回转装置静态角度通用高精度测量方法探讨
2019-07-01孙向东
孙向东
(国营第七八五厂,山西 太原 030024)
0 引言
随着科技的进步和设备自动化需求的提升,回转装置被越来越广泛地应用于光电跟踪、武器发射、安全监控等各个技术领域,对回转装置定位角度的精度要求也越来越高,往往需要精确到角分级。典型的回转装置一般同时具备方位和俯仰两套回转机构,分别用于实现方向和高低的角度定位。对这两个方向进行静态角度测量,以确定装置的定位精度是该类设备调试和试验过程中必须进行的工作。本文提出了一种实用且通用的回转装置静态角度测量方法,并对它的测量精度进行了核算。
1 原理
1.1 概述
如图 1所示,当一个旋转体转过角度∠a时,旋转体上的某一条切线转过∠b。可以知道∠a=∠b,也就是说,只要测得∠b,也就得到了该旋转体实际转过的角度。

图1 测量原理示意
1.2 角度计算
∠b的计算采用与定向角计算相类似的方法,即通过求两条直线夹角来得到。为避免承载平台倾斜对测量结果造成影响,上述直线为空间直线,即引入X、Y、Z三个方向的坐标进行计算,具体公式如下[1]:

(1)
其中:
于是可得旋转精度:Pn=Δα-θn。θn为上位机给出的角度值。
1.3 双站交会
要得到空间直线需对该直线两个端点进行空间坐标测量。测量使用双经纬仪通过双站交会算法得到。双站交会的算法原理如图 2所示[2]。S1(x1,y1,z1)和S2(x2,y2,z2)代表两台经纬仪,P(x,y,z)为空间待测点,两台经纬仪需要先进行标定操作,以建立共有的直角坐标系,和确定各自在该坐标系内的坐标。
S1和S2同时向P点瞄准后,读取各自的水平角和垂直角,即(β1,ε1)和(β2,ε2),代入以下公式即可得到P点的坐标:
(2)
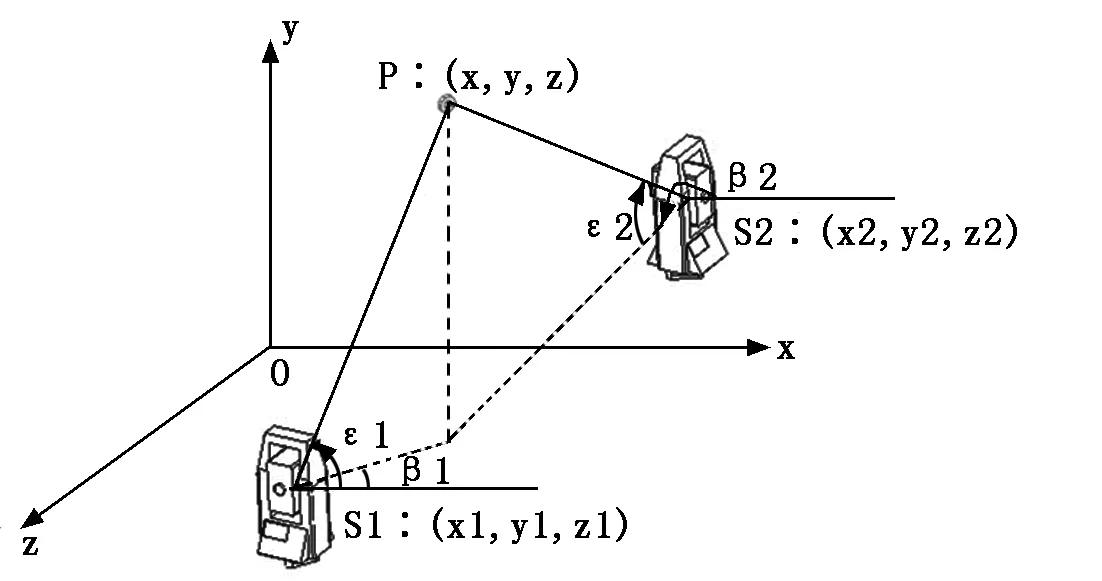
图 2 双站交会算法示意图
2 测量误差分析
测量误差主要由仪器误差、架设误差、观测误差、计算误差等几个部分组成。其中计算由软件完成,所有变量取双精度浮点数,因此计算误差可以忽略不计。其它三部分误差对计算结果的影响均体现在对被测点的观测和定位上[3]。
仪器误差即所用的经纬仪的测角精度,为2"。
观测误差由人工瞄准造成,属于随机误差,每次均不相同。所使用经纬仪最小刻度为1",则观测误差最大为0.5"。
