基于无人机的建筑外墙裂缝快速检查系统设计与实现
2019-07-02马国鑫尤少迪
韩 豫, 孙 昊, 李 雷, 马国鑫, 尤少迪
(1. 江苏大学 土木工程与力学学院, 江苏 镇江 212013;2. 澳大利亚联邦科学与工业研究组织, 悉尼 2601;3. 澳洲国立大学, 悉尼 2601)
在智慧地球与智慧城市等理念大力推广的背景下,以图像处理为代表的人工智能技术得到了长足的发展。传统建筑业生产、管理效率低下等问题,有了全新的解决方式。与此同时,2017年6月发布的《中国建筑施工行业信息化发展报告——智慧工地应用与发展》,也说明建筑业智能化是大势所趋。目前建筑业中,工程项目竣工验收与维保阶段,以建筑外墙裂缝为代表的一些质量隐患仅能以人工方式进行检查,往往难以察觉。墙面裂缝会导致雨、雪水渗入墙体,影响建筑美观,重则导致墙体涂料与防水材料等发霉、剥落,严重影响建筑物防水性能。但是,人工检查效率较低且精度不高,难以识别高层与复杂结构处的墙面裂缝。
以图像处理为代表的人工智能技术与无人机技术的成熟,为此提供了一个较好的解决方案[1,2]。图像处理作为一种愈加成熟的技术,具有检测速度快、精度高的优点,结合无人机灵活、易操作的优势,可以方便地获取和识别高层及复杂结构处的墙面裂缝。目前基于图像处理的裂缝识别方法一般有三种:(1)通过改进图像预处理算法,在增强裂缝对比度的同时,去除噪声以及细小干扰物[3~5],从而优化裂缝的提取;(2)结合裂缝的图像特征,改进裂缝提取算法,如通过最大类间方差法、快速迭代法,解决裂缝背景灰度不均、细小裂缝难以识别等问题[6,7];(3)基于神经网络[8]、深度学习[9]等技术,提升裂缝识别效率与精度,但此类方法对样本的质量和数量依赖较大。在已有的利用无人机进行裂缝检查的研究中, Zhong等[10]证明了机载图像与静态图像的图像质量一致;Pereira等[11]通过将部分算法集成于无人机中,提升了裂缝识别的效率。上述方法对实现建筑外墙裂缝的智能化检测,做出了大量贡献,但相关研究中,裂缝识别算法的适用性仍有不足,且未考虑实际应用中建筑外墙的窗框、附着物等复杂情况对裂缝提取的影响,自动化程度有待提高。
