基于ADMM算法的航空发动机模型预测控制
2019-06-26单睿斌李秋红何凤林冯海龙管庭筠
单睿斌,李秋红,何凤林,冯海龙,管庭筠
(南京航空航天大学 能源与动力学院 江苏省航空动力系统重点实验室,南京210016)
模型预测控制(Model Predictive Control,MPC)具有显式处理航空发动机工作中约束的能力,可以简化航空发动机控制系统的结构,在发动机控制领域获得了广泛的关注[1-4]。MPC通过在线优化的手段获得最优控制量,因此高效的在线优化算法可以提升MPC的实时性,有助于其在航空发动机上的应用。常用于MPC的优化算法有二次规划(Quadratic Programming,QP)[5]和序列二次 规 划 (Sequential Quadratic Programming,SQP)[6]。SQP方法在每次迭代中需要计算一个QP子问题,计算量大,实时性较差;求解QP问题的方法包括内点法(Interior Point Method,IPM)和有效集方法(Active Set Method)。有效集方法每次迭代需要判定有效集操作,且无法利用MPC问题稀疏性求解,适合控制变量和约束数量较少的情况[7];IPM在每次迭代中需要求解 Karush-Kuhn-Tucker(KKT)系统,可以利用 MPC的稀疏性加速求解,但是在迭代过程中KKT系统会改变,每次迭代需要进行矩阵分解或者求逆操作[8],在约束多或预测时域较长的情况下计算耗时较多。
交替方向乘子法(Alternating Direction Method of Multipliers,ADMM)于 1975年提出,在20世纪80年代获得广泛讨论[9],其将一个大的、具有可分结构的凸优化问题分解为几个小的优化问题,降低了求解的难度和算法的复杂性。近10年来,原本用来求解变分不等式的 ADMM在优化计算中被广泛采用[10-12]。
本文通过引入辅助变量将航空发动机MPC中的QP问题转化为可分结构的优化问题,并基于ADMM算法对其进行求解,与IPM算法进行比较,验证了ADMM算法的优越性。
1 航空发动机MPC问题
航空发动机控制系统具有稳态控制、加减速控制[13]、超限保护控制[14-18]、抗执行机构积分饱和等功能。传统的发动机控制系统各功能模块通过min/max选择、切换等逻辑综合为一个整体,控制结构复杂。在MPC中,控制量通过求解一个约束最优化问题来获得,只需要一个优化控制器,就可以实现上述所有控制功能,且避免了设计过程中的保守性,因而得到了广泛的关注。
在单输入MPC中,取二次型性能指标,在采样时刻d之后的预测时域内,航空发动机MPC的目标是求解在预测时域内使性能指标J最小的燃油流量Wfb输入序列,同时满足发动机低压转子转速Nl、压气机出口静压 P3s和低压涡轮出口总温T6不超过其最大值。可表示为

式中:ref为高压转子转速指令;Nh为高压转子转速;λ为权重系数;np为预测时域的长度。
求解式(1)需要获得各个输出量和 Wfb之间的解析表达关系。在采样时刻d将发动机表示为一个线性系统为
式中:N=[Nl,Nh]T为状态量;ye=Nh为被控制量;yc=[Nl,P3s,T6]T为需要限制的量;A、B、C和D为系统的系数矩阵;Cc、Dc为限制量对应的输出矩阵。
利用离散系统状态方程的响应:

可以获得输出量在预测时域np内的预测值,其预测方程为

式(1)可以改写为一个带有线性不等式约束的二次规划问题:

式中:Ymax为由 Nlmax、P3smax和 T6max组成的适当维数的与对应的限制序列;Umax为由Wfbmax构成的输入限制序列。
通过求解QP问题式(7),可以获得满足约束条件下,使性能指标最小的最优控制输入序列
为了实现闭环非线性控制,将序列的第一个值Wfb(d+1)作为发动机所需燃油输入量,然后在d+1采样时刻,根据发动机的状态变化重复进行线性化,构造QP问题,求解输入序列。这样在每个采样周期求解的是一个线性MPC问题,但在整个时域内是一个非线性MPC问题。
MPC通过迭代进行优化搜索来获得最优的控制序列,如果迭代过程耗时较多将限制算法的应用。ADMM算法具有对偶上升法的可分解性以及乘子法的全局收敛性,近年来得到了大量关注,由于其所需计算量小、算法结构简单,本文将其用于求解航空发动机MPC中的优化问题。
2 交替方向乘子法

ADMM算法可用于求解形如的约束规划问题。式中:x∈Rn,z∈Rm为待优化变量;f(x)+g(z)为待优化的目标函数;L∈Rp×n,M∈Rp×m,c∈Rp,Lx+Mz=c为问题需满足的线性等式约束。
通过乘子法,引入对偶变量y,构造增广拉格朗日函数:

式中:ρ>0为惩罚参数。
ADMM迭代过程与对偶上升法和乘子法相似,包含3部分:原始变量x的迭代更新、原始变量z的迭代更新和对偶变量y的更新过程,更新策略为[19]

可以看出,在 ADMM算法中,原始变量 x和原始变量z的迭代更新是一个交替进行的过程,每个求解过程只需求解部分变量,降低了求解规模。
3 航空发动机MPC的ADMM算法实现
将式(7)所描述航空发动机MPC中的QP问题简写为

式中:P=HTH+λI为正定对称矩阵;
为应用ADMM算法,首先添加辅助变量,将式(11)改写为等式约束的形式:

由于式(12)所描述的QP问题不具有可分形式,不能直接采用ADMM算法进行求解。为此将x和z视作为一个整体变量(x,z),引入辅助变量约束)=(x,z),式(12)可以写为

式中:f2(x,z)为集合的指示函数集合的指示函数。
引入对偶变量 (w,y),根据式(10),可以得到求解式(13)的ADMM迭代过程为[20]

式中:σ为惩罚系数。
式(14)表示辅助变量的更新过程,是一个等式约束的QP问题,其一阶最优性条件(KKT条件)为

式中:v(k+1)为拉格朗日乘子。消去,可以获得

式(18)的系数矩阵称作KKT矩阵,该矩阵是一个列满秩的对称矩阵,因此方程具有唯一解。观察式(18),KKT矩阵的结构只和式(11)与参数ρ相关,在迭代过程中是不变的。~x(k+1)与 v(k+1)可以通过式(20)获得:



为了加速算法收敛,根据文献[12],加入松弛因子 α∈[1,2],迭代过程式(22)和式(16)变成

根据QP问题的一阶最优性条件,定义QP问题式(12)的原始残差rprim和对偶残差rdual:

根据2个残差给出收敛判定准则:

一般取εrel=10-3,εabs根据需要精度选择。
使用ADMM算法还需要一个初始值,由于MPC问题的特殊性,可以将d-1时刻的最优解(x*(d-1),y*(d-1))作为 d时刻的算法初始值,即

