某型导弹系统机动射击时超调问题分析及控制算法优化*
2019-06-24张国伟张太恒何明辉
张国伟,王 勇,张太恒,何明辉
(1 吉林江机特种工业有限公司, 吉林吉林 132021;2 驻524厂军事代表室, 吉林吉林 132021)
0 引言
某型导弹系统(以下简称导弹系统)以性价比高、操作方便受到部队好评。随着部队实战化要求,对机动目标的射击使用越来越多。在使用过程中逐步发现了一些问题,射击机动目标相对射击固定目标难度较大,对射手要求较高,操控不当容易导致射击失败。
1 导弹系统控制概述
导弹系统由地面控制设备(简称地控)、发射装置和导弹等构成。该系统采用三点法导引体制,半自动控制,目视瞄准,有线传输指令。在攻击机动目标时,射手转动地控,可使瞄准线实时跟踪目标。地控含能够测量目标运动角速率的编码装置,根据目标运动的角速率计算机动射击补偿指令,使导弹快速沿瞄准线飞行,直至命中目标。根据相对运动理论,导弹在机动过程中,由瞄准线转动所引起的偏航导入段加速度包括相对加速度、牵连加速度和科氏加速度。当瞄准线转动较为均匀时,牵连加速度也可以忽略[1]。当出现目标从高速运动状态到突然停止的情况时,导弹由于惯性将产生超调。超调量小,则可能绕过目标而攻击失败。超调量大,导弹飞出地控的测角视场而失控掉弹。
导弹系统是一个闭环系统。地控控制导弹飞行的原理为:获取导弹偏离瞄准线的角偏差,计算出偏离瞄准线的距离,即线偏差。由线偏差通过PID(比例-积分-微分)计算出控制指令系数,以导弹陀螺信号为基准将控制指令系数形成控制导弹舵机偏摆的控制指令。PID控制框图见图1。

图1 PID控制框图
图中:y(t)为系统的输出;n(t)为给定值;e(t)为控制的输入,即偏差:e(t)=n(t)-y(t),被控量与给定值的偏差。
PID控制的微分方程为:
(1)
式中:u(t)为控制的输出;Kp为比例系数;Ti为积分时间常数;Td为微分时间常数[2]。
PID传递函数为:
(2)
式中:Kp为比例系数;Ti为积分时间常数;τ为微分时间常数。
PID控制是综合了PI和PD控制长处,并消除其短处。积分控制的作用:消除稳态误差,但积分作用太强会使系统超调加大,甚至使系统出现振荡。微分控制作用:减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,改善系统的动态性能[3]。
2 减少超调的技术方案
由导弹PID控制系统的原理可知,调整积分控制和微分控制可以影响导弹在机动射击时的超调量。图2示例,瞄准线以2°/s跟踪角速率自右向左控制导弹机动飞行,跟踪范围为10°。下面分别就控制参数调整进行论述。
2.1 减小控制参数中的积分系数
导弹作机动飞行,一般情况下会滞后瞄准线,即存在稳态误差。存在稳态误差,积分将起作用消除稳态误差。积分消除稳态误差的过程即导弹靠近瞄准线的过程,然后导弹将会冲过瞄准线继续飞行,在控制系统的作用下会缓慢再次回归瞄准线。积分越大,导弹过冲越大,即超调越大,导弹再次回归瞄准线的时间越长。所以,在机动射击时通过减小积分可减小导弹超调。具体实践中,控制系统判断导弹处于机动时,控制软件将减小积分系数,减小的幅值可与瞄准线的转动速率成一定比例。

图3 减小积分前
图4 减小积分后
图4的积分系数为图3的60%。由图3和图4可以看出,减小积分后超调减小。
2.2 增大控制参数中的微分系数
瞄准线停止转动后,导弹向瞄准线回归,轨迹存在变化,微分将起作用。适当增大微分系数,可减小导弹过冲,使导弹平稳向瞄准线回归。

图5 增大微分前
图6 增大微分后
图6的微分系数为图5的1.5倍。由图5、图6看出增大微分后,超调减小。
要注意,微分过大,改善了超调,但是也会出现明显的高频振荡。微分的另一个问题是微分对噪声很敏感,即使来自接线或者由于分辨率所限引入的很小的噪声都可能致使微分失效,在大多数情况下,微分之后需要跟随一个低通滤波器,以减少噪声成分[4]。
2.3 增加控制系统的刹车指令
调整积分、微分能够改善导弹超调,但是积分过小,短时间不能消除静态偏差,微分过大又会引起弹道振荡,只调整这两个参数具有局限性,可以引入“刹车指令”的概念,作用更明显。
刹车指令的主要思路是:当正常跟踪机动目标时,控制系统可获取瞄准线转动角速率和转动的角度,输出机动补偿指令,以使导弹快速跟随瞄准线飞行。当瞄准线转动减速时,引入两次目标值的差值作为前馈控制,并引入前馈系数,控制系统输出与原方向相反的机动飞行补偿指令[5]。补偿指令的大小、持续时间可根据转动的角度确定。刹车指令的软件流程见图7。仿真效果见图8、图9。
图7 刹车指令的软件流程
仿真中,当瞄准线转动角度大于3°且转动减速,输出与角度相关的反向控制指令,并在停止转动时持续输出0.8 s。由图8、图9对比,有刹车指令时超调明显减小,说明刹车指令有效。

图8 无刹车指令

图9 有刹车指令
2.4 导弹系统机动射击验证
同时采用调整控制参数和增加刹车指令的方式进行靶场机动射击试验。调整前后的导弹轨迹见图10、图11。
图10 调整前机动射击飞行试验曲线
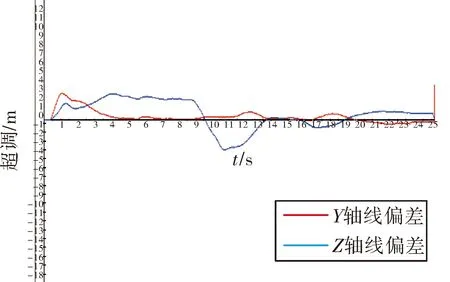
图11 调整后机动射击飞行试验曲线
图10中,导弹侧向的最大超调量为5.5 m,在约16 s时回归瞄准线。图11中,导弹侧向的最大超调量约为3.0 m,在约13 s回归瞄准线。通过对比,图11的超调量较图10小,导弹回归瞄准线的时间早,更有利于命中目标。
3 结论
文中针对导弹机动射击的超调问题,提出了调整控制参数和增加刹车指令的解决方法,这几种解决方法视不同情况可分别采用,也可同时采用。同时采用以上方法进行数字仿真和飞行试验,结果表明:导弹超调减小,能够提高命中率。该技术已应用在武器系统的改进型及后续其他项目中,取得了较好效果。