本文针对高层建筑裂缝图像难以获取以及墙面裂缝背景复杂、情况多变的问题提出了一种基于无人机的建筑外墙裂缝快速检查系统。通过改进的SFC(Sharp Filter Contrast)法和改进的Canny算法改善了裂缝提取效果。并基于建筑外墙裂缝图像特征,提出了一种新的裂缝图像筛选算法,提高了裂缝识别算法的适用性,使系统在实际应用中能够适应复杂多变的墙面环境。
1 建筑外墙裂缝检查系统需求分析
建筑外墙裂缝会严重影响住宅的防水性能,是工程竣工验收与维保阶段的重点检查项目。同时,工程维保阶段也需要根据裂缝分布情况,进行项目维护方案设计。但由于高层及复杂结构的建筑越来越多,裂缝的检查愈加困难。为改善相关问题,本文在分析裂缝检查现有不足的基础上,提出如下需求分析,如表1所示。

表1 建筑外墙裂缝检查系统需求分析
综上,亟需一种更加安全、便捷的建筑外墙裂缝检查系统。
2 建筑外墙裂缝检查系统架构设计
为解决上述建筑外墙裂缝检查中存在的问题,本文基于无人机及图像处理技术设计了如下建筑外墙裂缝检查系统。
2.1 系统构成及功能
本系统主要由图像采集装置、图像处理及分析系统、辅助设备及用户端构成。其中,图像处理及分析系统是本系统的核心。建筑表面裂缝检测系统构成及功能如表2所示。
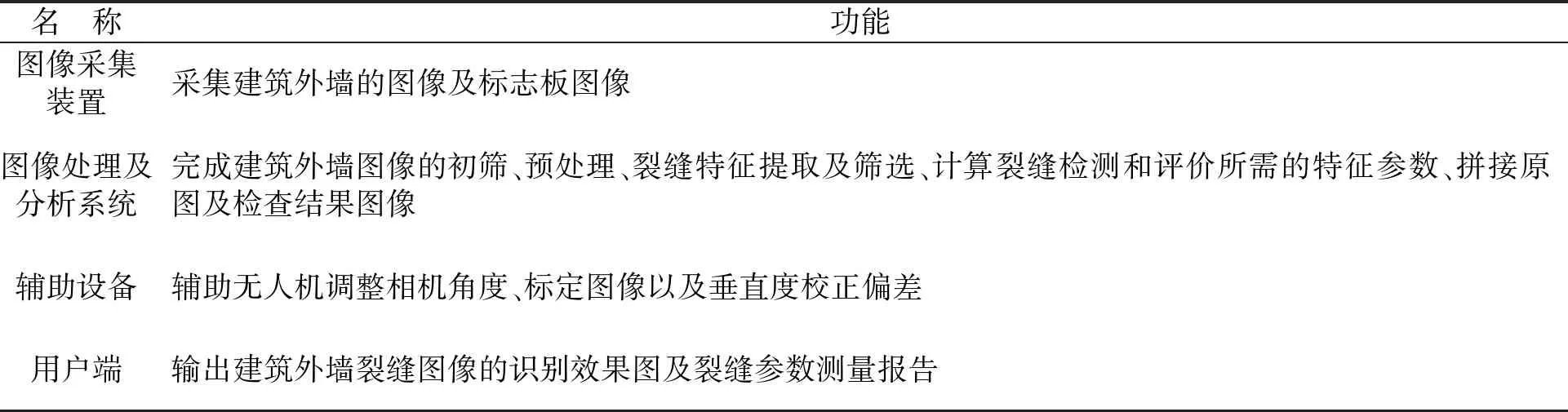
表2 基于无人机的建筑外墙裂缝检查系统构成及功能
其中,图像采集装置由四旋翼无人机和移动操控设备构成。辅助设备包括标志板与垂直度标杆,标志板为与外脚手架同一平面内含有5个黑色圆点及刻度线的纸质图案,包括处于周围相邻距离相等的4个黑色圆点及与周围4点距离相等的中心圆点;垂直度标杆为预先设置的垂直于地面且与建筑物外立面在同一平面内的刻度直杆。
基于无人机采集图像的建筑外墙裂缝检测系统构成如图1所示。

图1 基于无人机的建筑外墙裂缝检查系统构成
3 系统运行流程与核心算法
3.1 系统运行流程
