太空转位机械臂刚性特征研究
2019-07-05杨原青徐志刚王军义白鑫林
杨原青,徐志刚,王军义,白鑫林,张 伟,4
(1.东北大学 机械工程与自动化学院, 沈阳 110819; 2.中国科学院沈阳自动化研究所, 沈阳 110016;3.中国科学院机器人与智能制造创新研究院, 沈阳 110016; 4.中国科学院大学, 北京 100049)
我国计划在2020年建成近地空间站[1],空间站由核心舱、实验舱Ⅰ、实验舱Ⅱ、货运飞船及载人飞船等部分构成,各组成部分像搭积木一样构成“T”型结构,如图1所示。
整个空间站建造的过程中由于种种复杂的原因实验舱与核心舱一般选择轴向对接[3-4];为了空间站的建设同时也方便下一艘飞船的对接,需要把轴向对接的实验舱转到径向位置,这就需要转位机械臂,如图2所示。

图2 机械臂模型图
工作时,机械臂的一端安装在核心舱上,另一端连接上捕获连接机构[5]。当实验舱与核心舱自动对接完成后,装在核心舱上的机械臂将实验舱捕获,并按照预设的轨迹将实验舱由轴向对接口转到径向。
实验舱在外太空虽然只受微小的重力,但是由于其质量巨大,约为20吨[6],故机械臂在带动实验舱进行转动的过程中产生巨大转动惯量;这就要考虑转位机械臂的刚性,要确保能够胜任太空中的转位工作。
1 全物理实验方法原理
由于航天产品的特殊性,在地面上要对其进行全方位的实验以确保其可靠性。单就转位机械臂而言其试验方法就有很多种,美俄的全实物实验方法[7-8],李洪山,孙英达等提出了电惯量模拟机械转动惯量方法[9],即采用电机转动时产生的转动惯量模拟机械臂在太空中进行转位运动时的转动惯量。哈乐,房立金等提出了一种基于齿轮的负载等效惯量模拟方法[10],采用高精度齿轮箱在转动的过程中所产生的转动惯量模拟机械臂在太空中的转动惯量。王军义,贺云等提出了一种基于飞轮的半物理电动负载模拟方法[11],采用高精度飞轮组在转动时形成的转动惯量模拟机械臂在太空中转动惯量。
全实物实验方法虽然得到的数据可靠性和准确性较高,但是非常难以实现;基于电机的电惯量模拟、基于齿轮的等效模拟以及基于飞轮的等效负载模拟,虽然实现比较容易,但由于电机模拟或多或少都会带来一些额外的扭矩,实验结果的准确性和可靠性都比较差,为此设计了一套全物理的实验方法,克服以上方法的不足,准确模拟机械臂在太空中运行。
全物理实验方法主要由模拟核心舱的基体、气浮机构、机械臂、中间连接梁、模拟实验舱质量块、跟随移动小车及轨道等部分构成,如图3所示。

图3 全物理实验原理图
由图3可以看出在全物理实验中被测太空机械臂的腕关节部分与地面上模拟核心舱的基座固连,而肩关节部分则与中间的连接梁连接,中间的连接梁的另一端与模拟实验舱巨型质量块连接,质量块安装在气浮滑板上,由气浮滑板提供微重力,气浮滑板安装在跟随移动的小车上,小车在轨道上跟随运动,持续不断的给质量块提供微重力环境,形成“连续”的支撑,而实验的其他组成部分则由气浮柱提供微重力环境。
实验时,气浮机构为全物理设备提供的微重力环境,空间转位机械臂按照太空中的方式转动,由于是在气浮微重力环境下进行的实验,实验设备和支撑大理石之间为气体润滑摩擦力,可以忽略不计,从而机械臂在转动的过程中带动质量块跟随转动;为了持续不断的给质量块提供微重力环境,移动小车在轨道上跟随质量块运动。
在整个试验中只有被测机械臂本身的肩关节和腕关节处的驱动机构的动力源,并没有引入额外的其他动力机构,太空机械臂在实验中的运动方式和在太空中的转位方式也基本相同,整个试验得到的数据准确度较高为全真模拟。
2 全物理实验动力学建模
写出动力学方程主要有牛顿-欧拉法和拉格拉日法,这里采用牛顿欧拉法写出全物理实验装置的动力学方程。
2.1 全物理实验装置模型简化
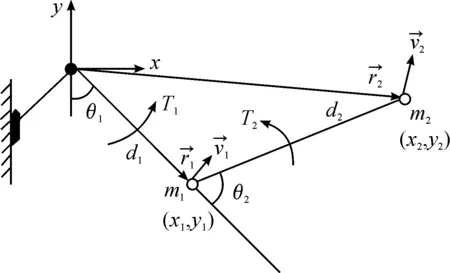
图4 全惯量简化模型

