北斗卫星导航系统SISURE初步评估∗
2019-06-20谢慧宋淑丽焦国强黄超陈钦明
谢慧 宋淑丽 焦国强 黄超 陈钦明
(1 中国科学院上海天文台上海200030)
(2 中国科学院大学北京100049)
1 引言
北斗卫星导航系统(Beidou Navigation Satellite System,BDS)于2012年完成“5 GEO (Geostationary Earth Orbit)+5 IGSO (Inclined GeoSynchronous Orbit)+4 MEO(Medium Earth Orbit)”的区域星座结构建设,服务范围覆盖亚太区域,预计到2020年前后,完成35颗星组网,为全球提供服务[1−4].2017年11月5日第1和第2颗北斗三号(BD3)系统卫星发射升空,标志着中国北斗全球卫星导航系统正式步入全球组网阶段.2018年12月27日,通过1 yr 19颗星的密集发射,北斗三号基本系统建成,北斗系统服务范围由区域扩展为全球,正式迈入全球时代.与北斗二号(BD2)相比,北斗三号性能更优,在信号设计方面,提供多个频点的导航信号,能够通过多频信号组合使用等方式提高服务精度,有利于全球导航卫星系统(GNSS)系统间兼容与互操作[5−7]; 在卫星载荷方面,采用了天稳定度达到10−14量级的铷原子钟和天稳定度达到10−15量级的氢原子钟[8],进一步提高了卫星性能与寿命.
近年来,随着人们对导航系统的需求不断增加,北斗卫星导航系统也逐渐渗透进我们的日常生活中.从应用角度来看,用户对所使用系统的服务性能有一个较高的标准;从系统运行角度来讲,系统服务性能的表现和长期趋势分析需要有性能评估结果来支撑; 从科研角度来讲,广大学者开展北斗系统研究最基本的就是需要对其服务性能进行评估.因此,开展北斗系统公开服务性能评估方法研究尤为重要.评价导航系统服务性能的基本参数有用户测距误差、用户测距率误差、用户测距加速度误差、空间信号连续性、空间信号可用性、协调世界时偏移误差、定位精度、测速精度、授时精度、位置精度衰减因子(Position Dilution of Precision,PDOP)可用性、定位服务可用性等.导航定位精度和卫星系统完好性监测的关键因素之一是导航卫星的空间信号性能[9].导航系统空间信号用户测距误差(Signal in Space User Ranging Error,URE)是导航卫星位置和钟差的实际值与采用广播星历得出的预测值之差,投影到卫星-用户视线上的等效距离误差[10],它主要反映广播星历轨道及钟差精度,并最终影响实时导航用户定位精度,是评估导航系统空间信号和其服务性能的主要参数.
本文以上海天文台iGMAS (International GNSS Monitoring & Assessment System)分析中心发布的精密轨道、钟差产品作为参考轨道、钟差,参考GPS SPS (S-tandard Positioning Service)PS (Performance Standard)给出的平均URE计算公式,对2019年年积日(day of year,DOY)3–12 d的北斗二号、北斗三号以及GPS的广播星历轨道、钟差、URE结果进行了评估分析.
2 URE计算评估方法
2.1 URE计算方法
在2008年第4版GPS SPS PS中,已经给出了对应于GPS卫星的全球平均URE计算公式,方程如下[11]:

式中,c为光速,T为总的授时误差,R为径向轨道误差,A为切向轨道误差,C为法向轨道误差.计算全球导航卫星系统URE (GNSS URE)的一般公式可以表示为:

其中,SR、SAC为相应误差的贡献因子.如果不计算广播星历钟差误差,即得到仅包含广播星历轨道3维误差的URE,计算公式如下:

(1)式中的0.980、0.141即为相应误差的贡献因子,这是由于不同方向的广播星历轨道误差、钟差误差对空间信号的测距精度影响是不同的.贡献因子数值的不同主要受到卫星飞行轨道高度的影响,GPS、GLONASS (GLObalnaya NAvigatsionnaya Sputnikovaya Sistema)和Galileo 3个系统的主要构成都为MEO卫星,卫星轨道高度略有不同,因此这3个系统的贡献因子大小基本一致,相差不大.而北斗卫星导航系统则由MEO卫星和高轨道的GEO/IGSO卫星混合组成.由于高轨道卫星与中圆轨道卫星的轨道高度差距较大,相应卫星的贡献因子也会产生较大的变化,故需要根据导航系统卫星轨道的实际高度来计算系统的贡献因子.
表1列出了4大系统取地球高度截止角为0时URE计算式中贡献因子的数值[12].从贡献因子的数值上可以看出,卫星轨道高度越高,广播星历轨道径向误差对URE的影响越大,切向和法向误差对URE的影响越小.
