基于仪表检定参数的测量值修正和校准
2019-06-22刘传龙李四海
刘传龙 李四海
(十堰市产品质量监督检验所,湖北十堰 442000)
0 引言
所有测量仪表、传感器(变送器)和计量器具的测量结果数据都不同程度的存在系统误差和随机误差,其中随机误差几乎是不可改变的,但系统误差则可通过代数运算的方法加以修正和校准。当系统误差的存在影响到科学测试应用的基本技术要求时,则有必要对测量结果数据的系统误差进行修正和校准。测量结果数据的修正可以由测量仪表(器具)使用者识别并手工修正;而测量结果数据的校准则复杂一些:早期完全由测量仪表(器具)使用者以高等级仪表检定数据为参考值进行手工计算校准。目前随着仪表智能化技术的发展提高,也有测量仪表制造者以提供检定数据输入端口,仅让使用者参与数据输入,然后后由仪表内部程序自动完成的方式进行校准。
1 仪表检定数据的修正参数
1.1 修正值、修正因子的定义
按照JJF1001-2011《通用计量术语及定义》中5.7节-注2、3条定义:(1)修正值是用代数方法与未修正测量结果相加,以补偿其系统误差的值,修正值等于负的系统误差的估计值;(2)修正因子是为补偿系统误差,与未修正测量结果相乘的数字因子。
1.2 修正值、修正因子的作用
(1)消除仪器设备的固有系统误差采用修正值修正测量值;(2)消除与测量值(量程)比例相关的系统误差采用修正因子修正测量值。
1.3 修正值、修正因子的简单识别方法
(1)识别修正值、修正因子的数据来源:由仪器或设备的检定(校准)证书提供的一组“示值误差”或者“示值相对误差”数据。

(3)实际的修正值δ识别中,δ与检定证书中“示值误差”相关。可用“示值误差均值”作为“系统误差的估计值”,即:

它是一个有符号(可正可负)数字因数。按公式(1)识别δ具有最佳修正效果;但为避免繁琐计算,δ可简化选取示值误差(X-X)的“中间、中位值和零点误差值”,也有不错的修正效果。


(4)实际的修正因子φ识别中,φ与检定证书中“示值相对误差”相关。φ一般取“1与合适的示值相对误差q之差”,所谓“合适”,可考虑几个选项:(a)一致性较好的示值相对误差;(b)最小的示值相对误差;(c)最大测量点的示值相对误差。
如果已识别确定某个q值来关联修正因子φ,根据相对示值误差的定义,自然考虑修正运算式为:

表1 检定结果数据
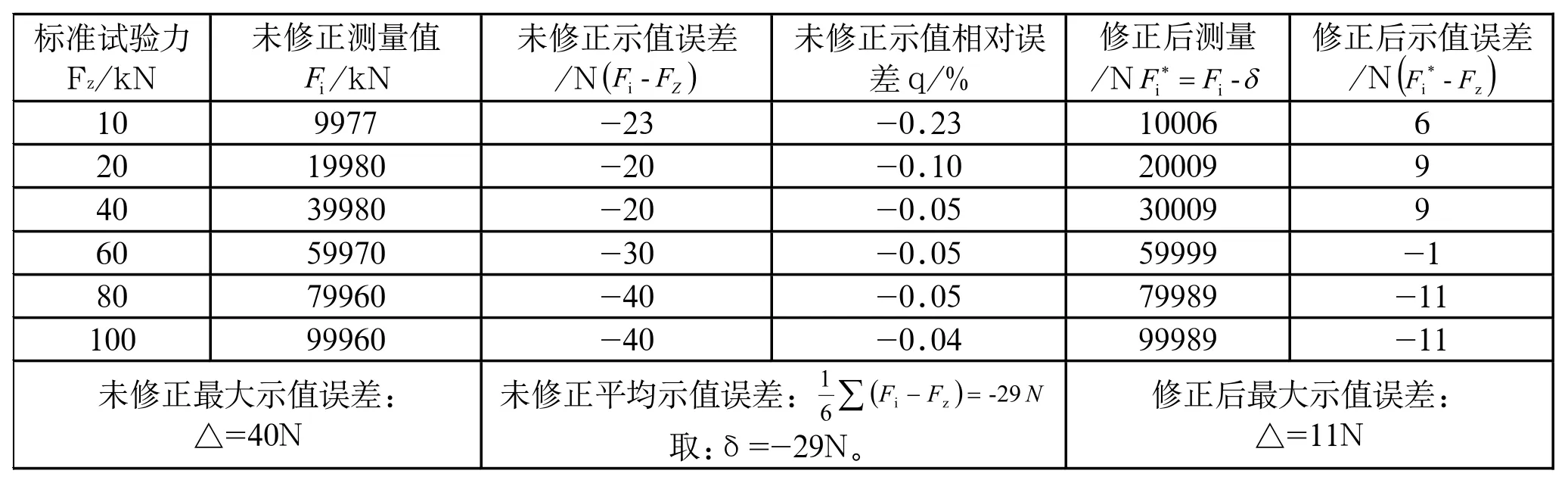
表2 型号WSM-100拉压力试验机检定证书数据进行修正值δ识别/修正

