可达30 dB,这 部分信噪比可以用来提高测距精度、减小捕获时间或增加遥测信号功率[1]。在再生伪码测距过程中,测距码的捕获以及再生是关键环节,如何实现测距码的准确捕获以及准确再生是实现再生伪码测距的关键所在,同时也是本文研究的主要方面。根据CCSDS的建议标准书可知[2],测距码捕获的依据是最大值搜索法,其依据为本地探测序列与测距码之间的互相关性,当本地探测序列与测距码同相相关时相关值最大,最大相关值对应的本地探测序列即为捕获到的子码序列[3]。当所有子码序列均捕获完成后,按照与地面站相同的逻辑组合方式,重新生成与接收到的测距码完全相同的伪码序列,即实现了测距码的再生。
1 测距码的simulink实现
根据CCSDS关于伪码测距的标准建议书,测距码主要有Tausworthe测距码和Stiffler测距码两种选择,考虑到设备集成度以及兼容性,再生伪码测距应用中一般以权重平衡Tausworthe测距码为主,复合码由6个子码组合而成,其逻辑组合方式为[3]
C=sign(v×C1+C2-C3-C4+C5-C6)
式中:v为权重参数;Ci(i=1、2…6)为6个子码序列。
v的取值决定着测距码码型,当v的取值为2或4时分别为T2B码和T4B码,其中T2B码一般用于以捕获时间为主的测距任务,T4B码一般用于以测距精度为主的测距任务[4],如图1所示为T2B/T4B码的simulink仿真原理图。

图1 测距码的simulink仿真原理
其中+1、-1模块由延迟模块组成,按照+1、-1的顺序进行排列即可得到6个子码序列,然后以一定的逻辑组合方式即可得到Tausworthe码。仿真中Fcn模块为逻辑组合模块,通过改变逻辑组合中C1码的权重就可以得到T2B码或T4B码。
在再生伪码测距体制中,为了保护系统带宽,一般需要对测距码进行滤波成形,常用的成形方式主要包括方波成形、半正弦成形以及升余弦成形,综合考虑到设备的复杂度以及性能,在再生伪码测距过程中,测距码的半正弦成形方式应用较多[5]。图2为测距码半正弦成形模块。

图2 测距码半正弦成形模块
图3所示为测距码的两种成形方式的仿真结果,根据滤波成形的结果可知,半正弦脉冲滤波成形的结果是将码序列中的逻辑“+1”转换为半正弦波形中的正半周期,码序列中的“-1”转换为半正弦波形中的负半周期。因此在实际操作中,可以采用正半周期的正弦波与逻辑+1或者-1相乘得到半正弦成形信号。

图3 测距码的方波成形与半正弦成形
2 上行链路信号的simulink实现
在再生伪码测距系统的上行链路信号仿真中,测距信号与遥控信号以线性调制的方式调制到上行链路载波,其simulink实现原理如图4所示。
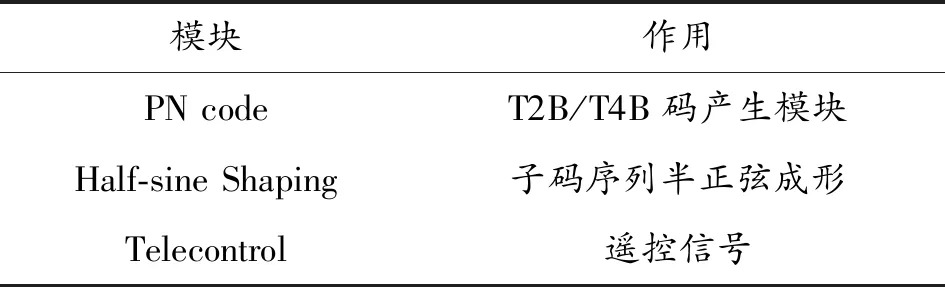
表1 上行信号模块
在上行信号的仿真中,遥控信号调制在副载波,然后再与测距信号一同调制在上行链路载波,其simulink仿真依据原理公式如下:

r1(t)+r2(t)
对上述公式继续分解可得:


由此可得上行链路信号为:
r(t)=r1(t)+r2(t)=
如图5(a)和图5(b)所示分别为测距码以及遥控信号的频谱,其中测距信号的频谱较宽,可以有效保护系统带宽,两种信号耦合后的信号频谱如图5(c)所示,可以看出,上行信号频谱中含有明显的时钟分量,有利于测距码的捕获。
3 子码序列捕获模块的simulink仿真
在再生伪码测距中,子码序列的捕获分为地面站和星上两种,其中地面站采用全并行捕获方式,星上采用串并行共同捕获的方式,捕获子码序列的判决方法主要包括最大值搜索法和门限值比较法,其中最大值搜索法为最优算法,主要原理为子码序列与测距码之间的互相关性,通过比较子码序列及其循环移位与测距码之间的互相关值实现,其中最大相关值对应的子码序列的相位即为捕获到的子码序列。但是当输入信号仅为噪声信号时,最大值搜索法有较高的虚假捕获概率[6],本文在最大值搜索法的基础上对捕获算法进行了改进,即通过对最大值搜索法得到的最大相关值进行验证可以消除噪声信号的影响,降低仅噪声信号输入情况下的虚假捕获概率。如图6所示为子码序列C3的捕获模块。表2给出了测距码捕获模块中各个模块的名称及作用。
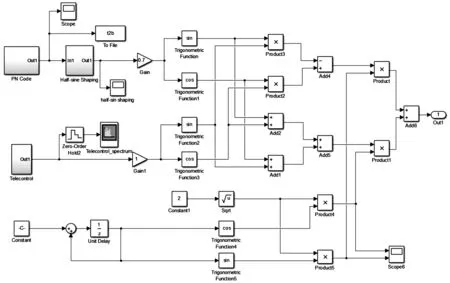
图4 上行链路信号的simulink实现原理