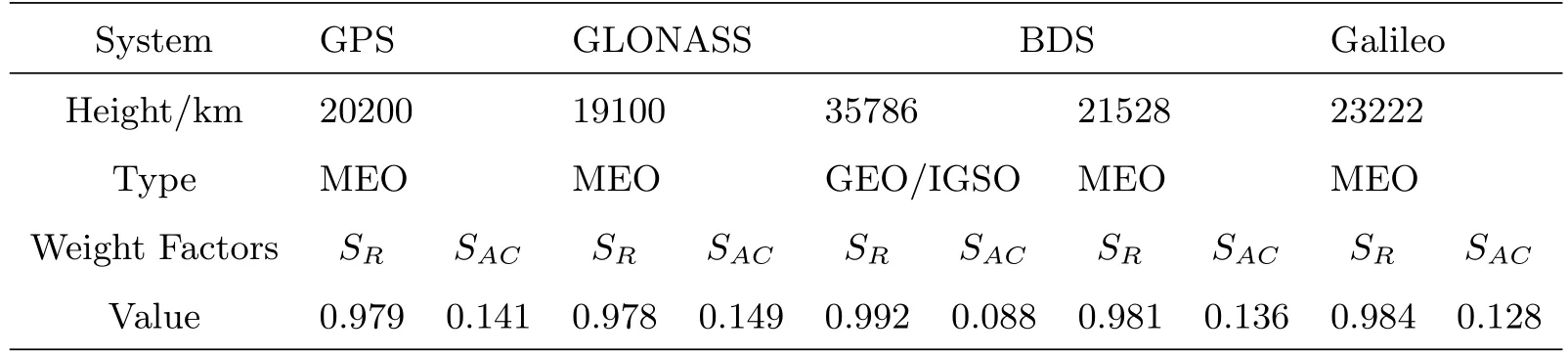
表1 GNSS 4大卫星导航系统URE贡献因子Table 1 URE contribution factors of four GNSS satellite navigation systems
2.2 URE评估策略
利用广播星历计算得到卫星的4维时空坐标从地固坐标系转换到RTN坐标系(R1,A1,C1,T1),其中,R1、A1、C1、T1分别为RTN坐标系下广播星历的径向轨道位置、切向轨道位置、法向轨道位置和时间.同时利用精密星历得到的卫星位置也转换到RTN坐标系(R2,A2,C2,T2),其中,R2、A2、C2、T2分别为RTN坐标系下精密星历的径向轨道位置、切向轨道位置、法向轨道位置和时间.将广播星历得到的R1、A1、C1与精密星历转换得到的R2、A2、C2作差,得到R、A、C.对于钟差采用同样操作,得到广播星历钟差误差T,最后通过公式计算得到URE,具体流程如下图所示.
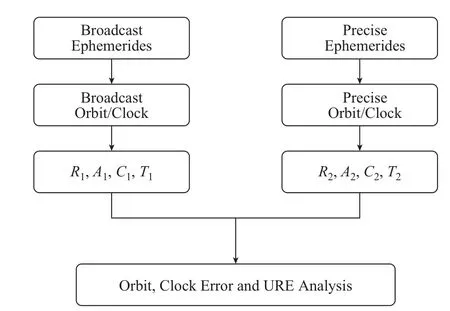
图1 利用精密星历进行空间信号精度评估的流程图Fig.1 Flow chart for the spatial signal accuracy assessment using a precision ephemeris
本文以上海天文台iGMAS分析中心提供的精密轨道、钟差作为GPS、北斗二号以及北斗三号的参考轨道、钟差.通过比较广播星历和精密星历的差异来评估广播星历精度.在进行轨道、钟差比较时,需要注意的是以下几个方面:
(1)统一卫星钟差基准.由于广播星历与精密星历的时间基准不一致,因此在进行钟差比较时,需要对卫星钟差基准进行统一.本文在统一卫星钟差基准时与大部分文献使用的方法一致,即进行2次求差消除参考钟不同引起的系统误差[10,13].
(2)群延迟时间(Time Group Delay,TGD)改正.由于BDS广播星历钟差时空参考点为B3频点,而iGMAS分析中心提供的精密钟差产品是通过B1、B3频点无电离层组合解算得到的,因此在进行钟差计算时,需要将B3频点的广播星历钟差归一化到B1、B3频点上,即:

式中,dtbrd为利用钟差参数计算的广播星历钟差,dt(brd(1,3))为归一化到B1、B3频点组合后的钟差,f1为B1I信号载波频率,f3为B3I信号载波频率,TGD1为星上设备时延差.
(3)天线相位中心改正.由于BDS广播星历是基于天线相位中心,而iGMAS分析中心给的精密轨道、钟差产品是基于质量中心,因此在进行轨道、钟差比较时必须扣除两者相位中心的差异.