架设误差属于系统误差,架设完成后进行测量时不会变化。在计算过程中,架设误差体现为公式(2)中的(x1,y1,z1)和(x2,y2,z2)。通常设经纬仪一位于坐标原点,即(x1,y1,z1)恒等于(0,0,0),y2未出现在公式中,所以只需考虑x2和z2的影响。架设时两台经纬仪间进行对觇标定,可设经纬仪二位于以经纬仪一为原点的坐标系的X轴上。则x2即为两台经纬仪间的直线距离,z2=0。但由于仪器误差和观测误差的存在,z2可能实际上不为0,即经纬仪二可能不是正好位于X轴上。z2的实际值与仪器误差、观测误差和x2有关,见下式:
z2=x2×tan(仪器误差+观测误差)
(3)
使用Matlab和数学仿真相结合的方法对测量误差进行定量分析[4]。从公式(2)中可以看出,经纬仪二的高度坐标y2未出现在公式中,对空间点的坐标测量没有影响。又从公式(1)中可以看出,经纬仪一的高度坐标y1在计算空间直线夹角时会被约减掉,对角度计算没有影响。所以在计算旋转角度时,可令仪器与待测直线位于一个水平面中,即忽略高低角ε。在图 3所示的模拟方位测量环境中,“OXYZ”为测量坐标系,“0'X'Y'Z' ”为回转装置坐标系,经纬仪一位于测量坐标系原点,经纬仪二位于X轴正向上,待测直线为回转装置前点和后点的连线,初始位置时令其与X轴平行,随后绕Y' 轴逆时针转过α[5]。虚线所示为两台经纬仪对于前点和后点的瞄准线。设待测直线长度为l,回转装置与X轴之间的距离为d,经纬仪二在X轴上的坐标为x2。根据矢量代数的方法就能得到两台经纬仪对前点、后点在旋转前后的理论观测值(见表 1)。此时将l,d,x2,α定为一个任意的确定值,就可以根据第1节所述原理计算得到旋转角。
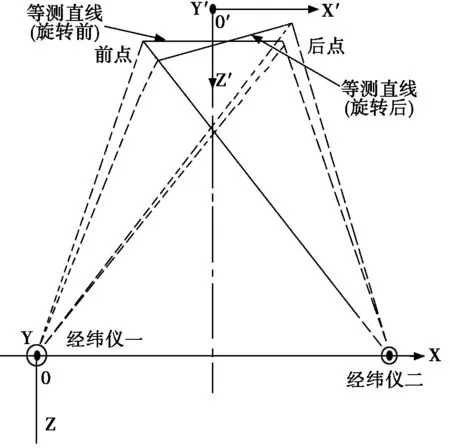
图3 模拟测量环境示意图

旋转前经纬仪一前点αtan2(d-m)x2-l后点αtan2(d-m)x2+l经纬仪二前点αtan2(m-d)x2+l后点αtan2(m-d)x2-l旋转后经纬仪一前点αtan(x2-l)sinα-2(m-d)cosα(x2-l)cosα+2(m-d)cosα后点αtan(x2+l)sinα-2(m-d)cosα(x2+l)cosα+2(m-d)cosα经纬仪二前点αtan(x2-l)sinα-2(m-d)cosα(x2-l)cosα+2(m-d)cosα-x2后点αtan(x2+l)sinα-2(m-d)cosα(x2+l)cosα+2(m-d)cosα-x2
接下来将仪器误差和观测误差引入理论观测值。为使观测误差对测量结果的影响最大化,应让前后两条直线角度变化最大且方向相反,因此可按表 2设置观测误差的符号。

