悬臂式掘进机导航技术现状及其发展
2019-07-01项杰杨尚武
项杰 杨尚武
摘 要:文章主要以悬臂式掘进机导航技术发展现状以及发展趋势为中心,首先介绍了悬臂式掘进机发展背景,其次对导航技术研究问题进行阐述,最后从几个角度研究了导航定位技术的应用与未来发展趋势。目的在于进一步提高悬臂式掘进机导航定位准确性。
关键词:悬臂式掘进机;导航定位;巷道截面;动态监测
中图分类号:TD632.2 文献标志码:A 文章编号:2095-2945(2019)14-0160-02
Abstract: In view of the present situation and development trend of the navigation technology of the cantilever roadheader, this paper first introduces the development background of the cantilever roadheader, and then expounds the research problems of the navigation technology. Finally, the application and future development trend of navigation and positioning technology are studied from several angles. The purpose is to further improve the accuracy of navigation and positioning of the cantilever roadheader.
Keywords: cantilever roadheader; navigation and positioning; roadway section; dynamic monitoring
悬臂式掘进机是掘进机中的一种,悬臂式掘进机导航技术研究,首先需要了解悬臂式掘进机施工方式。掘进机施工主要通过巷道断面的方式进行施工作业,具体作业方式分为两种,首先是全断面掘进机、其次是部分断面掘进机。当前我国应用最频繁的为部分断面掘进机,其中悬臂式掘进机最为关键。悬臂式掘进机导航技术研究一直在不断深入,其中不乏吸收国外先进技术,并且结合我国近些年的工作经验,但是导航技术研究却一直进步缓慢,并没有获得显著的成效。悬臂式掘进机在我国的正式应用,主要从1979年开始,作为引进设备,为我国掘进机发展推向全新进程。悬臂式掘进机导航定位研究,以导航定位问题逐渐总结全新的导航定位技术,推动我国悬臂式掘进机发展。
1 悬臂式掘进机发展背景
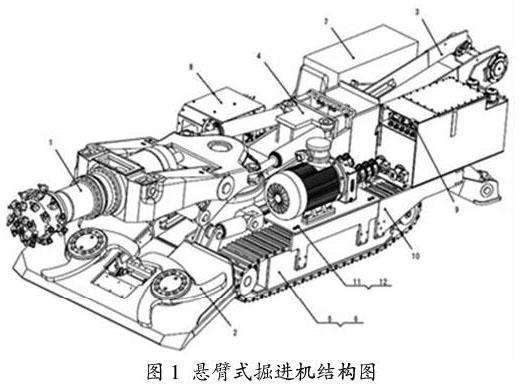
悬臂式掘进机技术的发展,我国最初出现是在20世纪60年代中期,当时的建设与发展对悬臂式掘进机需求极大,积极引进国外先进掘进机技术,并且通过对国产掘进机技术研究的经验积累,初步提出悬臂式掘进机研究设计理念。其中主要从小功率掘进机角度出发,设定功率为30-50kW,整体研究规模较小,当然研究成果并不是很显著。引进国外100多台掘进机,其中包括佳木斯煤机厂引进日本S-100型掘进机、淮南煤机厂引进奥地利AM50型掘进机等[1]。积极吸收国外先进掘进机技术,并且联系我国掘进机研究,使得我国掘进机技术研究更上一个阶层,同时这也为悬臂式掘进机导航技术的发展奠定了扎实的基础。图1为悬臂式掘进机结构图。
2 悬臂式掘进机导航技术研究问题
悬臂式掘进机导航技术研究中,因为导航技术具有特殊性,所以在发展中出现一些问题,困扰悬臂式掘进机导航技术发展。悬臂式掘进机本身以悬臂回转、俯仰的方式完成煤岩切割,并且实际工作中对机身、巷道底板依赖性非常大,这期间的摩擦力与截割位置阻力变化是保证悬臂式掘进机平衡的关键,只有悬臂式掘进机保持平衡的基础上,才能够真正实现底板相对静止,掘进机导航技术持续工作。悬臂式掘进机导航技术应用中,侧向截割阻力如果与巷道底板摩擦力不平衡,则悬臂式掘进机自身会出现失衡情况,直接影响到导航技术的参数变化,甚至出现偏转或者侧滑等情况。
相较于传统掘进机施工工艺,悬臂式掘进机采取激光指向仪的方式,及时投射出激光束,从而在巷道断面做出指示,准确对断面进行测量与截割,不仅可以确保悬臂式掘进机工作方向与巷道设计始终一致,同时还可以保证悬臂式掘进机导航准确。当然这其中需要在截割期间不断进行测量,测量过程中需要将悬臂式掘进机停机。悬臂式掘进机截割期间,因为巷道地质情况,出现大量粉尘,并且操作期间会发出噪音,这些都是威胁掘进机导航技术发展的关键安全隐患,尤其限制悬臂式掘进机自动导航发展[2]。自动导航技术可以帮助悬臂式掘进机实现远程控制,并且自动对巷道断面进行监视与截割,是掘进机自动化发展的标志。
但是悬臂式掘进机实际施工中,机身控制度不够,频繁出现偏转、侧滑等问题,掘进机姿态变化直接影响到位置参数与形态,因此想要实现自动导航,就必须随时对掘进机进行实时、动态定位。掘进机导航技术应用中,三维定位、三维姿态检测等,都是导航技术研究的关键。悬臂式掘进机如果以悬臂末端截割部位对巷道断面加以控制,并且精确悬臂式掘进机位置,科学预防在悬臂式掘进机姿态出现偏差。一旦这种情况得不到有效控制,就会导致巷道界面截割位置错位,影响掘进机运行准确性。悬臂式掘进机对于坡度控制,偏差必须≤±1‰。悬臂式挖掘机装配精良,即便在恶劣天气下依然能够持续工作。但是悬臂式掘进机工作精度会受到周围天气与环境的影响,导致其精准度下降[3]。
纵观悬臂式掘进机导航技术发展,虽然掘进机导航目标精准,但是因为检测技术与各种限制条件的影响,无法利用导航技术对巷道断面进行成型控制,这样一来就直接影响到悬臂式掘进机的导航定位准确性。悬臂式掘进机导航定位技术,必须以巷道为基础,沿着巷道的走向进行角度控制,以直线型巷道控制为主。悬臂式掘进机导航定位技术中,包括空间位置定位检测、姿态定位检测。必须彻底解决悬臂式掘进机导航定位控制问题,才能为悬臂式掘进機自动导航发展奠定基础[4]。
