基于改进自适应滤波算法的在线标定技术研究
2019-06-25王海亮石志勇李国璋宋金龙王律化
王海亮,石志勇,李国璋,宋金龙,王律化
(1.陆军工程大学石家庄校区 车辆与电气工程系,河北 石家庄 050003;2.解放军第96864部队,河南 洛阳 471000)
火箭弹的制导化改造过程中使用的惯性器件(陀螺和加速度计)精度都比较低,发射前必须对惯性器件进行标定[1-2]。因此,研究弹载捷联惯导系统的在线标定技术,对提高火箭弹的打击精度具有重大意义[3-4]。
研究表明,采用不同的滤波算法直接决定了惯导系统在线标定的效果。目前,在惯导系统在线标定过程中一般都是采用标准卡尔曼滤波算法[5-6],但标准卡尔曼滤波算法必须预先明确系统的噪声统计特性才能达到理想估计效果,而由于火箭炮的工作环境及运动特性复杂多变,因此,实际工作中弹载惯性器件的噪声统计特性不可能精确已知,这种情况下采用标准卡尔曼滤波算法必然会影响标定的效果甚至会导致滤波发散而无法完成在线标定。为解决这一问题,很多学者开始研究一些自适应滤波算法,力求能够实时估计和修正系统噪声统计特性,优化滤波效果[7-8]。
目前对自适应滤波算法的研究主要集中在Sage-Husa自适应滤波和Salychev O自适应滤波。北京航空航天大学的王永刚等将改进的Sage-Husa滤波用在GPS/INS组合导航中,但只对状态噪声协方差阵Q进行了实时估计[9];南京航空航天大学的华冰等将Salychev O联邦自适应滤波算法应用到SINS/北斗/星敏感器组合导航中,但其将R阵设为常阵,只对Q阵进行了自适应估计[10];东南大学的梁松等将简化的Sage-Husa自适应滤波算法用在捷联组合导航系统中,但也是只对R阵进行了实时估计[11]。通过之前的研究表明,以上两种滤波均不能同时估计系统状态噪声和量测噪声协方差阵,这在很大程度上影响了滤波的效果,不利于实际应用[12-14]。针对以上问题,笔者在Salychev O自适应滤波算法的基础上提出一种改进自适应滤波算法,该算法可实时估计和修正系统状态噪声及量测噪声协方差阵,而且通过在量测噪声协方差阵的计算过程中加入阈值因子,可有效抑制较大量测误差对滤波造成的影响,极大提高了滤波的精度和稳定性。通过建立惯性器件在线标定误差模型、滤波模型及补偿模型,采用改进自适应滤波算法,利用仿真试验完成了在系统噪声统计特性不准确的情况下对惯性器件误差参数的实时标定,具有很强的实际应用价值。
1 在线标定模型设计
1.1 在线标定滤波模型
参照文献[15]建立陀螺仪和加速度计的误差模型。对弹载惯性器件误差进行在线标定时,以车载主惯导输出的速度和姿态信息作为匹配量,建立系统误差的状态空间模型,得到系统的状态方程为
(1)
其中各子矩阵定义参照文献[16];W表示系统噪声矩阵。
系统的量测方程为:
Z=HX+V,
(2)
1.2 在线标定补偿模型
当在线标定完成后,即可在之后的导航过程中,利用各误差参数的标定值对捷联惯导系统进行误差补偿,以提高导航的效果。具体算法如下:
(3)
补偿后,陀螺和加速度计的输出为:
(4)
2 改进自适应滤波算法
Salychev O自适应滤波算法[10]就是在标准卡尔曼滤波算法的基础上能够实时估计出状态噪声协方差阵Q.与标准卡尔曼滤波算法相比,Salychev O自适应滤波算法一定程度上优化了滤波的效果,但是量测噪声协方差阵R模型参数不准确,必然还是会影响滤波收敛的效果。因此,笔者在Salychev O自适应滤波算法的基础上设计了一种对Q、R阵都能够实时调整和估计的改进自适应滤波算法,并在R阵的估计过程中加入阈值因子,能够有效抑制测量误差突变对滤波造成的影响,提高了滤波的稳定性与收敛精度。
2.1 噪声协方差矩阵的估计
根据文献[10]中式(4)、(5)可将新息序列协方差矩阵写成:
(5)


(6)
(7)
将Rk移项得:
(8)
2.2 阈值因子

(9)
由于本文观测噪声方差阵为6阶矩阵,所以加权阵设为:
Dk=diag(ηk,1ηk,2ηk,3ηk,4ηk,5ηk,6).