表3 型号WSM-100拉压力试验机检定证书数据进行修正因子φ识别/修正


由于q值可正可负,且q的绝对值远小于1,所以1-q是一个接近于1(大于1或者小于1)的数字因子。修正因子使用(修正)方法:修正后测量值X*等于未修正测量值X乘以修正因子φ,即:

2 单测量点检定数据的修正值δ识别
指标准砝码类(或某些刻度类量器),检定(校准)证书中已明确标明一个有符号的参数为“示值误差”:此种情形可直接将这个示值误差直接识别为修正值δ。具体修正公式:修正后测量值X*=未修正测量值X-δ。
实例:以我单位编号SM036:LT101电子天平用500g标准砝码2018年检定结果数据见表1:
实际分度值/d0.1g;检定分度值/e1g;最大称量/g500g。
修正值识别为:δ=+0.1g
3 多测量点(一个量程范围)权威资质机构检定数据的修正值δ识别原理
仪器或设备检定(校准)证书提供了一组(多个测量点)数据,而且附有一组示值误差(或相对示值误差)参数值。修正参数识别时,仪表设备多点检定数据通常在“标准值(横坐标)——测量值(纵坐标)坐标系”中描述,如图1所示。

图1 多测量点条件下修正值δ识别示图意

图2 多测量点条件下一般测量数据分布状况
4 多点测量数据的修正值/修正因子识别实例
(1)以我单位检定证书编号:20170808247,型号WSM-100拉压力试验机检定证书数据进行修正值δ识别/修正见表2。
(2)同样以我单位检定证书编号:20170808247,型号WSM-100拉压力试验机检定证书数据进行修正因子φ识别/修正实例见表3。
5 修正值δ和修正因子φ识别的通用最优方法
(1)考虑检定数据在“标准值(横坐标)——测量值(纵坐标)”坐标系中的直线模型表达。如图2所示。
图2中假定检定数据的修正前最佳拟合直线方程为:X=ΨX+δ,图中数据为一般情形:即示值误差均值为正,最佳拟合直线斜率大于1。有先验的算法(最小二乘法)可知:拟合直线的两个参数分别按下述公式计算:

图3 多测量点条件下修正值修正过程示意图

修正值δ与为拟合直线的截距相等。
修正因子φ为拟合直线斜率Ψ的倒数:

6 参考第四节中描述的过程,分两步对测量值进行修正
第一步,先将拟合直线在纵轴的截距识别为修正值δ是合理的,将每个测量值减去修正值δ,即:

如图3所示:测量数据点全体向下移动距离δ,最大示值误差△大幅度降低。

如图4所示:修正后拟合直线与理想测量直线重合,最大示值误差△进一步降低。
(1)很明显,如果使用修正值δ、修正因子φ同时修正的通用方法,需要比较繁琐的计算过程,而且按最小二乘法拟合直线求得的修正参数δ和φ(φ=1/Ψ)是最佳修正参数,它一般适用于带有计算机数据采样的传感器校准,测量设备制造商把这种修正过程编制为专门的传感器标定程序,设备使用者定期依据检定部门现场检定数据,直接启动标定程序界面,录入检定数据后,计算机自动进行计算和修正,完成修正校准后可以极大地改善传感器测量精度。作为检定部门一般不推荐使用,而使用近似的和单一的(修正值δ、修正因子φ选其一)识别方法已可满足要求。
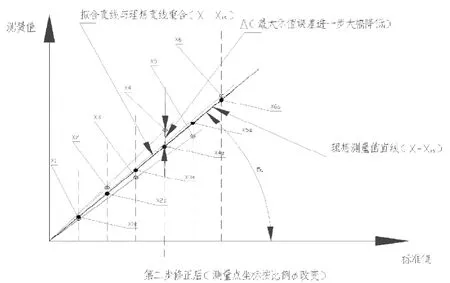
图4 多测量点条件下修正因子修正过程示意图
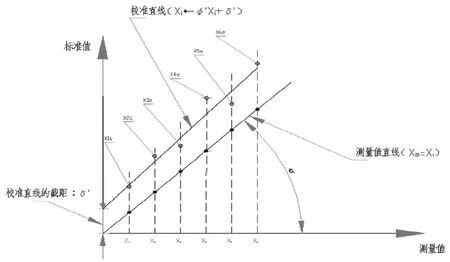
图5 将测量值校准到校准直线上
(2)有的测量仪器带有“零点校正”功能,实际上就是把空载测量值(零点示值误差)识别为修正值δ,相当于一种由使用者操作的仪器自带修正值识别功能。
(3)对于多测量点检定数据,如果仅进行修正值δ识别,也就是拟合直线模型为:X=X+δ,此时根据公式(5)、(6),由于Ψ=1,得:



图6 折线校准法示意图
(4)如果仅进行修正因子φ识别,也就是拟合直线模型为:X=φX,则相当于本节所述通用最优方法中另一种将修正值δ预设为“0”的特例。
7 仪器、传感器(变送器)和计量器具的校准方法
仪器、传感器(变送器)和计量器具检定数据校准与修正的区别:校准参数在“测量值(横坐标)——标准值(纵坐标)”坐标系下表达,与修正参数表达坐标系的自变量、因变量定义则相反。
7.1 直线校准法的校准参数



(3)按上条目标函数要求,可以得到的推导结果是:

7.2 折线校准(或称分段校准)法的校准参数
(1)当仪表仪器测量值与标准值之间的示值误差在某些量程或测量点比较大,但重复性较好时有必要选择折线校准法。把每两个相邻标准值测量点之间连接为(n-1)段折线,将每段折线都当成校准直线使用。如图6所示。

校正值:


8 结语
(1)采用近似识别方法时,一般以“示值误差”(X-X)为依据识别修正值δ;以“示值相对误差”{q=(X-X)/X}为依据识别修正因子φ。(2)在从检定(校准)证书中识别选取“示值误差”和“示值相对误差”时,注意不要丢失正负号。(3)仪器设备检定后等级已满足使用要求的前提下,修正值δ和修正因子φ都可以不用识别。(4)采用修正值/修正因子均可以有效地缩小最大示值误差△,或者说可以改善测量不确定度。(5)修正因子φ的选择需要慎重,一般应选择除零外最小或者次小的示值相对误差q来计算φ,最大测量点的示值相对误差q通常满足该条件;识别最大测量点示值相对误差为修正因子的方法有时又称“满量程校正”法。(6)采用最优识别方法时,用最小二乘法拟合直线方程:X=ΨX+δ,截距δ与修正值等价相关,斜率Ψ的倒数与修正因子φ等价相关。(7)实际应用中,修正值δ和修正因子φ两者选其一即可,而且一般采用近似识别方法。如果修正值δ和修正因子φ同时采用,一般分两步进行,先按公式:X*=X-δ完成修正值δ修正,再按公式:X*=X*×φ完成修正因子φ修正。(8)校准参数校准值δ'和校准因子φ'对测量点数据进行校准可以采用公式:X*=φ'X+δ一步完成校准。(9)最优修正参数与最优校准参数有类似的表达形式,它们之间差异的原因来自选择不同的拟合直线模型以及不同的表达坐标系,可以说它们是一个问题的两种表达形式。