(1)

(2)

(3)

(4)
系统的总动能K为:


(5)
系统的总位能P为:

m2gd2cos(θ1+θ2)
(6)
系统的总能耗D为:
(7)
外力矩所做的功W:
W=T1θ1+T2θ2
(8)
2.2 牛顿欧拉法动力学建模
牛顿-欧拉方程的一般形式为:
i=1,2,…,n
(9)
式中的W,K,D,P的含义分别为外力所做的功、动能、所消耗的能量、位能;qi表示动能和位能的坐标,i为连杆代号,n为连杆数目。根据式(9),当qi=θ1时:
(10)
进一步对t求导则有:


(11)
(12)
(13)
将上面各导数带入到式(9)可得:

(m1+m2)gd1sinθ1+m2d2gsin(θ1+θ2)
(14)
同理qi=θ2时,有:

(15)

(16)
(17)
把以上各式带入式(9)后化简得:


(18)
可以将其写成一般形式:


(19)

(20)
将式(19)与式(20)写成矩阵的形式:
(21)
其中D11和D22分别是腕关节与肩关节处的转动惯量,则有:
(22)
(23)
2.3 关节处所受转动惯量
对全物理模型建立了动力学方程,得到了肩关节和腕关节所受转动惯量的表达式,把相关实验数据m1=30 kg、m2=7 700 kg、l1=1.4 m、l2=9.5 m,代进去可得腕关节和肩关节的转动惯量,分别如图5所示。
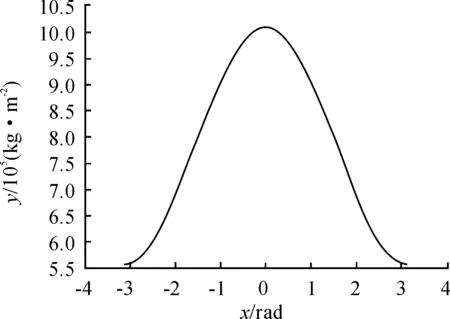
图5 腕关节转动惯量
由图5可知腕关节转动惯量的最大值为1.007 0×106kg·m2,最小值为5.052 6×105kg·m2;可见两者都大于所要求的3.2×105kg·m2。而对于肩关节的转动惯量由于它与转角θ没有关系,为一定值7.648 7×105kg·m2,可见其也大于所要求的3.2×105kg·m2,如图6所示为肩关节所受转动惯量。
无论是肩关节还是腕关节所受的转动惯量均满足实验要求,证明了全物理方法的有效性。空间转位机械臂能否承受这么大的转动惯量,将通过动力学和静力学分析来验证。

图6 肩关节处的转动惯量
3 空间转位机械臂特性分析
空间转位机械臂在太空中带动实验舱进行转位,由物理学可知其必然受到超大转动惯量。
3.1 空间转位机械臂动力学分析
采用如图7所示的Adams模型为空间转位机械臂进行动力学分析,将实验模型导入到Adams。