(10)
如果判断出观测值中含有较大误差,则观测噪声协方差阵应进行如下更新:
(11)
在新息判断时,只有检测出观测值中出现较大误差,才会通过计算加权阵Dk调节观测噪声协方差阵Rk,进而修正状态增益阵Kk,有效抑制较大的观测误差给滤波造成的影响,提高标定的效果。式(11)中,阈值因子tk,i的取值必须根据实际情况确定,取值太小,会导致滤波过程对误差过于敏感而影响滤波效果;取值太大,则无法达到判断含有较大误差观测值的目的,无法有效调整Rk阵,会影响标定的精度和实时性。
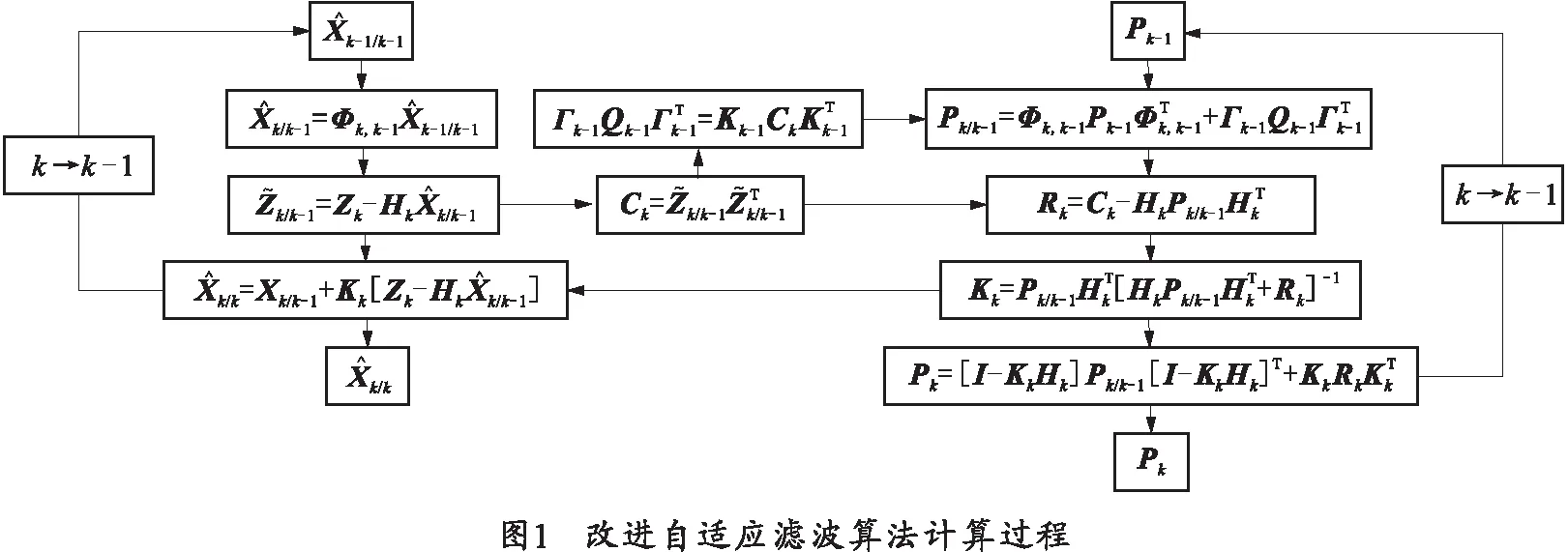
2.3 改进自适应滤波算法计算过程
提出的改进自适应滤波算法解决了Salychev O自适应滤波中无法实时估计量测噪声协方差阵R的问题,而且引入阈值因子对R阵进行实时检测以抑制较大的观测误差给滤波造成的影响,提高了惯性器件误差标定的效果。算法具体的计算过程如图1所示。
3 仿真校验
为了验证笔者提出的基于改进自适应滤波的弹载捷联惯导系统在线标定方案的可行性,对比噪声统计特性不确定的情况下,分别采用改进自适应滤波与标准卡尔曼滤波及Salychev O自适应滤波对惯性器件误差进行在线标定。
3.1 参数设置
根据文献[16]提出的在线标定路径设计原则,设计合适的机动路径激励误差参数。设初始纬度为30°,经度为118°,杆臂r取[2 3 2]m,弹载子惯导安装误差角三轴向均设置为10′,状态变量X初值都设为0.设加速度计零偏为0.05 mg,刻度系数误差为1×10-3;陀螺常值漂移为0.24 μrad/s,刻度系数误差为1×10-3.