本系统的运行流程包括建筑外墙图像采集、特征分析和结果输出三个部分。具体如图2所示:
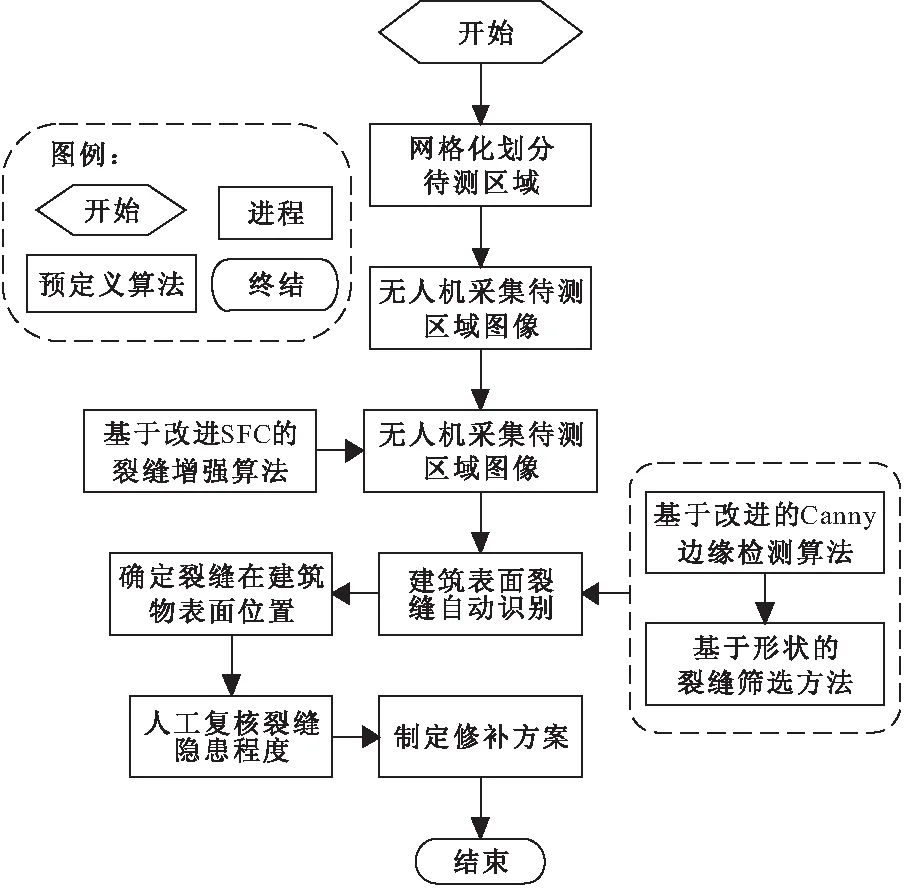
图2 基于无人机的建筑外墙裂缝快速检查系统运行流程
(1)建筑表面图像采集
先根据建筑物外立面特点,将外立面划分为若干矩形区域。并在采集图像前,依据标志板的成像调整无人机相机的角度,保证无人机相机与作业平面垂直,随后,使用无人机进行图像采集。
(2)裂缝图像特征分析
1)图像初筛及预处理。先根据预先设置的图像质量要求,筛选出符合质量要求的建筑物外墙图像,删除存在严重模糊、清晰度较低等情况的图像。接着,灰度变换后使用本文改进的SFC结合法实现建筑物外墙图像的滤波和增强处理。
2)目标提取及识别。在图像初筛和预处理之后,先使用本文改进的Canny边缘检测算子及Hough变换提取建筑物外墙图像中的图像边缘及垂直度标杆的边缘。然后,根据本文提出的基于形状特性的裂缝图像筛选方法识别出存在裂缝的图像,去除窗、墙体分割线等干扰物。
(3)结果输出
检查人员先参照无人机采集的建筑物外立面的整体图像,检查、校核识别出存在裂缝的图像,并剔除识别错误的图像,以提高系统的检查效率。接着,根据裂缝识别、分析及参数测量结果,并结合人工复核的情况及相关规范,编制建筑物外墙裂缝的检查报告与维保方案。
3.2 核心算法
本系统中核心算法包括基于改进的SFC结合法[12]的裂缝图像预处理方法、基于Otsu改进的Canny边缘检测算法以及基于形状特性的裂缝筛选方法。
3.2.1 基于改进的SFC结合法的建筑外墙裂缝图像预处理方法
建筑外墙长期受到雨水风沙的侵蚀,会有污损、脱落等情况干扰裂缝识别。SFC结合法是一种融合多种处理技术的图像处理方法,该算法的优点在于运算量小、效果好、失真度小等优点,十分适合建筑表面大批量的图像处理。但是,该方法中的四邻域平滑算法用于不同环境下的裂缝图像时,往往会产生降噪不充分或过度降噪等情况。鉴于此,本文采用自适应平滑滤波代替SFC结合法中四邻域平均平滑算法。从而针对不同情况自动调整滤波参数,使算法适用性更强。
