反应堆压力容器六轴机器人检测系统的研究
2019-06-24魏文斌汪千强
魏文斌,汪千强
(1.山东核电有限公司,山东 265116;2.江西工程学院,江西 338029)
0 引言
反应堆压力容器和压力容器顶盖是核电站的重要部件,是作为防止回路放射性物质泄漏的屏障之一,承受着回路冷却剂的高温、高压和高放射性的作用,压力容器的密封面上通常会存留一些粉尘和划痕,会影响压力容器的密封性能,在核电站役前和在役期间均需要进行必要的无损检验。由于工况的特殊性,人员无法进入压力容器内部或顶盖下方进行检查,同时出于无损检测重复性及稳定性的需要,针对压力容器及顶盖的检查,设计了一种在末端携带检测探头的六轴机械手,对反应堆压力容器和压力容器顶盖进行周期性自动检查。
该机械手具有六个自由度,分别是沿压力容器圆周方向的运动、轴向运动以及各个关节的旋转运动。设计为长度可伸展以适应不同直径的容器检测。

图1 机械手示意图

图2 机械手末端携带不同类型扫查器检测不同区域的状态图
1 机器人控制系统的设计
自主化控制系统主要用于六轴机械手的运动控制,以满足反应堆压力容器及顶盖的检测需要。该系统分为三大模块:上位机系统、下位机系统、软硬件平台接口系统[1~3]。
软件运行构架如图3所示,上位机系统主要根据键盘鼠标的输入,指定机械手要达到的位置,通过运动学分析模块把各个关节的控制信号传给机械手控制器,以此来控制机械手运动,同时通过仿真模拟模块直接输入机械各轴的位姿来模拟机械手的运动状态。六轴机械手在指定空间范围内的连续动作以实现各种扫查功能,上位机用户界面提供实时状态反馈和机械手三维姿态;下位机系统通过采集传感器信号,传输给上位机系统,经数据处理后得到输出信号,由驱动电机带动整个机械手。接口系统将机械手各个电机的位姿信息提供给运动控制模块和仿真模块,仿真模块处理信息后将机械手的三维位姿情况显示在人机交互界面[4~6]。

图3 控制系统构成示意图
1.1 机器人上位机系统设计
如图4所示,上位机系统框架分为三个部分:机器人执行与仿真环境生成子系统、机器人执行业务逻辑子系统和基于ROBCAD的人机交互界面子系统。一般ROBCAD采用HP UX 10.10操作系统,软件控制平台为ROBCAD7.1,系统运行界面是通过定制过的ROBCAD的用户界面。但本系统中上位机软件控制部分是基于ROBCAD平台集成的,将现有的应用移植到Windows环境中,复制现有的各种业务逻辑,并建立和下位机的通讯,对现有的设备控制进行集成[7]。

图4 上位机系统框架图
1.1.1 机器人执行与仿真环境生成子系统
1)设备几何模型系统
包括核电设备和机器人几何模型,导入为ROBCAD接受的格式IGES,STEP格式。建立几何模型转换器,用来转换通用的几何模型,设置模型的质量属性、关节、材质等特征。
2)轨迹点生成系统
利用ROBCAD环境,在ROSE API环境下根据路径规划算法动态生成机器人需要执行的轨迹点。其中路径规划(path planning)算法是通过ROBCAD找到无干涉,并能完成任务的路径点。生成一系列运动连续的参考点,以发送到控制器驱动机器人运动。即通过路径规划找到一系列要经过的路径点,这些点只是空间中的一些位置,或者关节角度,通过ROBCAD轨迹规划确定怎么走,走多快,它需要赋予这条路径以时间信息。本项目对于路径规划,采用RRT、PRM以及他们的各种改进算法。轨迹规划采用ROBCAD的S型规划等优化算法,保证时间最优,能量最小等方法规划求解。

表1 机器人执行业务逻辑子系统
1.1.2 人机交互界面子系统
ROBCAD软件在Unix环境下开发的,尽管有windows版本,ROBCAD系统仍然是Unix的Motif界面,在Exceed虚拟机上运行。基于用户接口语言ROBULL,采用OSF-Motif标准。
对ROBUIL提供的界面对象以及回调函数工具箱,用户通过界面对象可以设计自定义的应用程序。
1.2 软硬件接口平台设计
如图5所示,机器人执行命令接口分为4部分:
1)控制指令集定义与生成:采用标准机器人语言来定义,以满足扩展,包括运动、信号处理、流程控制、数学运算、逻辑运算、文件管理、数据编辑等指令;
2)通信协议:采用标准TCP/IP接口来实现;
3)控制指令生成:根据轨迹路径、机器人运动学对轨迹进行离散,生成控制指令集;
4)生成的指令校验:根据设置的校验码进行指令校验,以防功能性故障。