3 URE评估
为有效评估分析当前北斗导航系统空间信号精度,本文选取了2019年年积日3–12 d的广播星历数据,以上海天文台iGMAS分析中心提供的精密轨道、钟差产品作为参考轨道、钟差,按照上文中给出的URE计算公式,对目前各系统广播星历轨道精度及URE进行评估.由于BDS是由3种轨道卫星组成的混合星座,因此按照卫星类型,将北斗二号分成GEO、IGSO、MEO卫星,北斗三号和GPS仅为MEO卫星进行后续评估分析.广播星历轨道、钟差、URE的RMS、STD (Standard Deviation)按下式计算:

式中,Xi为轨道、钟差、URE的计算结果,为对应的平均值,N为总计算个数.
同时还统计了置信度为95%的用户测距误差结果,置信度为95%的用户测距误差(95% Percentile URE,95%URE)即在一定时间间隔内,进行用户测距误差的95%分位数的统计测量.
3.1 广播星历轨道各方向误差统计与分析
本文计算并统计了GPS、北斗二号、北斗三号不同卫星类型的广播星历轨道平均值、RMS及STD结果,如表2所示.对于北斗二号、北斗三号各颗卫星绘制了广播星历轨道误差时序图,限于篇幅,对于每种卫星类型只选取其中一颗卫星的时序图展示,以C01 (GEO)、C06 (IGSO)、C12 (MEO)、C32 (MEO)结果为例,如图2所示.图中横轴为年积日,纵轴为广播星历轨道误差.同时,为了更直观地看出GPS、北斗二号、北斗三号各颗卫星的情况,绘制了各系统各颗卫星的广播星历轨道误差统计图,如图3–4.
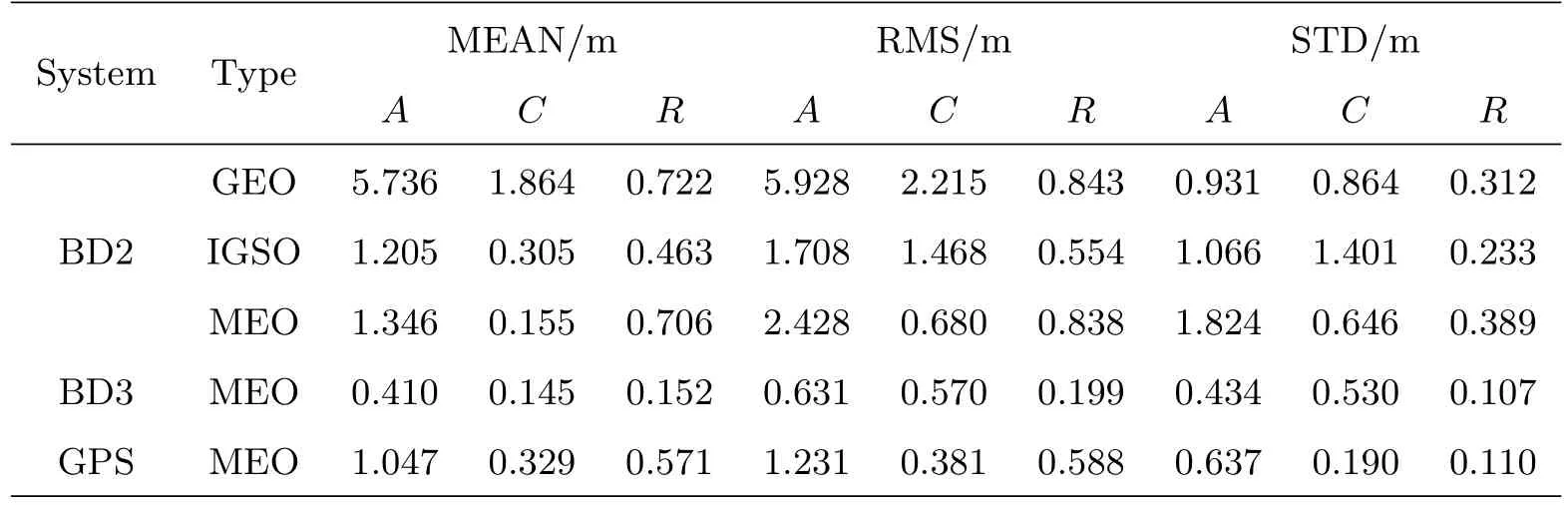
表2 广播星历轨道误差统计表Table 2 Statistical table of broadcast ephemeris orbit error
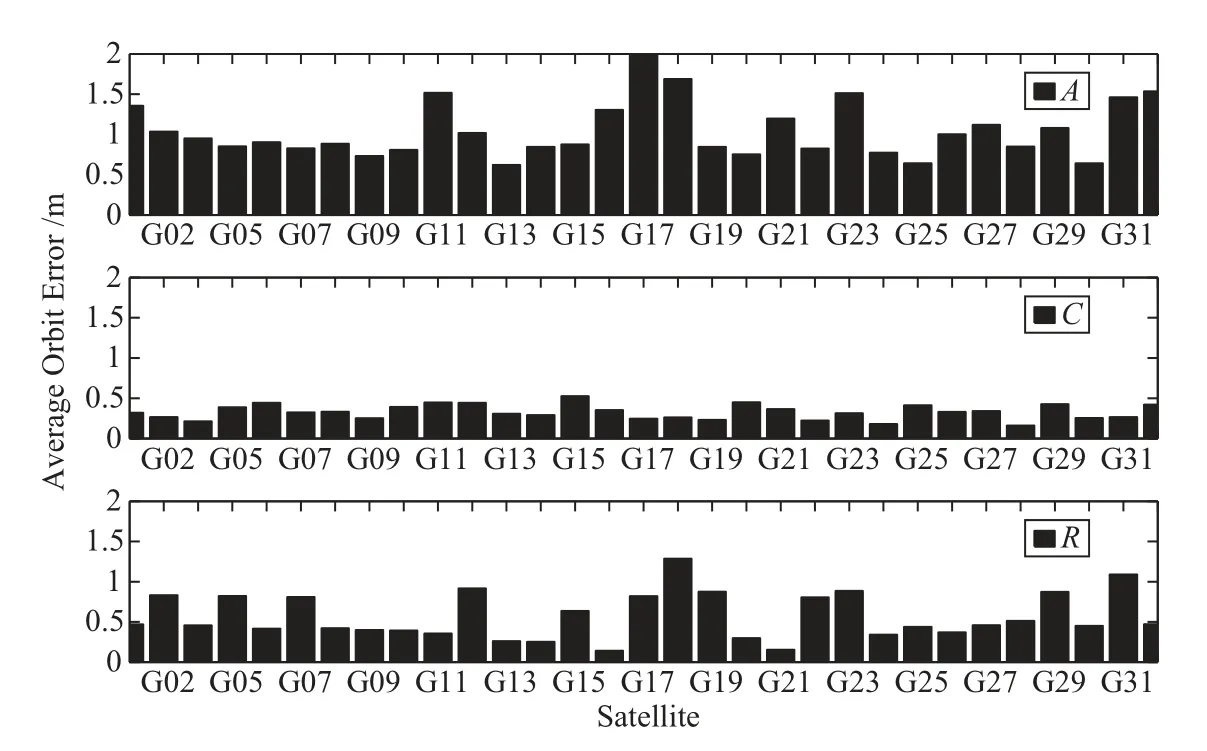
