面向机油泵零件关键尺寸的机器视觉测量*
2019-07-01杨建西林海波
杨建西,林海波
(台州职业技术学院 机电工程学院,浙江 台州 318000)
0 引言
机油泵是柴油机燃油系统中润滑系的重要组成部分,为润滑系提供足够压力和流量的机油,对柴油机的整机性能产生较大影响,特别是柴油机的使用寿命和节能效果[1-3]。转子式机油泵具有结构紧凑,工作可靠,供油均匀、效率高,成本低廉的优点,在中小功率内燃机上已获得普遍应用[4-6]。
机油泵运转时,因相关部件存在间隙,会产生较为剧烈的振动和噪声[7]。以转子式机油泵为例,外转子与壳体之间、内、外转子间、内转子与驱动部件间均存在间隙等,这些部位的间隙,即影响机油泵的容积效率,可能造成泄漏,同时在运转过程中,会产生不同程度的碰撞,从而产生较大的振动和噪声。所以,通过精密的制造、检测与装配,合理控制部件间的配合间隙,对于降低发动机的整体噪声和提高其性能至关重要。在实际工程设计与制造中,对转子型线的设计、制造和检测精度要求很高,但目前部分检测,靠人工检测不能满足检测要求。基于机器视觉的图像检测技术,以其固有的高精度、非接触式无损检测、自动化等特点,促使了机器视觉技术广泛地应用于生产的日常检测当中[8-9]。
由于图像边缘检测方法具有高精度和高效性,因而基于图像边缘检测进行机械零件检测的方法受到越来越多国内外研究者的关注。图像边缘检测算子、方法种类很多,例如边缘检测的经典算子[10-12]:Roberts、Kirsch、Log、Canny和 Prewitt 等算子,这些算子算法在针对含噪图像,边缘提取时,常常会使图像失真,可能得到模糊的细节或边缘,甚至会丢失掉边缘信息,同时也存在噪声加强等现象,边缘检测效果并不理想,难以满足工业生产上的需求。王珂等[13]在希尔伯特变换中引入高斯核函数,减少由于图像噪声对边缘检测效果所产生的影响。刘志伟等[14]通过使用视觉显著性检测算法与mean-shift分割算法的结合,实现了对显著性目标的分割。张琳梅等[15]将蚁群优化算法引入到红外图像边缘检测中,通过蚁群优化算法对弱边缘信息进行加强,提高了边缘检测准确性。徐超等[16]提出了一种基于视觉注意机制的粒子窗检测方法,实现快速、准确检测的同时,减少计算量。但这些边缘算法和检测方法在检测的效率和准确性等方面还不太令人满意。因此,利用工业CCD视觉测量系统和图像处理软件,探索对薄零件的几何量进行非接触、高精度、自动测量,并从拍摄的背光数字图像中提取出零件轮廓信息,建立一种新的应用于高精度薄机械零件的测量方法。
1 测量方案
1.1 测量项目的确定
通过对机油泵零部件的关键零部件结构与机构件运动进行分析,需要对转子(见图1)的曲线和制造误差等进行控制,进而实现机械性能和流体运动学性能的要求。

图1 被测机油泵转子
通过对转子及支撑轴间的配合及运动精度分析,确定关键尺寸测量主要集中在对中心距、圆度、廓形、尺寸精度这些平面内的几何量测量,比如圆柱度、平面度。因此,最终确定检测项目包括:内外转子型线,轴孔的尺寸精度、圆度、中心距等,但不能有厚度方向的几何测量。
1.2 测量装置
针对机油泵内外转子生产实际技术存在的问题,搭建基于机器视觉测量技术的测量系统如图2所示。系统由硬件部分和软件部分组成,根据测量的视场和精度要求,选择如下设备,建立硬件系统,负责整个视觉测量系统的图像采集工作。软件部分主要是通过对采集到的图像进行预处理、边缘提取等方法来完成图像处理和图像测量。