图5 机器人执行命令接口
如图6所示,机器人检测监控接口分为4部分:
1)控制原始目标定义:对待检测目标进行空间建模,转换到实际坐标系进行融合。并绘制目标预计轨迹和控制精度;
2)通信协议:标准TCP/IP协议;
3)机器人位姿读取同步器:基于固定帧,实现定间隔对机器人装置的各种位姿信号进行同步扫描,满足实时可控数据同步;
4)状态比对:根据读取的信息,通过ROBCAD中建立的仿真模型实时复演比对,实现误差显示,可以完成实时精度补偿。
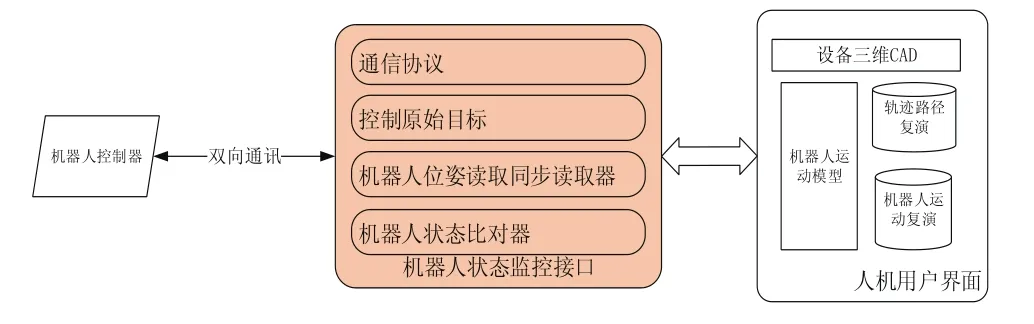
图6 机器人检测监控接口
2 六轴机器人笛卡尔路径规划
为实现对六轴机器人的运动控制系统的监测,实现机器人的运动轨迹按预设轨迹动作,需要对机器人进行末端直线和圆弧路径规划[8,9]。为保证检测质量,机器人的末端除了沿轨迹线运动外,还需确保检测头始终垂直于当前点的法线方向。为此需要对机器人进行六自由度路径规划,确保机器人的位置和姿态满足任务需求。
2.1 位置规划
2.1.1 直线路径规划
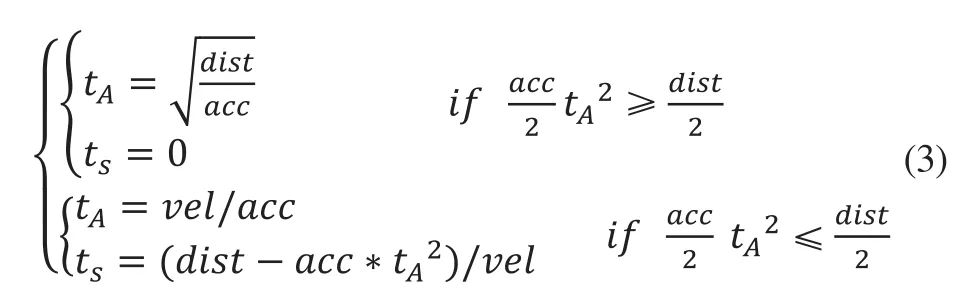
为保证机械臂末端运动的平滑性,机械臂末端按图7所示的梯形速度曲线运动。

图7 梯形速度曲线
1)确定加速时间tA:

式中,vel是预定的末端速度,acc是预定的末端加速度。
2)求插补直线长度:
如果起始点和终止点分别用Ps和Pf表示,则两点间的距离为:

(1)修订速度轨迹曲线:
(2)确定每次运动的步长
采用定时插补,插补周期为T,则插补次数为:

根据图6中的梯形速度曲线,可以计算出第k次插补时走过的位移:

则下一步的位置为:

2.1.2 圆弧路径规划
给定圆弧起始点Ps、终止点Pf以及与Ps和Pf不共线的路经点Pm,可以确定空间上的一条圆弧。以圆弧的圆心为原点,圆心指向起始点Pf为X轴,圆弧所在平面的法线为Z轴建立坐标系O*-X*Y*Z*,如图8所示。

图8 圆弧路径规划
将Ps、Pf和Pm转换到坐标系O*-X*Y*Z*中,得到平面上的点Ps*、Pf*和Pm*,求出此时的圆心角,如图9所示。

图9 平面上的圆弧
则圆心角θ为:

圆心角θ按图7中的梯形速度曲线变化,根据上面式(6)计算第k次插补时的圆心角,进而可得到坐标系O*-X*Y*Z*中机器人末端的坐标。将此坐标转换到世界坐标系中,得到机械臂末端在世界坐标系中的坐标:

2.2 姿态规划
采用单位四元数来表征机器人末端姿态并进行姿态的规划。单位四元数的形式为,其中:


由式(9)可以很方便地求出转动角度和转轴方向,然后就可以根据上面式(1)进行插补计算。
3 系统应用
系统已经在山东海阳核电站的“核电站反应容器机器人检测”的项目上得到了应用。系统最大扫描速度为120mm/S,机械手末端可以驱动15KG的端部效应器,负载为16kg,绝对位置重复精度为±0.95mm,累计位置精度±5.5mm,可以根据法规及实际检查需要,通过相应参数选择和设定实现压力容器各检查部位的扫查路径生成,并可实现扫查路径的单步、连续、中断续检等过程控制。核电站的应用,充分通过实践验证了该系统的可靠性及实用性。

图10 反应容器内机械手模型

图11 系统扫描轨迹生成
4 结束语
本文综合考虑核电站反应堆压力容器检测机器人在机械部分、电气控制和探测仪器等诸多因素,设计实现了反应堆压力容器六轴机器人检测控制系统。该检测控制系统的基本功能、可靠性、安全性和技术指标已满足核电站工程应用现场的实际检测要求,提高了反应堆压力容器无损检测的重复性以及稳定性,达到了良好的效果,由此可见,该系统可以进一步的适应于各种特殊的核环境,有较大的普适性跟推广价值。