图4 GPS广播星历轨道误差统计图Fig.4 Statistical chart of GPS broadcast ephemeris orbit error
由表2及图2–4可以得出以下结论:
(1)从图2可以看出: 北斗二号、北斗三号广播星历轨道径向误差的变化幅度较另外两个方向要小,较少出现大的波动; 切向、法向误差的变化幅度偏大,稳定度低.
(2)就3个方向的精度结果来看,北斗三号径向、切向精度分别为0.199 m、0.631 m,优于北斗二号及GPS; 法向精度GPS结果最高,为0.381 m.从图3–4可以看出: GPS各颗卫星的径向结果在1 m范围内波动、法向结果在1.5 m范围内波动、切向结果在2 m范围内波动; 北斗三号各颗卫星3个方向的结果均在1 m范围内波动; 北斗二号GEO卫星切向结果在9 m范围内、法向在3.5 m范围内、径向在1.5 m范围内波动,其余卫星3个方向结果在2 m范围内波动.
(3)北斗三号广播星历轨道精度明显优于北斗二号,径向、切向精度优于GPS; 各系统广播星历轨道径向精度较高,其中北斗三号广播星历轨道径向精度最高,优于0.2 m.
3.2 广播钟差误差统计与分析
对广播星历钟差误差做与轨道误差同样的处理,需要说明的是,由于参考钟的不同,精密钟差和广播星历钟差的生成并不是在一个基准上,需要进行2次求差消除参考钟不同引起的系统误差.本文统计了广播星历钟差平均值、RMS以及STD结果,如表3所示.对于北斗二号、北斗三号各颗卫星绘制了广播星历钟差误差时序图,限于篇幅,对于每种卫星类型只选取其中一颗卫星的时序图展示,以C04 (GEO)、C07 (IGSO)、C14(MEO)、C27 (MEO)结果为例,如图5所示.图中横轴为年积日,纵轴为广播星历钟差误差.同时,为了更直观地看出GPS、北斗二号、北斗三号各颗卫星的情况,绘制了各系统各颗卫星的广播星历钟差误差统计图,如图6–7.