图2 测量系统整体结构示意图
如图2,通过竖直导轨滑块上下移动,调节镜头与被测物、光源间的距离。这样避免了人工移动相机镜头带来的误差。采用背光源照射方式,利用控制系统,根据照明环境要求,进行参数调节,实现图像和背景最佳分离。
1.3 测量步骤
以LED作为照明光源,采用AVT Cameras的Stingray 系列可变焦一体化光学透镜CCD工业摄像机,用来接收光电传感器的外部触发,担负着图像采集的任务,进而提取出零件信息。同时,在对图像进行正式处理前进行图像的预处理,以期达到提升图像质量,如图3所示。由于数字图像对图像进行采集、传输、量化、还原后得到的,在采集、传输等过程可能受到一定程度的破坏和各式噪声污染,需要在早期弱化、消除此类干扰,以达到增强图像目的。然后利用双线性内插值算法获取4个最邻近目标像素的像素值,乘以权重系数,再进行像素细分,利用边缘检测查找边缘及附近像素并进行处理。基于多项式拟合,确定以亚像素为单位的零件边缘数据。
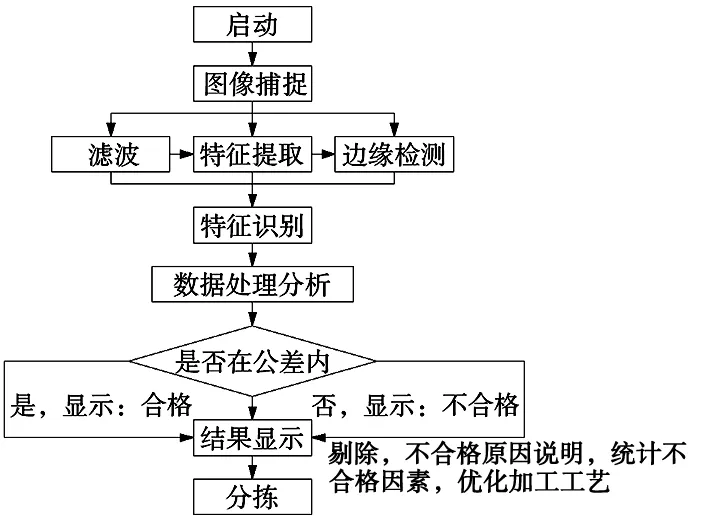
图3 图像处理过程
2 图像处理
图像在空间坐标和亮度上经过数字化后,可视作一个实数矩阵,将图像进行处理,转换为对矩阵的各种运算,实现了对图像进行精确检测和测量,本质上是精确定位图像边缘。
由于考虑利用微分算子进行边缘检测存在“提升噪声”缺陷,采用曲面拟合[17-18]思路,用曲面的梯度代替点的梯度,减少噪声影响,从而实现边缘检测。上述方法中,函数的选择非常重要,在实际工程运用中,通常采用低价多项式。
令图像面积元Δs由4个相邻像素f(x,y+1)、f(x+1,y+1)、f(x,y)、f(x+1,y)。以一次平面进行拟合时,用一次平面g(x,y)=ax+by+c去逼近图像面积元Δs上4个相邻像素,即g(x,y)去逼近f(x,y)。已知f(x,y)与g(x,y)之间的均方误差ε:
(1)
即:

(2)
求一次函数系数a,b,c,为达到最佳吻合,应使均方误差最小,令:

(3)
可解得一次函数系数a、b、c。
上述式中,a,b分别是两列、行的平均值的差分,此处的差分建立在平滑基础上,其过程是求平均后再求差分,因而对噪声有抑制作用。此平面是对已知2×2邻域内的图像灰度级的最好近似,即检测出的边缘尽可能在实际边缘中心。
但在实际应用时,一次曲面不能满足精度要求,因此采用二次曲面拟合,令图像面积元Δs由如图4所示九个相邻像素组成:

图4 二次曲面拟合用九邻域参数
用二次曲面g(x,y)=ax2+bxy+cy2+dx+ey+g去逼近图像面积元Δs上9个相邻像素,即用g(x,y)去逼近f(x,y)。f(x,y)与g(x,y)之间的均方误差:

(4)
现在求一次函数系数a,b,c,e,f,g,令:
可解得a,b,c,e,f,g。
根据中心极限定理,经光学成像后的物方空间灰度剧变的边缘,其灰度变化符合高斯分布,曲线顶点为边缘的精确位置。由于二次曲线是高斯曲线的高次逼近,以其来近似高斯曲线,误差小,计算效率高[19]。因此,对窗口内的阶跃边缘梯度,获得二次曲面的极值点,该点为亚像素边缘。
3 数据分析
3.1 零件特征提取
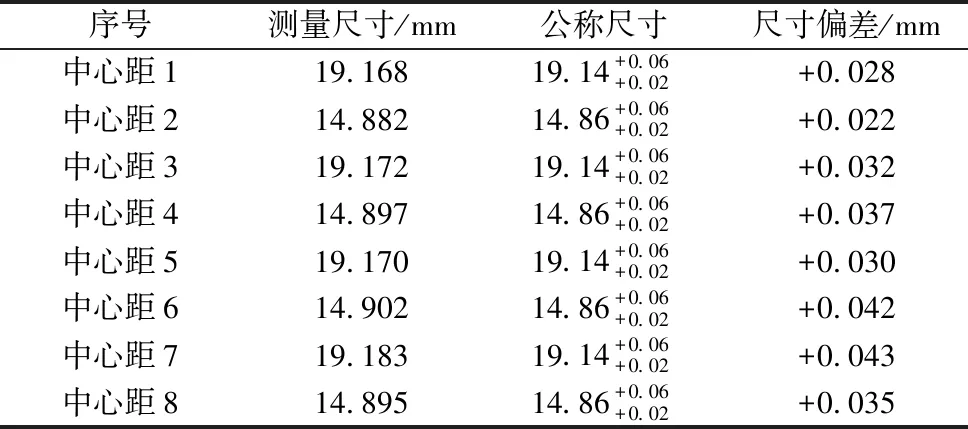
边界提取的结果是图像轮廓边界上一系列点的集合,具有亚像素级配准精度的图像边缘,轮廓点定义为pi=(ri,ci),i=1,...n。某一轮廓由多种不同类型几何元素组成,将轮廓进行分割,实质上就是找到轮廓有序点的子集,pij=(rj,cj),j=1,...m,m 图5、图6为某机油泵中间体的背光数字图像。其亚像素边缘轮廓如图7、图8所示。为了测量机油泵外转子的精度,需要将其分段。本文采用Ramer算法实现分段。 图5 机油泵外转子背光 数字图像 图6 机油泵内转子背光 数字图像 图7 机油泵外转子亚像素轮廓 图8 机油泵内转子亚像素轮廓 Ramer算法是将曲线用一系列点近似表示,并减少数据点数量的一种算法。对轮廓可以使用递归的方式,迭代其间的每一个点,遍历所得全部线段到各对应的轮廓段的最大距离小于某一指定的阀值,即要求这个距离超过阈值,则以这个点作为新的起点/止点。图9所示为截取的部分轮廓,从宏观上看,是由一段连续的圆弧和一段直线的组合,微观上是系列点的集合[21]。如直线AB所示,轮廓上的点到直线AB的距离显然过大,如图9a所示。采用在曲线中间插入点,对其进行密化,直至曲线上的点到直线距离符合预先设定阈值。在对非圆曲线拟合过程中,如果圆弧拟合允许误差比与两直线的最大误差小,则这两直线列为合并处理对象。 (a) 首尾相连 (b) 插入中间点 (c) 数据密化 (d) 二次密化 图9 Ramer算法细分亚像素边缘 图5~图8为机油泵内外转子数字图像提取的轮廓,轮廓基本上为圆弧段组成,制造精度要求为公差在+0.02mm~+0.04mm。如采用传统人工方法进行测量,需要测量、计算中心孔的孔径圆度误差,还要采用多组量具,利用间接法进行测量中心距,生产效率和精度低。由图5可知,外转子内轮廓为16段圆弧的组合,其中,圆弧的制造其精度和孔中心距精度,直接影响泵的工作效率、振动及寿命等,严重影响泵整机性能。为了验证文中方法的实用性和精确性,在上述实验环境下进行实验验证,以对机油泵的外转子为目标进行提取,然后对试验结果进行分析。表1为对外转子内轮廓测量所得的中心距数据,采用最小二乘法,拟合完成中心距测量。通过分析测量数据,可知该机油泵中间体的尺寸偏差均在公差范围内,可以用于机油泵工业生产中。 表1 机油泵外转子内轮廓测量数据 图6所示的机油泵内转子数字图像提取的轮廓,需要保证基准孔的圆度公差和中心距,采用最小二乘法圆拟合,测量中心距及半径,测量结果如表2所示,可以看出,机油泵内转子满足精度要求。 表2 机油泵内转子测量数据 研究通过非接触、高精度的视觉系统和图像处理软件,实现对薄类零件几何量的自动化的测量。利用曲面拟合来确定亚像素边缘可减小噪声对边缘的影响,提高了边缘的定位精度,有效地应用在机油泵关键零件的中心距、圆度等几何量的中高精度(IT5~IT7)测量。检测时间从人工检测的30min减少到2min,该方法具有高检测准确精度和检测效率。方法的特点总结如下: (1)基于机器视觉的显微检测,系统自动获取图像、提取亚像素边缘、提供检测数据,极大提高效率,减少人工操作误差; (2)计算背光数字图像局部二次曲面的极值点,确定亚像素边缘位置,降低噪声的影响; (3)本方法高效应用于中小机械零件的中心距、圆度等几何量的中高精度(IT5~IT7)测量,但不能用于测量厚度方向的几何量,比如圆柱度、平面度。




3.2 误差分析

4 结论