自适应平滑滤波通过一种小的平均加权模板与原图像进行迭代卷积运算,迭代时根据周围的像素值,自适应地改变加权系数。这种方法能在抑制噪声的同时锐化图像边缘,提高检测效率。对于二维图像f(x,y),一次迭代计算步骤如下:
(1)边缘保留幅度系数h(h≥1)。
(2)按式(1)(2)采用差分计算梯度分量。
(1)
(2)
(3)按式(3)计算加权系数。
(3)
(4)按式(4)进行图像滤波处理。
(4)
使用该算法替换四领域平均平滑算法,得到改进的SFC结合法,主要步骤如下:
(1)使用直方图灰度拉伸法增强图像的对比度;
(2)对图像进行自适应滤波平滑1次和拉普拉斯锐化1次,重复该步骤4次;
(3)使用改进的直方图拉伸法对裂缝图像进行2次对比度增强处理;
(4)使用自适应滤波平滑裂缝图像2次和改进的直方图拉伸法增强对比度5次。
经过测试,该方法能够在保留图像质量基础上,有效地去除噪声,并提升图像的对比度,突出裂缝特征,从而有利于进一步的裂缝识别工作。
3.2.2 基于改进Canny算子的建筑表面裂缝提取方法
传统Canny边缘检测算子中,高、低阈值是人为设定的,很难同时保证真伪边缘的识别及边缘检测的连续性。为解决这一问题,达到较好提取结果及较好的适用性,本文使用Otsu法自动计算建筑外墙裂缝图像的阈值,作为Canny算子边缘检测所需的高阈值,然后利用高阈值为低阈值两倍的数量关系计算低阈值。
3.2.3 基于形状特性的裂缝图像筛选方法
在无人机采集的建筑表面裂缝图像中,一般会存在疑似裂缝的目标区域以及非裂缝的干扰区域。因此,提取的边缘信息既包括图像中的裂缝边缘,也包括墙体分割线、部分窗户等边缘信息,给裂缝的识别和测量带来了不便。
经观察发现,这些干扰信息一般为窗框、栏杆、结构缝等,多具有规则的直线特征,而裂缝多为不规则、方向性不强的曲线。因此,本研究将图像的曲线特征作为裂缝图像目标筛选的依据,主要包括裂缝骨架提取、像素坐标提取及线性特征拟合、裂缝线条曲率计算及判定三大步骤。具体实现步骤如图3所示。