由图5–7及表3可以看出,北斗二号GEO、IGSO、MEO的广播星历钟差精度分别为0.9 ns、1.2 ns、1.3 ns; 北斗三号广播星历钟差精度为1.2 ns; GPS卫星广播星历钟差精度为0.9 ns.目前BDS广播星历钟差误差基本范围在0–2 ns,等效造成的测距误差小于1 m; GPS广播星历钟差误差基本范围在0–3.5 ns,等效造成的测距误差约为1 m.北斗三号各颗卫星的钟差变化较小,较为稳定.
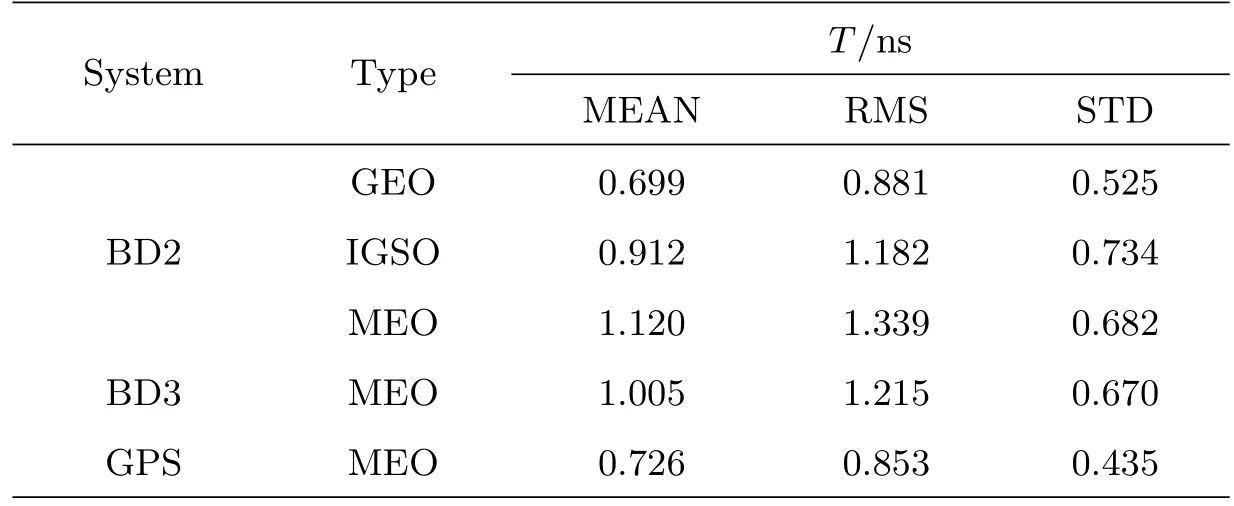
表3 广播钟差统计表Table 3 Statistical table of broadcast ephemeris clock error
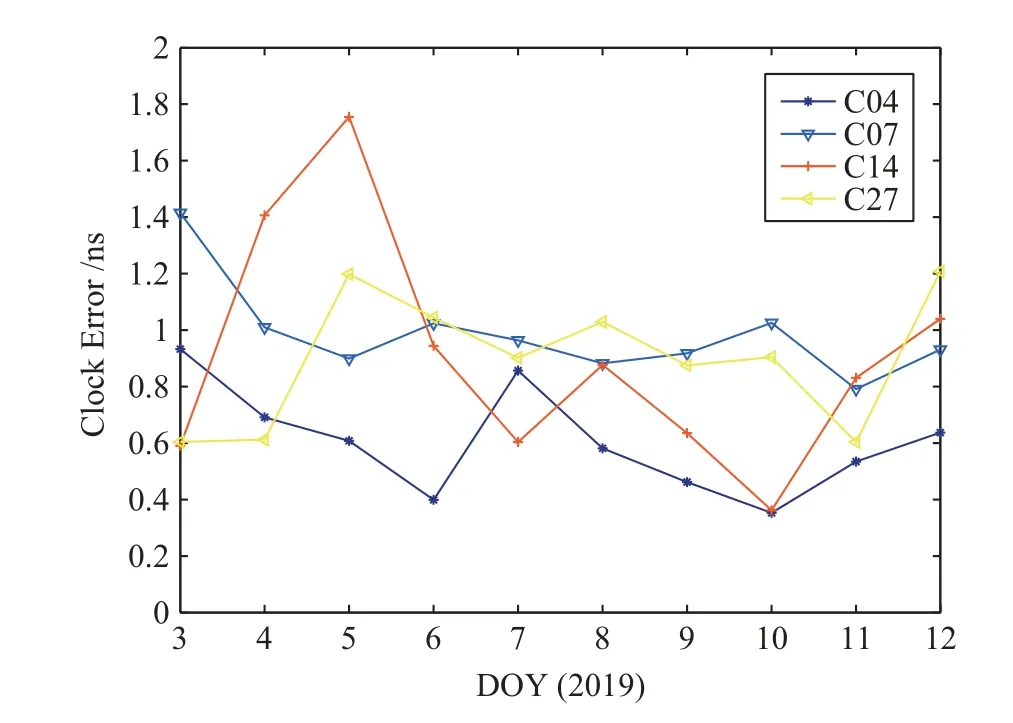
图5 北斗广播星历钟差误差时序图(C04、C07、C14、C27)Fig.5 Timing chart of BDS broadcast ephemeris clock error (C04,C07,C14,and C27)
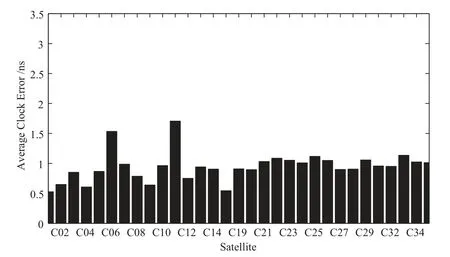
图6 BDS广播星历钟差误差统计图Fig.6 Statistical chart of BDS broadcast ephemeris clock error
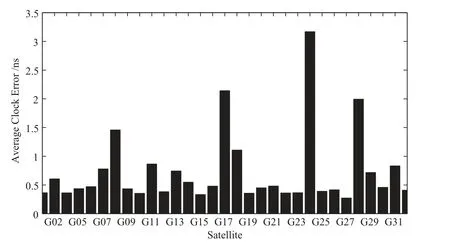