图5 信号频谱
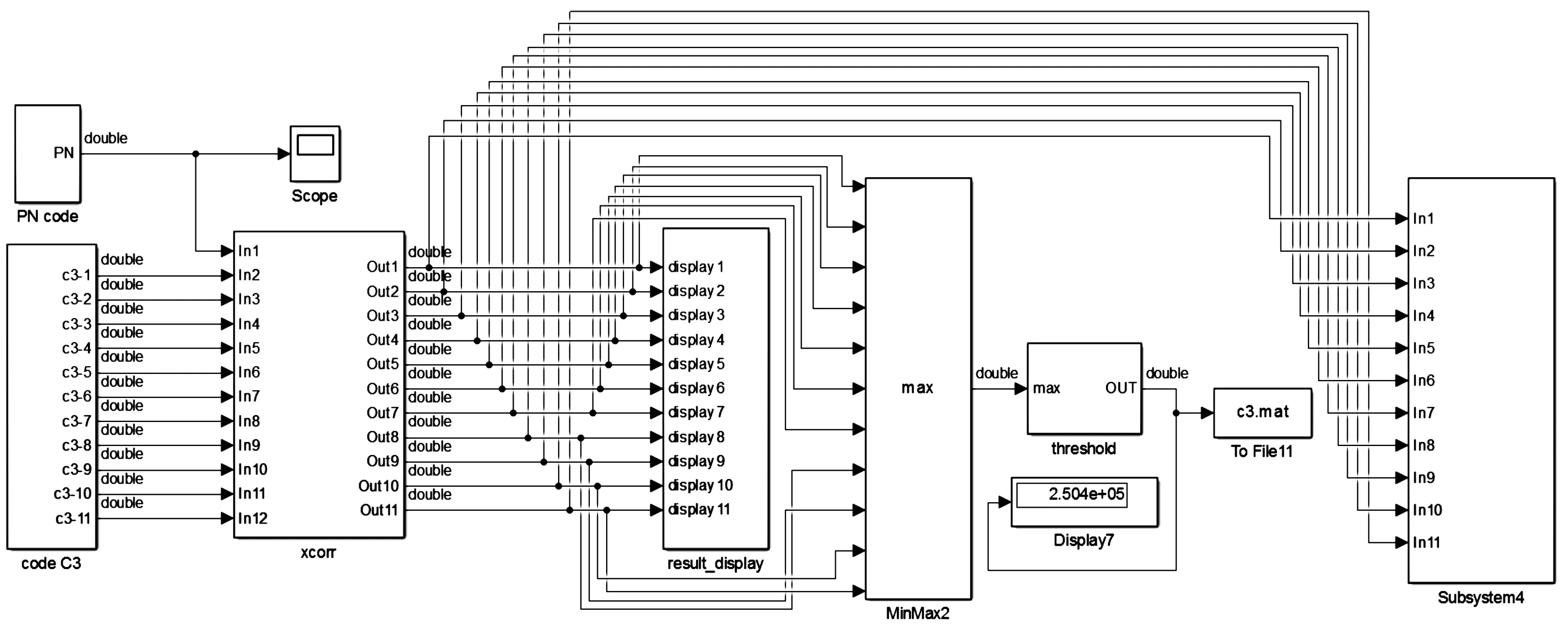
图6 测距码(C3)捕获模块
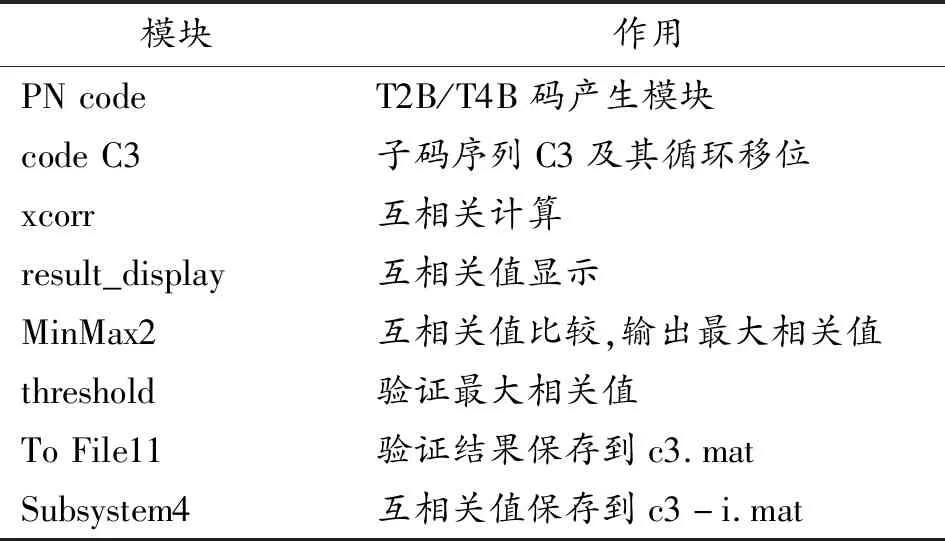
表2 捕获模块
如图7所示为本地探测序列与测距码的互相关模块,通过累加计算可以得到累加相关值[7],图8为相关值累加结果,其中标红点即为子码序列C3与测距码的同相相关值,为250 404。
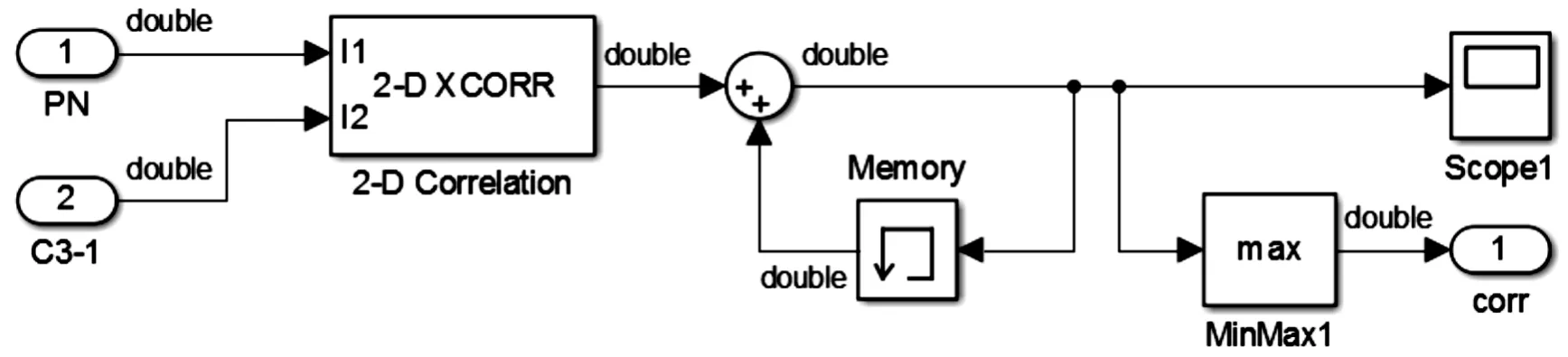
图7 互相关模块