图7 Adams模型
通过对软件的相应操作,可以得到空间转位机械臂各个关节处的力和力矩如图8~图15所示。
分析图8~图11可知支座连接处、腕关节处、肩关节处以及连接梁和肩臂杆处所受的最大力分别为51 889.5 N、1.170 3×105N、1.156 3×105N以及1.121 2×105N。
分析图12~图15可知支座连接处、腕关节处、肩关节处以及连接梁和肩臂杆处所受的最大扭矩分别为:1.145 2×106N·m、1.123 8×106N·m、9.698 7×105N·m以及8.776 1×105N·m。
经分析可得各个关节处所受的力矩为:
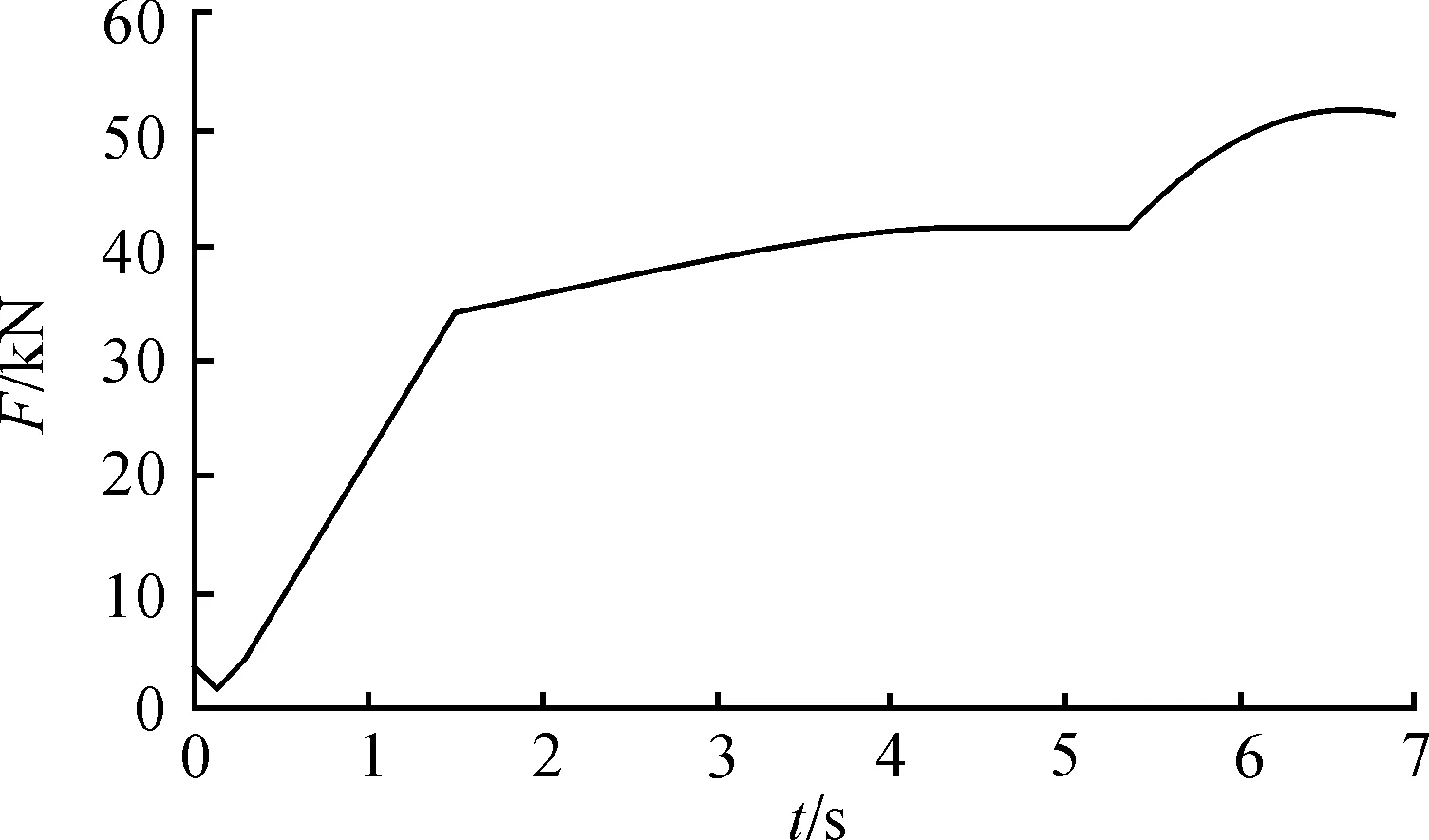
图8 支座连接处受力