图7 GPS广播星历钟差误差统计图Fig.7 Statistical chart of GPS broadcast ephemeris clock error
3.3 广播星历URE分析
本文计算并统计了各卫星导航系统各类卫星的URE平均值、95%URE、URE RMS、URE STD结果,如表4所示.对于北斗二号、北斗三号各颗卫星绘制了URE均值时序图,限于篇幅,对于每种卫星类型只选取其中一颗卫星的时序图展示,以C02(GEO)、C09 (IGSO)、C11 (MEO)、C23 (MEO)为例,如图8所示.图中横轴为年积日,纵轴为URE均值.同时,为了更直观地看出GPS、北斗二号、北斗三号不同卫星的情况,绘制了各系统各颗星的95%URE、URE RMS统计图,如图9–10.
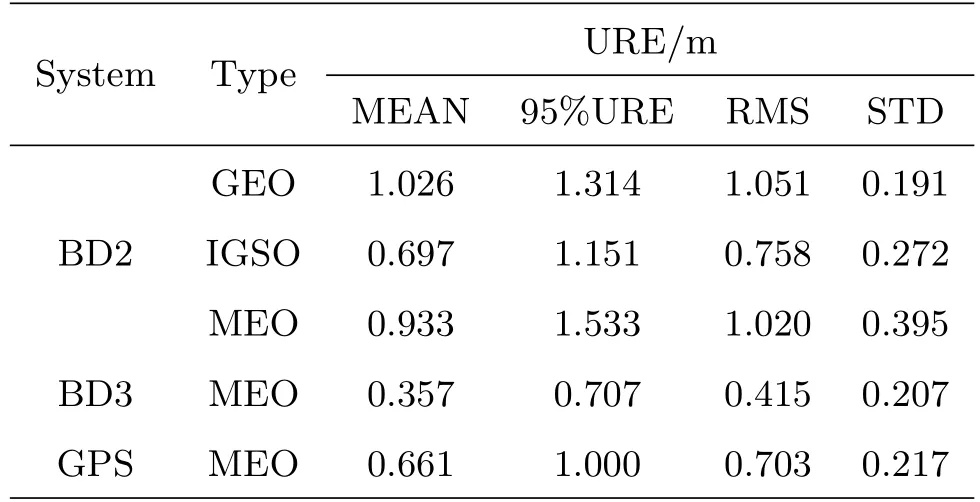
表4 空间信号精度统计表Table 4 Statistical table of spatial signal accuracy
结合表4以及图8–10可以得出以下结论:
(1)目前,GPS的URE均值为0.661 m、95%URE为1 m、RMS为0.703 m; 北斗三号URE均值为0.357 m、95%URE为0.707 m、RMS为0.415 m; 北斗二号URE均值为0.7–1 m、95%URE为1.1–1.5 m、RMS为0.7–1 m.