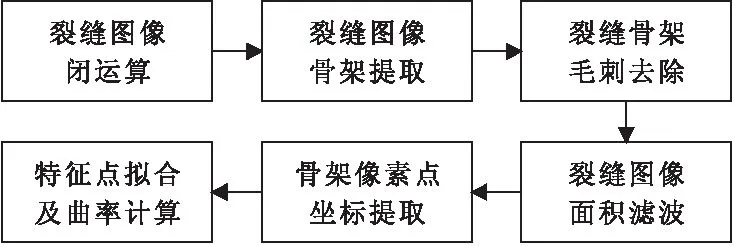
图3 裂缝图像筛选技术路线
(1)建筑外墙裂缝图像形态学变换及骨架提取。为得到裂缝的线性特征,进一步获取其曲率信息,在前文基础上,首先使用图像细化算法获取裂缝骨架。接着,通过图像闭运算消除部分细小毛刺或断裂情况。其中,根据裂缝的图像特征,选取线段形结构元素作为形态学变换的模板。
(2)裂缝图像像素点坐标提取及线性特征拟合。建筑外墙裂缝形态学变换和细化实现了将边缘检测后的二值图像转化为单像素的线条。在此基础上,需要提取二值图像中组成该线条所有像素点的坐标,并依据这些坐标拟合数学方程来刻画这些线条的线性特征,如图4所示。
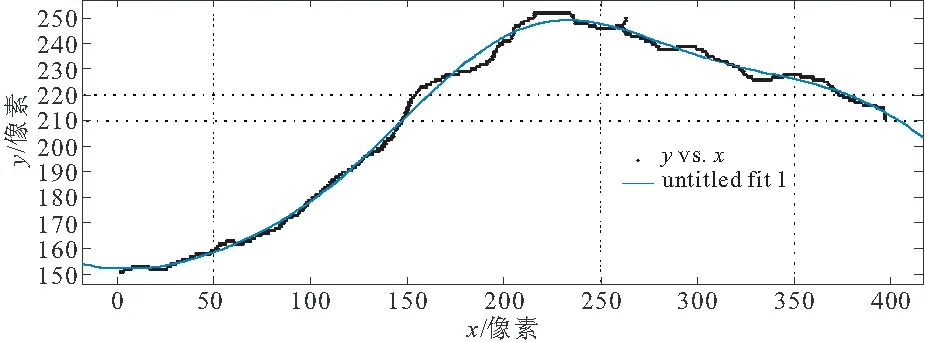
图4 裂缝曲线拟合
根据图4的曲率计算结果,该曲线任一点的曲率K≠0,故可以判断该图像中存在裂缝。
(3)裂缝线条曲率计算及判定。在拟合出线条的多项式方程后,计算线条上任意一点的曲率。根据结果,如果拟合出的是直线,可将其删除,如果拟合出的是曲线,在没有其他特殊干扰物的情况下,则可以判定该建筑外墙裂缝图像中存在裂缝需要对其进行处理。
4 系统实现与测试
4.1 测试条件
为证实本系统的可靠性与准确性,本文采用如下试验方法与环境。
本次测试使用无人机采集了不同地区和类型的建筑外墙图像共250 张,经过筛选,保留了质量相对较高的200 张图像作为本次测试的对象,图像大小标准统一为400×400 像素。图5所示为裂缝图像采集场景与所用无人机。

图5 裂缝图像采集场景与所用无人机
本系统所用硬件环境为:Intel(R) Xeon(R) E5-1241 v3 3.50 GHz处理器,32 GB RAM,Windows 8 64 bit,NVIDIA Quadro K1200图形显卡;软件平台使用Matlab 2017b平台。本测试所用无人机型号为大疆Phantom 3 Professional,摄像头有效像素为1240 万。
