智能收作业机
2019-06-25


为了解决收作业耗时费力的问题,利用乐高EV3主控、传感器、电机以及FTC部件等材料,制作智能收作业机,实现了收集、分类和统计各科作业的功能。
设计背景
对于每位学生来讲,早晨上学第一件事情就是交作业,其中最累的就是科代表。每天早晨,科代表都会早早地来到学校,收集、整理作业,统计谁交了作业谁没有交。甚罕有时候,课问也要收作业。这种收作业的方式比较耗时费力,每个同学到校时问并不同定,科代表收作业时问也会因为最晚到校的同学而不能按时上交给老师,同时统计工作也经常会山现差错。
我们常常希望有一台机器,能够自动收集作业,科学统计作业上交情况,减轻科代表的工作量和烦恼。经过与同学们、老师们充分讨论与研究,我们决定设计并制作一台智能收作业机。希望学生到校将自己的作业放到机器上时,机器可以自动识别学/和科曰,并根据科曰进行筛选,将同科曰作业收集在一起。
设计思路
要实现智能收作业的目标,首先需要机器正确识别学生和科目。我们考虑到每位学生都有学号,所以利用学号就可以正确识别学生的作业了。
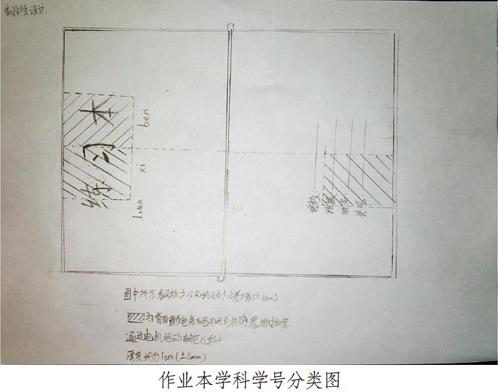
经过我们的讨论和验证,决定以颜色传感器识别色块的方式来实现学号和科目的识别。我们熟悉的乐高组块中有常见的七种颜色:红、黄、蓝、白、黑、绿、棕。识别学号我们选择两组色块来实现,如果七种颜色都用上,就有7×7-49种学号,但是在我们试验之后发现因为颜色传感器的识别度问题,绿色和蓝色容易混淆,而我们常用的作业本是棕色的,使用棕色容易造成误判。最终我们确定了用五种颜色块两两组合的方式来识别5×5=25个学号进行试验。识别科目只需要一个色块即可,我们选择了黑色和白色分别代表语文和数学两个科目。为此,我们需要制作50个检测用作业本。
在小学阶段,语文和数学是我们最主要的两科作业。我们经过观察和验证,发现简单的翻板装置就可以实现两科作业的分类功能,而且占地面积小,通过电机带动轴转动就可以实现翻板左翻和右翻的功能。
在确立了设想的可行性后,我们马上动手干了起来。通过多次试验,在发现问题后,讨论,改进,再发现问题……终于制作成功了,智能收作业机。
设计过程
这种智能收作业机的功能区主要由三部分组成:一是检测系统,由翻板、3个颜色传感器和主控组成。翻板用于搁置作业本,既坚同又实用。颜色传感器用于扫描作业本上的颜色条码,一个颜色传感器用来识别学科,两个用来识别学号,分辨出这个作业本是谁交的(每个学生对应一个颜色条码,2个光电传感器最多司以识别49组条码)。二是分类系统,由2个EV3电机、轴和翻板组成,当颜色传感器正确识别科目色块后,通过电机带动轴转动,使翻板实现向左和向右翻转将语文和数学两科作业分类。三是收纳系统,是由两个收纳筐构成。通过翻板分类的作业本自动滑落到下方收纳筐内。
1.动作原理
同学将作业本按正确方向(有箭头标记)平放在检测区上方平板上,机器识别学科和学号,电机启动,带动轴转动,使翻板向左或向右翻转将不同科目作业送入到不同的作业收纳筐中。同时主控将统计结果显示在屏幕上,上交作业的学号变成黑底,未交作业的学号没有变化,统计结果一目了然。
2.问题及解决方案
关于翻板的设计。最初的翻板就是直接用乐高部件拼出和作业本大小相同的平板。但在第一次试验过程中发现:因为材料和拼接较多等原因使翻板阻力较大,作业本在分类后不易滑动掉落到收纳筐中。我们需要让翻板更平滑,使作业本更易下落,所以在翻板上增加了一层塑料硬板。最初设计的翻板是长轴转动实现左右翻转,但在试验后发现作业本在滑落后会散开,不利于后续作业本的整理收集。将翻板设计成短轴转动,有效地解决了整理收集问题。
关于程序的改进。识别检测系统选择了颜色传感器,根据我们的设计意图,在开始编写程序时,我们对主控程序设计使用了“检测颜色→识别学号和科目→转轴(左or右)→翻板”→系列的动作命令。但在第一阶段进行多次试验后发现,作业本还没有放到平板上,颜色传感器就检测到了模糊颜色,马上进行识别,立刻转轴翻板。我们意识到,这是因为检测和识别时间的问题,怎么改进程序才能完善呢?后来增加了几个动作命令达到了这个目的,改进后的程序就成了“检测颜色→等待2秒→发出提示音→检测颜色→识别学号和科目→转轴(左or右)→翻板”,其中等待2秒,是我们经过多次试验验证过的合理放本时间。这个方案成功地使机器既快又准地扫描到了色块,准确地将作业进行分类。
结论
经过多次试验,并在校科技節上向同学们演示验证,本项目设计的“智能收作业机”能又快又好地实现两科作业的分类统计工作,能够实现减轻科代表收作业和统计作业的工作,高效地完成任务。