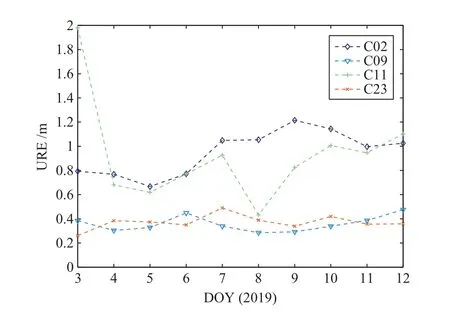
图8 北斗URE均值时序图(C02、C09、C11、C23)Fig.8 Timing chart of BDS URE average (C02,C09,C11,and C23)
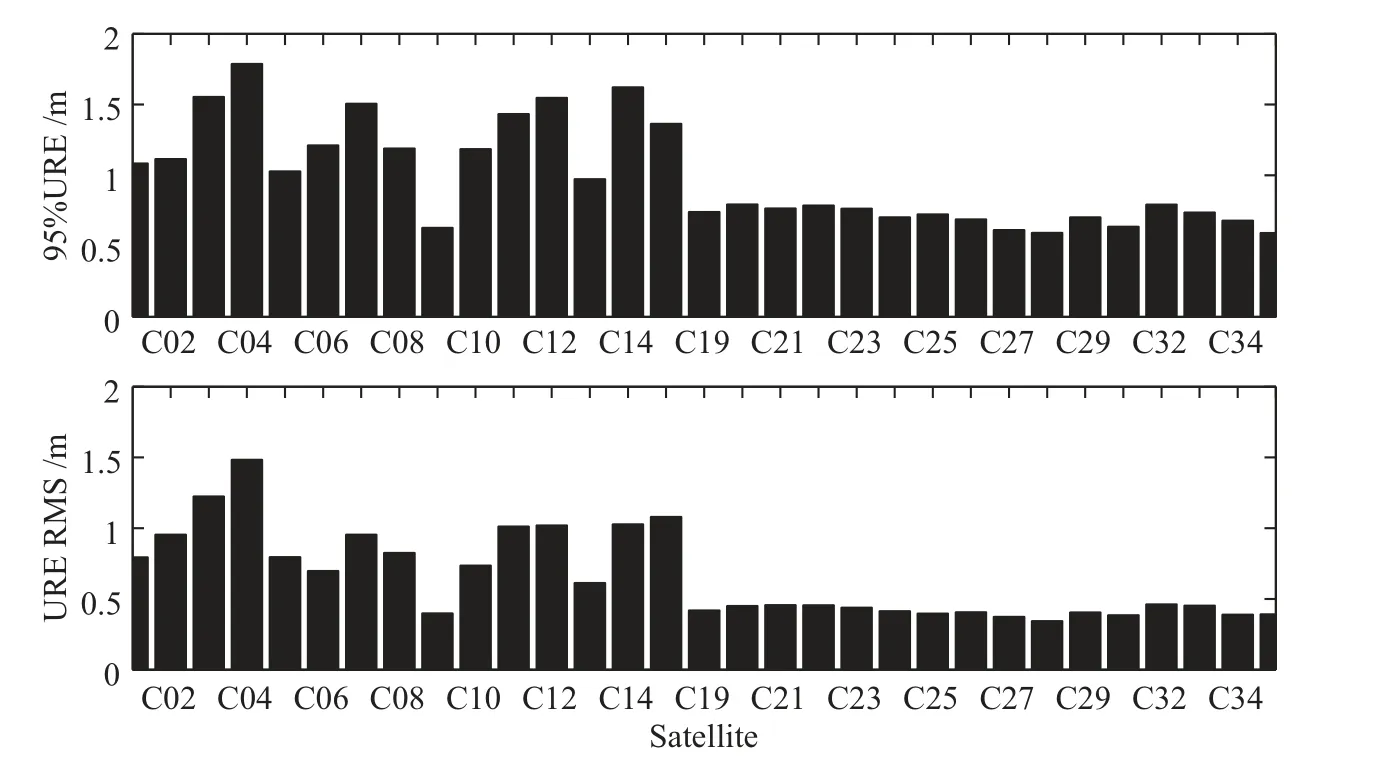
图9 BDS 95%URE、URE RMS统计图Fig.9 Statistical chart of BDS 95%URE and URE RMS
(2)北斗二号中,IGSO卫星URE RMS最高,优于0.8 m; 由于定轨精度低导致GEO卫星URE较大; 由于北斗二号为区域系统,各监测站在中国境内1 d对MEO卫星的可见时间短,导致卫星钟差预报精度较低,从而影响URE RMS结果,致使MEO卫星较IGSO卫星URE RMS低.
(3)北斗三号URE结果明显优于北斗二号,部分卫星结果优于GPS,且各颗卫星URE结果稳定度高,未出现较大波动以及异常结果.
(4)北斗二号每颗卫星URE、95%URE、URE RMS结果小于2 m,北斗三号每颗卫星URE、95%URE、URE RMS结果小于1 m,均达到了系统公开承诺的服务性能标准.