4.2 建筑外墙裂缝图像提取
依照前文所述对200张测试图像中的裂缝边缘进行提取,整体提取结果如表3所示。其中,误检率为检测出的非裂缝数目与实际裂缝数目的比值,漏检率为未检测出的真实裂缝数目与实际裂缝数目的比值,正确率=100%-误检率-漏检率。
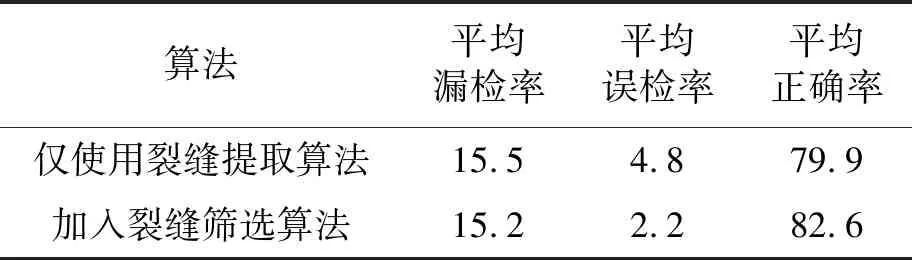
表3 全部建筑外墙裂缝图像测试效果统计 %
同时,为具体体现系统的测试效果,本文选取较具代表性的20个裂缝图像进行提取效果展示,如图6所示。其中,1~20为使用无人机采集的图像,1-1~20-1为本文所用算法提取的图像边缘效果。
人工统计出所有原图像中的裂缝数目、提取出的边缘数目(以识别出独立的连通区域作为边缘个数),统计结果如表4所示。
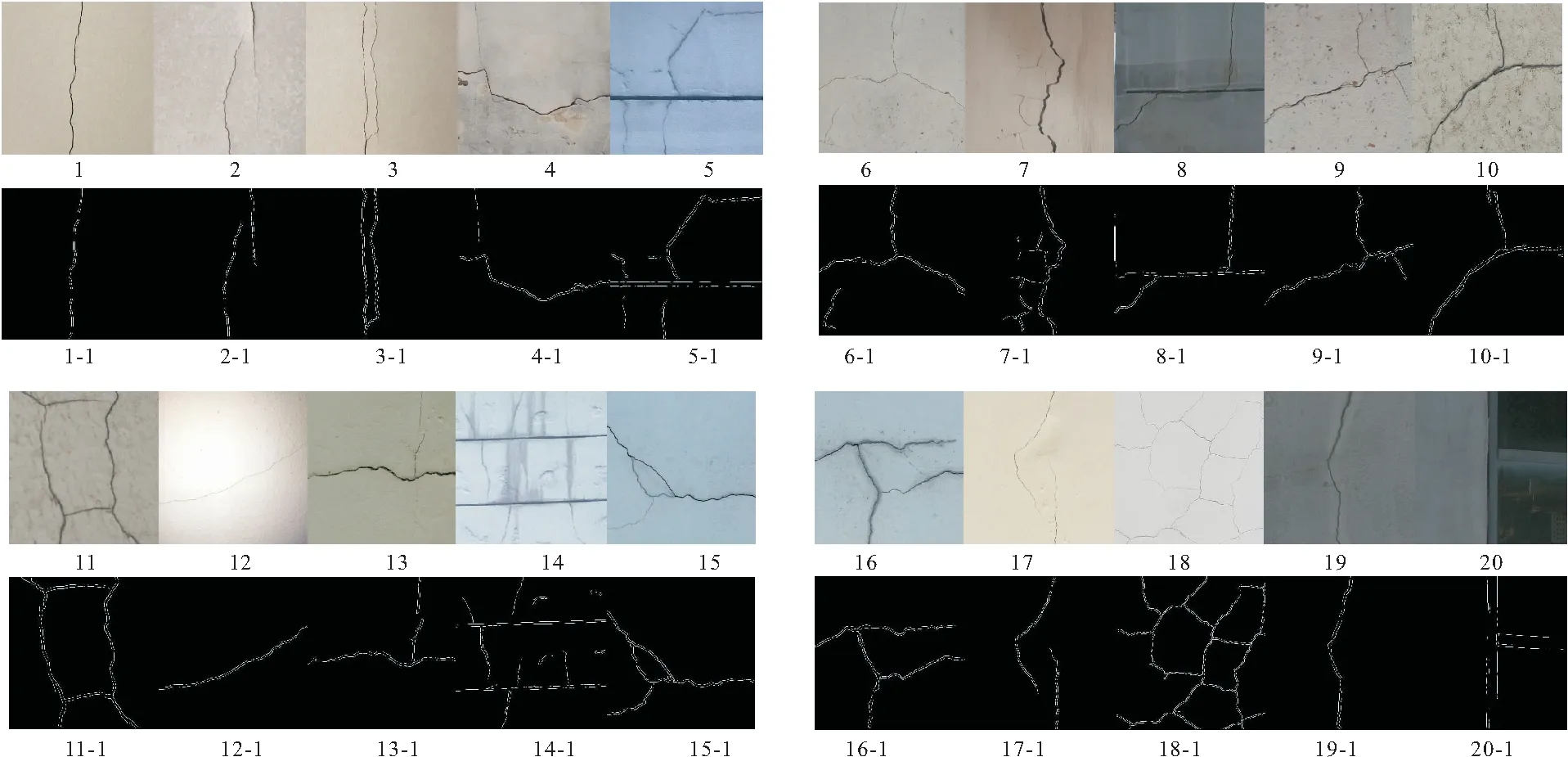
图6 裂缝边缘提取效果

项目序号1234567891011121314151617181920实际数目/条1323531034441375421620识别数目/条1222621243441265321510漏检率/%033.3033.34033.3002500033.314.302506.3500误检率/%00002002033.3000000000000
注:平均漏检率=19.7%;平均误检率=5.1%;平均正确率=75.2%
4.3 建筑外墙裂缝图像筛选
按本文的建筑外墙裂缝图像筛选方法,根据上文中所述的裂缝图像处理、线性特征拟合及曲率计算后,判断并剔除疑似裂缝中的非裂缝部分。部分裂缝图像筛选结果如表5所示。

表5 建筑外墙裂缝图像筛选效率统计
注:平均漏检率=16.4%;平均误检率=4.1%;平均正确率=79.5%
5 问题分析
由上文可以发现,裂缝筛选算法能有效减少误检率,提升裂缝识别的平均正确率。结合测试过程与结果,对系统存在的问题及对策进行分析。
(1)裂缝漏检影响因素及对策分析