因此可以获得航空发动机MPC求解控制输入Wfb的流程:
1)获得发动机采样时刻 d的状态和状态方程。
2)以二次型性能指标和约束,根据状态方程建立问题式(7)。
3)将问题式(7)改写为适合用 ADMM算法的形式(13)。
4)根据式(29),将 d-1时刻得到最优解作为d时刻问题求解的初始值。
5)根据迭代过程式(19)、式(20)、式(23)和式(24)计算并更新各个变量。
6)根据原始残差rprim和对偶残差rdual判断迭代过程是否满足精度要求。若满足,则终止迭代,将获得的最优解的第一项作为所需Wfb送入发动机,进入步骤7);若没有,进入步骤4),直至达到最大迭代次数。
7)进入采样时刻d+1,重复步骤1)。
4 仿 真
4.1 控制结构
图1为航空发动机MPC系统结构,主要包括模型预测控制器和发动机模型。MPC根据输入的参考指令ref,使用第3节所述流程求解控制量Wfb;实时非线性模型用于获得预测模型,并且通过模型的输出与真实测量值之差作为反馈校正。实时非线性模型为平衡流形展开模型[21],离线得到,其输入为 Wfb,状态量为 Nl和 Nh,输出为 Nl、Nh、P3s和T6,调度参数为发动机进口温度 T2和Nh;基于发动机进口条件和当前工作转速,以此平衡流形展开模型获得预测模型。使用部件级模型作为真实发动机,以ADMM算法对控制量进行迭代寻优。
平衡流形展开模型通过实验数据离线计算所得,其输出与发动机传感器输出存在一定的误差,使得预测模型也存在误差,为了满足控制精度的要求,需要对预测方程的输出进行修正。
在 d时刻,预测模型的输出 Nl、Nh、P3s和 T6为 ym(d),真实发动机传感器输出为 ys(d),二者的误差为 e(d)=ys(d)-ym(d),则未来时刻模型的输出可以校正为


图1 航空发动机MPC系统结构Fig.1 Aircraft engine MPC system structure
4.2 仿真结果
使用MATLAB进行仿真,MPC算法由 MATLAB实现,模拟真实发动机的部件级模型使用VC++开发,并且通过MEX方法在MATLAB中调用。
指令跟踪的目的是让发动机Nh跟随参考指令ref的变化,MPC的性能指标J的第一部分即是指令跟踪的误差(见式(1))。通过在高度 H=0 km,Ma=0,在发动机慢车以上给定发动机Nh指令,使用图1所示的控制结构,进行Nh闭环控制。
ADMM算法最大迭代次数为500次,收敛准则为εabs=1×10-5;控制器预测时域长度 np=2,权重系数λ=700。Nh响应过程、相对跟踪误差、Wfb、T6和P3s的响应过程如图2所示,数据均经过归一化处理。
图2(a)为Nh在给定指令下的响应过程,从图中可以看出,在仿真时间里,使用ADMM算法的航空发动机MPC均能使 Nh跟随指令变化。图2(b)为 Nh与 ref的相对误差,从图中可以看出,相对误差在Nh稳定时接近0,满足控制所需精度,表明ADMM算法作为在线优化算法可以满足控制器所需精度。
图2(c)为控制器计算所得的 Wfb输入曲线,图 2(d)和图 2(e)为 T6和 P3s的响应曲线。在仿真中,T6的响应速度最快,跟随 Wfb的输入变化;P3s的响应速度较 Nh快,比 T6略慢一些;Nh的响应速度最慢,这是由于转子动力学特性是所建立的部件级模型的主要动态特性,其惯性较大;由于建模中忽略了热惯性,T6紧跟Wfb变化;P3s受转子转速和燃气流量的共同作用,因此响应速度介于二者之间。观察到在仿真过程中,其在温度和压力较低区域有明显的超调。因为发动机是一个非线性系统,其动态特性随转速变化而变化,因此在仿真权重系数不变的情况下,低转速区有超调,而高转速没有。
为了验证基于ADMM算法的MPC对于发动机约束的处理能力,将T6限制适当调小,使发动机在仿真中能触及 T6限制。图3(a)为 T6将限制调小到0.87时 Nh阶跃的响应,图3(b)为 T6响应。可以看出,由于限制的存在,Nh不能跟踪给定的指令,而T6达到限制值,并且没有明显的超调。仿真表明了基于ADMM算法的MPC良好的约束处理能力,采用MPC可以取消超限保护控制回路。
为了验证ADMM算法在实时性方面的优势,使用文献[22]中所述IPM算法作为对比算法,在H=0 km,Ma=0,慢车以上转速,给定不同的阶跃幅值ΔNh和预测时域np,进行6 s的阶跃响应仿真,记录使用2种算法平均单步仿真耗时并进行对比。