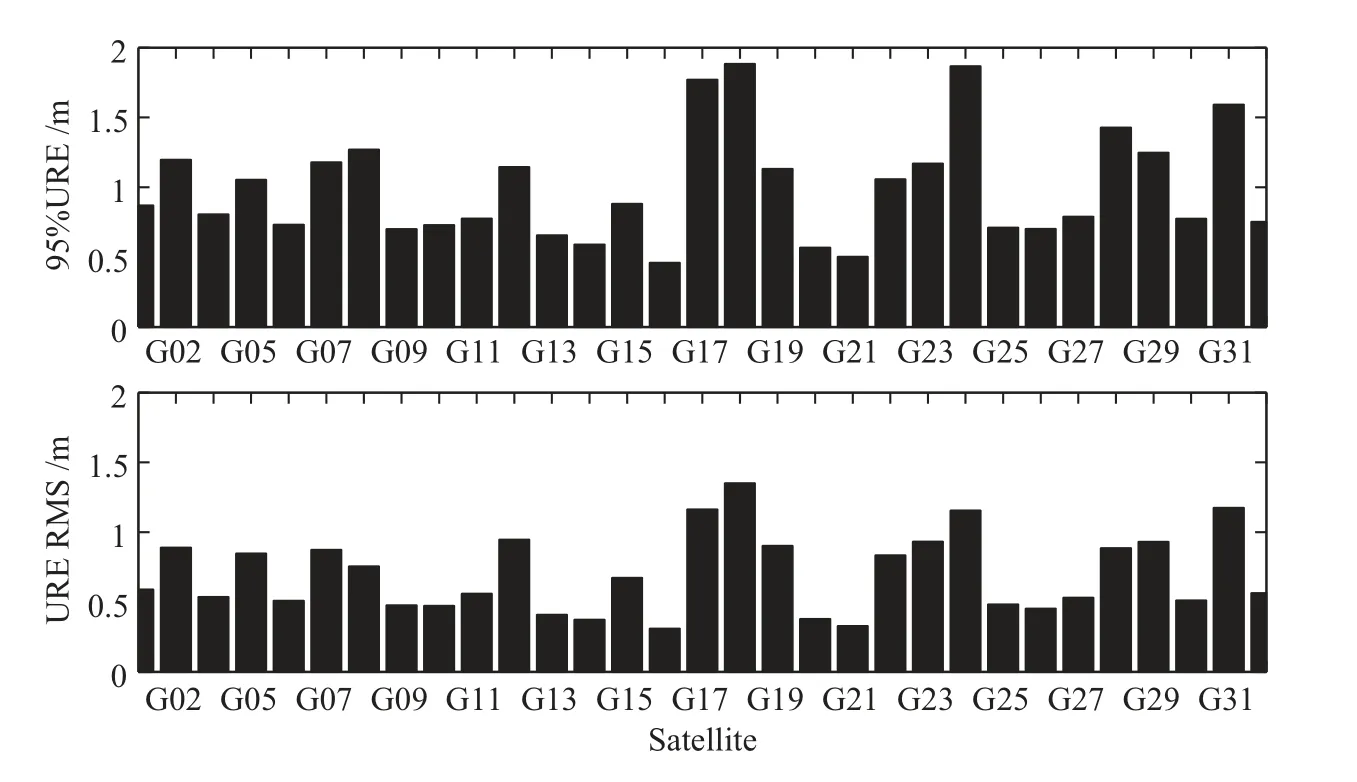
图10 GPS 95%URE、URE RMS统计图Fig.10 Statistical chart of GPS 95%URE and URE RMS
4 结论
本文通过分析BDS、GPS 2019年年积日3–12 d的广播星历轨道、钟差数据,对各类卫星广播星历轨道、钟差及URE性能进行了评估与统计分析.研究结果表明:
(1)北斗三号广播星历轨道精度明显优于北斗二号,径向、切向结果优于GPS,其中广播星历轨道径向精度最高,优于0.2 m;
(2)目前BDS广播星历钟差误差处于0–2 ns,GPS广播星历钟差误差处于0–3.5 ns,北斗三号各颗卫星的钟差变化较小,较为稳定;
(3)北斗二号URE RMS为0.7–1 m,北斗三号URE RMS为0.415 m,GPS URE RMS为0.703 m.北斗三号URE结果明显优于北斗二号,部分卫星结果优于GPS,且各颗卫星的URE结果较为稳定,未出现异常波动;
(4)北斗二号每颗卫星URE、95%URE、URE RMS结果小于2 m,北斗三号每颗卫星URE、95%URE、URE RMS结果小于1 m,均达到了系统公开承诺的服务性能标准.