测试中,如示例2,4,6等所示,漏检的裂缝主要为对比度较低的裂缝、过于细微的裂缝以及水渍中的裂缝等。这是由于本文对存在明显明暗交替、阶跃性灰度变化的图像,算法在增强明亮区域的同时也降低了较暗区域的灰度,导致较暗区域的裂缝信息被削弱。另外,如示例8所示,少数走向较直的裂缝容易被误认为是干扰因素而被筛去,导致漏检。
对此,在图像采集时,应充分考虑光照的影响,尽量避免图像中明暗变化太过明显。同时,在人工校核时,着重关注细微裂缝、水渍区域以及走向较直的裂缝。
(2)裂缝误检的影响因素及对策分析
测试中,如示例7,8所示,误检的裂缝主要为墙体引条线、窗户及窗台边缘。同时,较强光照下采集的图像中会出现周围物体的影子,因存在独立的形状和较强的边缘特征,也会被错误地识别为裂缝边缘。这是由于图像中干扰物较多时,该方法会提取较多无用的干扰信息和细节。
对此,可以考虑在预处理后、边缘检测之前,设置过滤条件,减少提取的信息量。同时,在图像筛选之前,通过Hough变换提取一部分直线并剔除,减少特征拟合的工作量。
(3)系统操作体验
本系统采集图像所用四旋翼无人机,操作便捷,相较于人工检查方式,能够更容易地采集建筑外墙图像,从而更安全、更方便地检查建筑外墙裂缝。但受到技术制约,无人机续航时间较短,数据采集能力有限。且按照系统规划方式采集图像,仍需一定时间练习。同时,对天气要求较高,需避开雨、雾以及寒冷天气进行检查工作。需根据天气妥善设定裂缝检查计划。
6 结 语
为解决现有建筑外墙裂缝检测方法效率、自动化水平低下等问题,本文设计并实现了一个基于无人机的建筑外墙裂缝快速检查系统。提出了针对建筑外墙裂缝而改进的SFC结合法和改进的Canny算法,提高了算法的适用性,使算法能够针对不同环境下的裂缝图像,自动调整算法参数。同时,提出基于建筑外墙裂缝图像特征的裂缝图像筛选算法,提高了裂缝的识别效率。
经过测试,该系统200 张测试图提取平均正确率为82.6%,具有良好的裂缝识别准确度,实现了更准确、更便捷的建筑外墙裂缝自动检查。但是系统尚未实现裂缝长度、宽度等参数的测量功能,无法进一步评估裂缝的隐患程度,后续将会进一步完善算法。