图2 基于ADMM算法的航空发动机MPC响应Fig.2 Response of aircraft engine MPC based on ADMM
表1中给出了10个仿真过程中转速阶跃幅值ΔNh及预测时域设置。表2是在这些设置情况下使用IPM完成一次控制序列优化计算所需平均时间和使用ADMM所需时间。
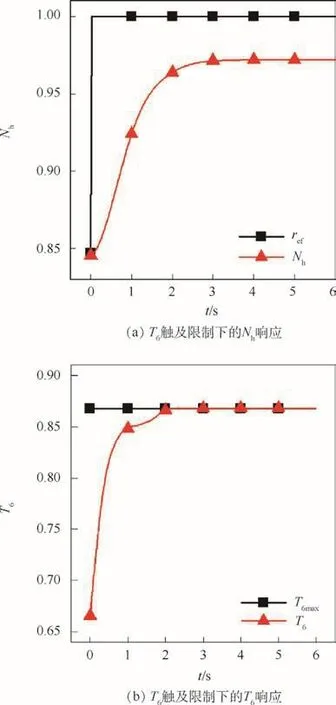
图3 T6触及限制下MPC仿真Fig.3 MPC simulation with T6 hitting limit

表1 仿真参数Tab1e 1 Simu1ation parameters
从表2中可以看出,无论ΔNh是较大还是较小的动态响应,使用ADMM的仿真耗时均低于使用IPM的仿真。这是由于ADMM算法在迭代过程中,在给定罚参数不变的情况下,KKT系数矩阵不变,因此在每次迭代过程中不必重复计算KKT矩阵的逆矩阵或分解,减少了计算量;而IPM算法在每次迭代过程中需要调整KKT矩阵,在每次迭代求解中都需要进行KKT矩阵求逆或者矩阵分解操作。假设求解需要M次迭代,矩阵分解耗时为tf,KKT系统求解回代耗时 tb,ADMM算法求解需要时间为 tf+Mtb,而 IPM算法耗时为M(tf+tb),M为求解迭代次数。
预测时域np可以表示MPC滚动优化问题的规模大小。np越大,则待求解的燃油序列维数越大,需求解的QP问题中的不等式约束矩阵和系数矩阵的维数也越大,增加了求解的计算量。
预测时域的增大可以改善航空发动机MPC的性能。图4为在H=0km,Ma=0,慢车以上转速,给定阶跃幅值 ΔNh=0.18,改变 MPC的预测时域np,得到的完成一次控制序列优化所需平均时间t与预测时域 np的关系。随着 np的增加,QP的规模增加,构成的KKT系数矩阵的维数也增加,求解 KKT方程的耗时增加。仿真结果表明,使用IPM算法的仿真耗时增加随np增加更为剧烈,而使用ADMM算法的仿真耗时增加幅度较小,证实了本文分析的合理性,表明了ADMM算法在航空发动机MPC中有比IPM更好的实时性。

表2 两种算法完成一次控制序列优化所需时间对比Tab1e 2 Time consumption comparison of two methods in finishing one-time contro1 sequence optimization

图4 控制序列优化所需平均时间与预测时域的关系Fig.4 Average time consumption for control sequence optimization vs predictive horizon
5 结 论
ADMM算法在航空发动机MPC的滚动优化中具有良好的应用前景。
1)在指令跟踪控制中,Nh与指令的相对跟踪误差均为0;表明ADMM可以满足发动机指令跟踪和约束管理的精度要求。
2)ADMM算法每次迭代过程只需计算一次矩阵分解,与IPM相比,计算量大大降低,实时性得到了很大的提高。
3)ADMM算法相对IPM有更好的计算耗时稳定性。在10组仿真测试中,预测时域从2增加到14,使用IPM算法的单次仿真耗时从10.67 ms增加到224.1 ms,扩大了20多倍;而ADMM算法从3.67 ms增加到15.53 ms,扩大不足5倍。