图9 腕关节处受力

图10 肩关节处受力

图11 连接梁和肩臂杆处受力

图12 支座连接处扭矩

图1 3腕关节处扭矩
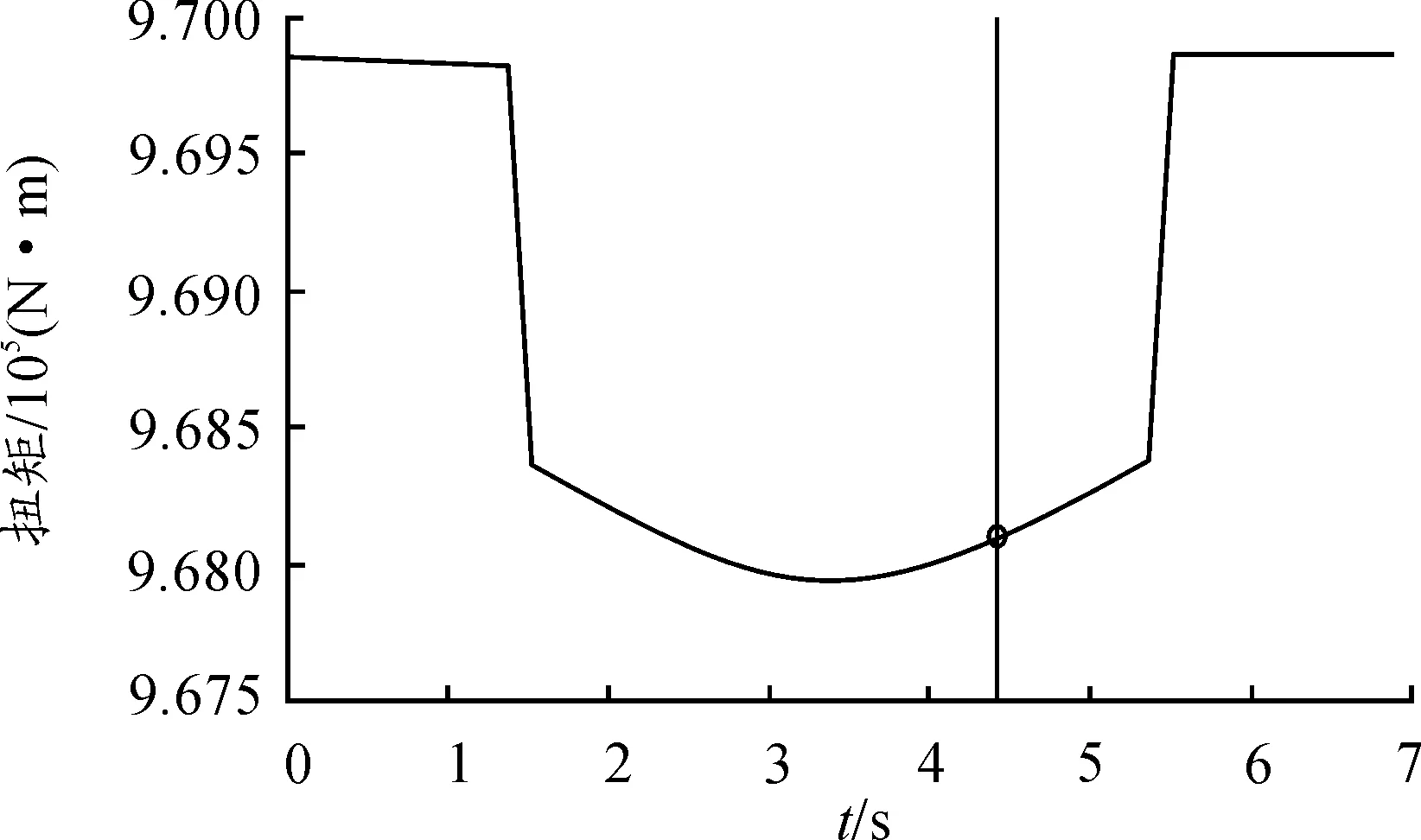
图14 肩关节处扭矩

图15 连接梁和肩臂杆处扭矩
3.2 空间转位机械臂静力学分析
能够进行结构力学仿真的软件很多,由于Ansys功能强大,操作方便,采用Ansys对全物理实验模型进行静力学仿真[15-16],实验数据则来自于上一节的动力学仿真,并且将最大力1.170 3×105N和最大扭矩1.145 2×106N·m带入建模可得机械臂关节在最大作用力下的变形如图16所示。
从图16可以看出整个机械臂在各个关节所受最大作用力下的总体变形,最大处为0.13 mm,证明了其能够带动惯量模拟机构进行转动,满足设计的要求。

图16 机械臂在各个关节受力下的总体变形
4 结论
通过solidworks建立三维模型,并用Adams对模型进行动力学建模,得到各连接部位以及关节连接处所受的力和力矩,最后把这些数据导入到Ansys中,通过Ansys的结构分析可知太空机械臂在刚性上满足设计要求,能够胜任太空中的转位任务;并且全物理实验装置的关键部件也满足设计要求。