图8 相关累加
如图9所示为最大相关值验证模块,switch模块的作用是对输入值进行判决[8],并根据判决结果决定输出值,当最大相关值大于等于设置的门限值时,输出即为输入值,若最大相关值小于设置的门限值时,输出值为0[9]。

图9 最大相关值验证模块
测距码捕获的simulink仿真基于级联改进捕获算法,较最大值搜索法而言,级联改进算法可以有效降低仅噪声信号输入情况下的虚假捕获概率,且捕获时间与最大值搜索法相差较小。
由表3可以看出,在级联捕获算法下捕获两种码的额外损耗均为0.4 dB,而门限值比较法下捕获两种码的额外损耗为3.1 dB[10]。由此可以看出,级联法造成的额外损耗比门限值比较法要小很多,在可接受范围内。
4 再生模块的simulink仿真
如图10所示为测距码再生模块的simulink仿真,其原理为将子码序列及其循环移位与测距码的互相关值与最大相关值作比较,若比较结果小于1,则输出值为0,其对应子码序列与输出值相乘;若比较结果大于等于1,则输出值为1,其对应子码序列与输出值相乘,将相乘后的结果相加就可以实现该子码序列的再生,待6个子码序列均捕获完成后,按照与地面站相同的逻辑方式将6个子码序列进行组合就实现了测距码的再生[11]。表4给出了测距码再生模块中各个模块的名称及作用。

表3 级联法与最大值搜索法捕获性能数据
如图11所示为10个异相相关值与做大相关值比较后得到的输出值,可以看出,异相相关值对应的输出均为0。图12为子码序列的再生序列,与设定的相位值相同。

图10 测距码再生模块
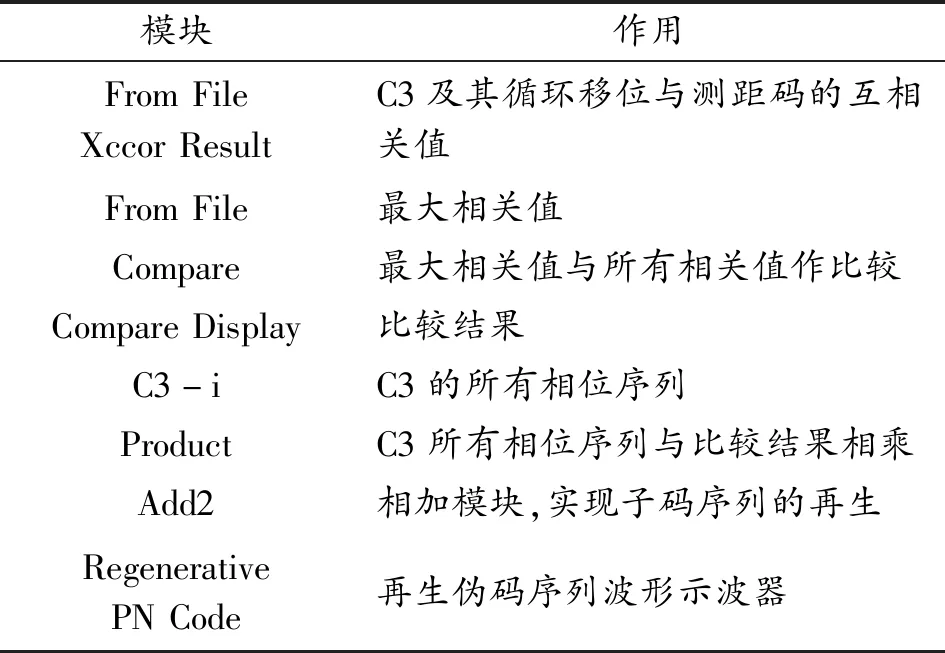
表4 再生模块
5 结论
本文基于再生伪码测距技术,对再生伪码测距系统中的关键技术进行了仿真设计,主要表现为测距码的捕获模块以及再生模块。通过simulink仿真工具对两个关键模块进行了搭建和仿真,同时对现有捕获算法进行了改进。根据仿真结果可知,测距码捕获模块可以有效实现子码序列相位的确认和捕获,测距码再生模块同样可以有效实现6个子码序列的再生并重新组合成与接收到的测距码的相位完全相同的伪码序列。

图11 各相关值比较后的输出值

图12 子码序列再生结果