表 2 观测误差符号设置
最后加入架设误差。因为有观测误差的存在,使得经纬仪二实际上并不正好位于X轴上,最大可能的偏差为:
z2=x2×tan(2"+0.5")
.
(4)
将这些误差值与前面模拟的观测数据叠加,再按第1节的方法求一次旋转角,与前面计算得到的旋转角相减,得到的就是测量误差。
实际测量时l、d、x2、α可能会是任意值,为使我们对这些参数对测量误差的影响有一个直观、全面的认识,先为各个变量设定一个取值范围:待测直线长度为定值1 m,α分别等于5°、10°、15°、……、90°,仪器位置为0.5 m~30 m,待测直线距离为0.5 m~20 m。然后利用Matlab编程绘制测量误差相对这些参数的变化规律的图形[6]。通过观察这些图形发现,在各个α角度上,误差变化规律基本相同。图 4所示为α=30°时的误差变化图形,角度单位为mil。
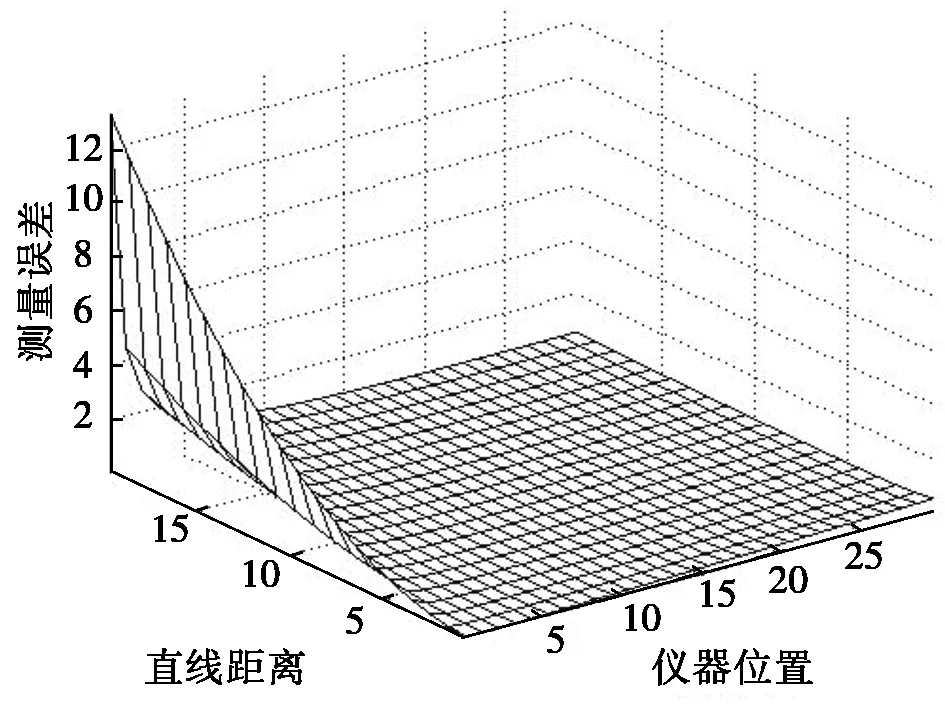
图4 测量误差变化规律图


图5 仪器位置与直线距离相互关系图
改变待测直线长度的值,再重复上述绘图分析过程。可以发现直线长度与测量误差基本保持线性逆相关的关系。即当仪器位置和直线距离不变时,直线长度变大1倍,测量误差就会减小1倍,误差小于0.1mil的区域扩大1倍,反之亦然。其它规律与前面相同。
3 测量方法改进
根据第2节对测量误差的分析,可对测量方法进行如下改进:
1) 使回转装置上设置的前点和后点相距尽量远;
2) 一台经纬仪让同一个人操作,尽量缩小观测误差随机变化的概率;
3) 按以下公式架设仪器:
(5)
其中:d:经纬仪与回转装置间距离,单位m;w:距离基数,取值范围为0.5~3.5,单位m;l:待测直线(前点与后点连线)长度,单位m;δ:最大可接受测量误差,单位:mil;x2:两台经纬仪间的架设距离,单位m。
4 结束语
本文既介绍了对回转装置静态角度进行高精度测量的理论依据,也对这种测量方法的误差进行了定量的计算分析。这些均是作者实际工作中的经验总结,被多个项目实践证明是切实可行的,希望对今后相类似项目的研制能有一些借鉴意义。也正因为此,这些方法肯定也存在它们的局限性,或者理论模型不够准确,或者操作方法不够简便,需要更多、更进一步的工程实践来完善,更需要这方面的专家不吝批评指正。