系统噪声设置如表1所示,其中,

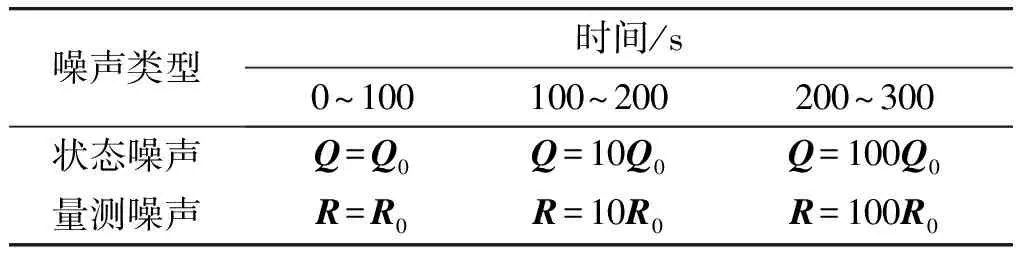
表1 系统噪声设置
3.2 仿真结果分析
根据设计的机动路径对弹载捷联惯导进行在线标定,在噪声统计特性不确定的情况下得到的各误差参数估计结果,如图2、3所示,其中直线为预先设定值,曲线为滤波估计值(虚曲线为标准卡尔曼滤波估计值,点划曲线为Salychev O自适应滤波估计值,实曲线为改进自适应滤波估计值)。
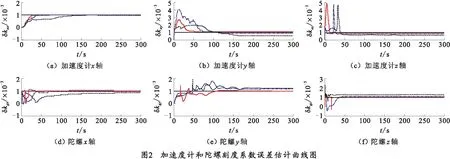
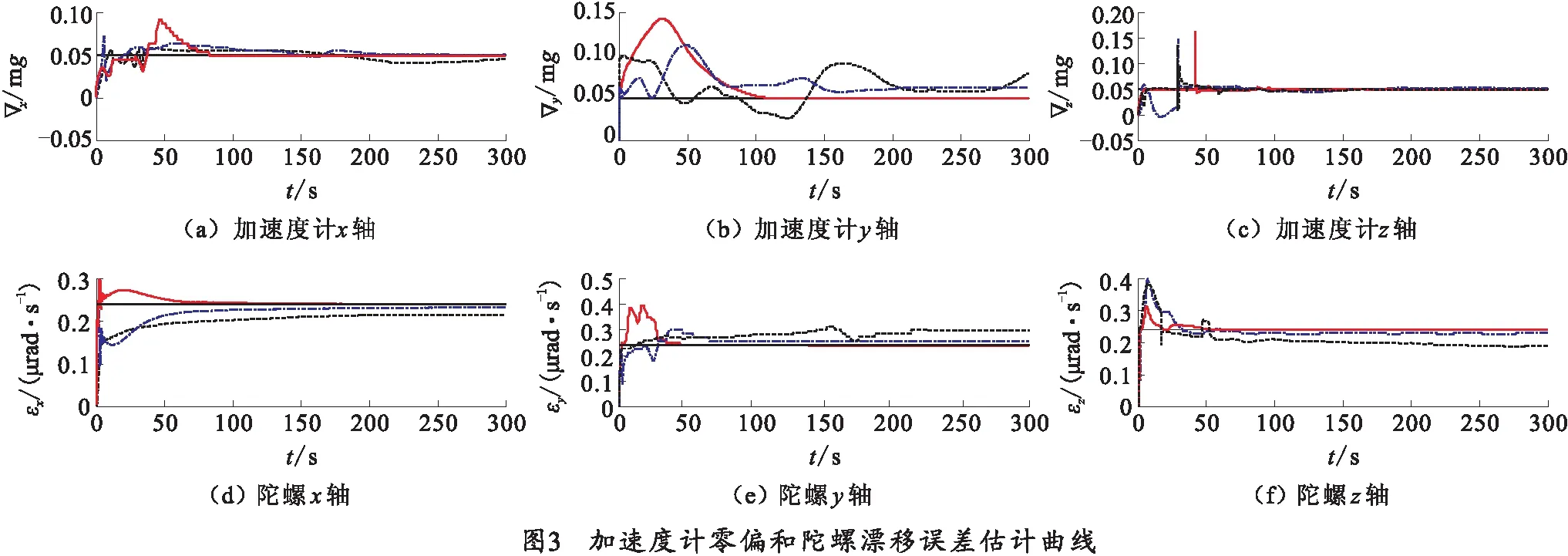
通过以上仿真结果可以看出,采用改进自适应滤波算法时,各误差参数在100 s内都能够收敛,且收敛精度比较高;而采用标准卡尔曼滤波及Salychev O自适应滤波时,收敛时间都有不同程度延长,且收敛精度较低,尤其是采用标准卡尔曼滤波算法时,y轴加速度计的零偏误差还出现了轻微的发散。因此可得,在噪声统计特性不确定时,采用笔者提出的改进自适应滤波算法进行在线标定的精度普遍优于标准卡尔曼滤波及Salychev O自适应滤波。利用3种标定结果对器件误差进行补偿后,得到系统的部分导航误差统计结果如表2所示,采用改进自适应滤波时的导航误差相较于采用标准卡尔曼滤波及Salychev O自适应滤波时明显较小,有效提高了导航精度。

表2 标定补偿后部分导航误差
4 结束语
笔者提出一种改进自适应滤波算法并用于对弹载捷联惯导系统的在线标定。该算法可实时估计系统状态噪声及量测噪声协方差阵,且在量测噪声协方差阵估计过程中加入了阈值因子,有效抑制了恶劣条件下较大量测误差对滤波的影响。通过建立弹载捷联惯性器件误差模型,设计包含21维状态变量的高阶滤波模型及误差补偿模型,并基于改进自适应滤波算法对弹载捷联惯导系统进行了在线标定。通过仿真试验表明,该算法能够在系统噪声统计特性未知的情况下完成滤波估计,相较于标准卡尔曼滤波及Salychev O自适应滤波具有明显优势,采用该算法完成惯性器件误差在线标定效果更优,可有效提高弹载捷联惯导系统的导航精度。